(54) СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ШАХТНОЙ ПОДЪЕМНОЙ МАШИНОЙ С АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления предохранительным торможением подъемной установки | 1975 |
|
SU753761A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1967 |
|
SU205922A1 |
| АВТОМАТИЗИРОВАННЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ | 1969 |
|
SU257583A1 |
| Устройство для управления скоростью движения транспортных средств | 1980 |
|
SU919918A2 |
| Электропривод шахтной подъемной машины | 1986 |
|
SU1390754A1 |
| Устройство управления тормозом шахтной подъемной машины | 1989 |
|
SU1676981A1 |
| Способ защиты подъемного сосуда от жесткой посадки и устройство для его осуществления | 1987 |
|
SU1444267A1 |
| Электропривод шахтной подъемной машины | 1984 |
|
SU1277332A1 |
| Электропривод постоянного тока шахтной подъемной установки | 1988 |
|
SU1654208A1 |
| Устройство для управления электроприводом шахтной подъемной машины | 1961 |
|
SU150914A1 |
I
Изобретение относится к автоматическому управлению позиционными механизмами, в частности шахтными подъемными машинами, оборудованными асинхронными электродвигателями с фазным ротором.
Известна система автоматического управления шахтными подъемными машинами, содержащая узел команд на начало движения и остановку, узел путевых команд с подключенными к его выходу задатчиком интенсивности, узел сравнения, к входу которого подключены выход задатчика интенсивности и тахогенератор, а к выходу - регулируемый источник тока динамического торможения и усилитель системы регулирования тормоза. В этой системе автоматизация периода дотягивания подъемных сосудов в разгрузочных кривых достигается путем автоматического регулирования момента механического тормоза, компенсируюшего избыточную часть двигательного момента 1.
Недостатки системы состоят в повышенном износе механического тормоза и дополнительном расходе электроэнергии.
Наиболее близкой к предлагаемой по технической сущности и достигаемому результату является система автоматического управления шахтной подъемной машиной с асинхронным электроприводом, содержащая узел команд на начало движения и остановку с реле движения на выходе, реле скорости, узел путевых команд, подсоединенный
5 входом через контакт реле движения к источнику питания, а выходами - к реле максимального задания и задатчику интенсивности, узел сравнения, ко входам которого подключены задатчик интенсивности и хогенератор, а к выходу - регулируемый источник постоянного тока для динамического торможения, тиристоркый коммутатор и усилитель системы регулирования тормоза с обмоткой регулятора давления на выходе 2.
ts Однако система не обладает достаточной приспосабливаемостью к различным условиям эксплуатации и технологического процесса. Так, если возникает необходимость перейти к замедлению с последующим стопорением еще до окончания пуска (т. е.
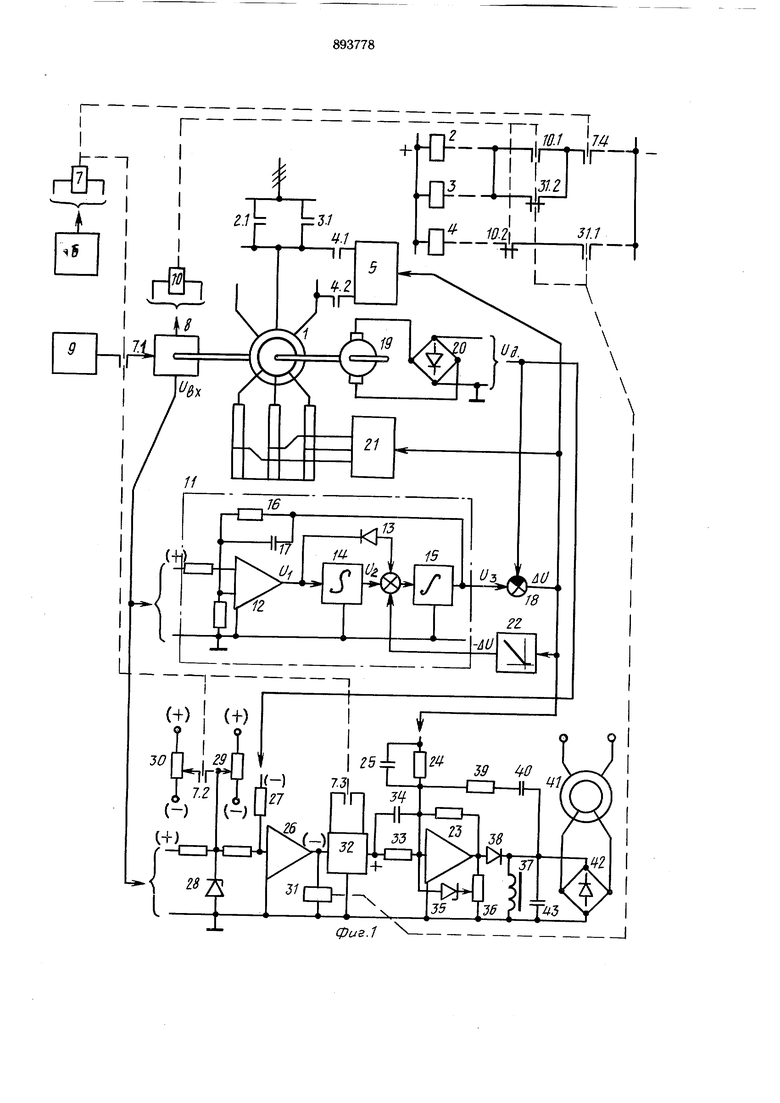
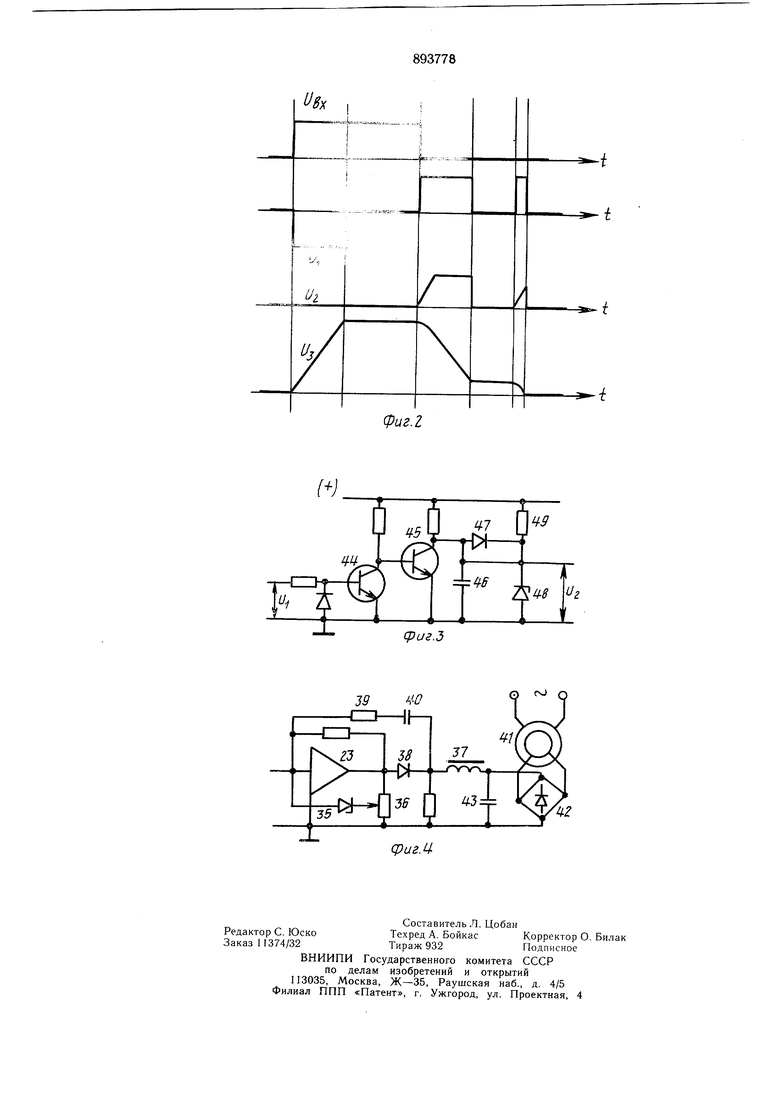
20 реализовать треугольную диаграмму скорости), то, поскольку реле скорости еще не включилось, в момент подачи команды на замедление на мащину накладывается механический тормозной момент стопорения. В результате возникают значительные динамические перегрузки, представляющие большую опасность для подъемной установки. Настройка этого реле производится на отпадание при таком превышении действительной скорости над заданной, чтобы переход к дотягиванию происходил без нежелательных всплесков или провалов скорости. Однако при замедлении с последующим стопорением требуется иная настройка этого же реле. В результате в момент стопорения мащины может наблюдаться чрезмерный рывок или проворот барабанов в обратную сторону. В конечном счете приходится стремиться к компромиссной настройке, что требует значительных затрат времени, хотя достигаемый результат далек от оптимального. Переход от равномерного движения на максимальной скорости к основному замедлению часто сопровождается динамическим ударом в кинематической цепи подъемной двигатель-барабан, так как при этом имеет место скачкообразный переход от двигательного момента к динамическому (т. е. тормозному) моменту. Качество регулирования механического тормозного момента остается невысоким ввиду нечувствите/ьности системы авторегулирования тормоза к малым сигналам на выходе усилителя тормоза. Разнотипность применяемых на подъемных машинах тормозных систем затрудняет создание единой для всех типов машин системы автоматического управления. Цель изобретения - улучшение приспосабливаемости системы к различным условиям эксплуатации и снижение уровня динамических нагрузок в механических узлах подъемной установки. Поставленная цель в системе автоматического управления шахтной подъемной машиной с асинхронным электроприводом достигается тем, что она снабжена ограничителем напряжения, элементом ИЛИ, подстроечным резистором и усилителем с релейной характеристикой, ко входу которого подключены тахогенератор, через ограничитель напряжения - выход узла путевых команд и через ограничитель напряжения и контакт реле движения - подстроечный резистор, а к выходу - реле скорости и через элемент ИЛИ - усилитель системы регулирования тормоза, причем другой вход элемента ИЛИ подключен к контакту реле движения, а задатчик интенсивности содержит однополярный неинвертируюихий интегратор, параллельно которому в обратном направлении включен диод. Причем однополярный неинвертирующий интегратор содержит двухкаскадный транзисторный усилитель, к выходу которого подключены интегрирующий конденсатор и ограничитель напряжения. Кроме того обмотка регулятора давления подключена к выходу усилителя системы регулирования тормоза через развязывающий диод, охваченный совместно с усилителем инерционной гибкой отрицательной обратной связью. На фиг. 1 приведена схема автоматического управления; на фиг. 2 - диаграммы изменения формируемых в задатчике интенсивности сигналов управления; на фиг. 3 - принципиальная схема однополярного неинвертирующего интегратора; ha фиг. 4 - вариант подключения обмотки регулятора давления для подъемных машин с гидрогрузовым, пневмо- или гидропружинным тормозом. Устройство содержит подъемный двигатель 1, подключаемый контактором 2 или 3 реверсора с помощью контактов 2.1 или 3.1 к сети переменного тока или контактором 4 с помощью контактов 4.1 к регулируемому источнику 5 постоянного тока для динамического торможения, узел б команд на начало движения и остановку с реле 7 движения на выходе, узел 8 путевых команд с подключенным через контакт 7.1 реле 7 движения источником 9 питания и подключенными к выходам узла реле 10 максимального задания с контактами 10.1 и 10.2 и задатчиком 11 интенсивности, содержащим в прямом канале регулирования насыщающийся усилитель 12, диод 13, однополярный неинвертирующий интегратор 14 и инвертирующий интегратор 15 и в цепи обратной связи - резистор 16 и конденсатор 17, узел 18 сравнения, ко входу которого подключены выход задатчика 11 интенсивности и тахогенератор 19 через выпрямительный мост 20, а к выходу - регулируемый источник 5 постоянного тока, тиристорный коммутатор 21, интегратор 15 через инвертор 22 и усилитель 23 системы регулирования тормоза через резистор 24 и конденсатор 25. Устройство содержит также усилитель 26 с релейной характеристикой, ко входу которого подключены тахогенератор 19 через выпрямительный мост 20 и резистор 27 и через ограничитель напряжения на стабилитроне 28 выход узла 8 путевых команд, выход подстроечного резистора 29 и через контакт 7.2 реле 7 движения выход подстроечного резистора 30, а к выходу - реле 31 скорости и усилитель 23 системы регулирования тормоза через логический элемент 32, реализующий функцию ИЛИ резистор 33 и конденсатор 34. К другому входу логического элемента 32 подключен контакт 7.3 реле 7 движения. Усилитель 23 снабжен выполненным на стабилитроне 35 и потенциометре 36 регулируемым ограничителем напряжения, к его выходу подключена обмотка 37 регулятора .цавления через развязывающий диод 38, после которого подключена охватывающая усилитель инерционная гибкая отрицательная обратная связь.
содержащая резистор 39 и конденсатор 40. К обмотке 37 регулятора давления подключен также выход сельсина 41 ручного управления тормозом через выпрямительный мост 42 со сглаживающим конденсатором 43. Однополярный неинвертирующий интегратор 14 содержит двухкаскадный усилитель на транзисторах 44 и 45, к выходу которого подключены интегрирующий конденсатор 46 и ограничитель направления на диоде 47, стабилитроне 48 и резисторе 49. На чертежах обозначены также выходной сигнал UBX узла путевых команд, выходной сигнал U г усилителя 12, выходной сигнал Uj интегратора 14, сигнал заданной скорости Уз на выходе задатчика 11 интенсивности, сигнал действительной скорости Ua на выходе тахогенератора 19 и сигнал ощибки по скорости ди на выходе узла 8 сравнения, время t.
Устройство работает следующим образом.
Выбор режима работы подъемной мащины осуществляют реле 7 движения, реле 31 скорости и реле 10 максимального задания, которое подключено к узлу путевых команд по одной из известных схем таким образом, что включается только при максимальной величине сигнала Ugx- Так, если включены реле 7 и 10, то контактором 2 и 3 подъемный двигатель 1 подключается к сети и происходит его пуск до максимальной скорости. Если включено реле 31, то подъемный двигатель подключается контактором 4 к регулируемому источнику 5 постоянного тока и производится замедление мащины в режиме динамического торможения. Если включено реле 7, то предусматривается движение в двигательном режиме на пониженной скорости, т.е.с введенным сопротивлением в цепи ротора подъемного двигателя. Если отключены все реле, то статорные контакторы 2-4 также отключены, и машина стопорится механическим тормозом.
В исходном состоянии подъемные сосуды находятся в крайних положениях под разгрузкой, а мащина застопорена механическим тормозом благодаря максимальному сигналу на выходе усилителя 23. В узел 6 команд на начало движения и остановку поступает информация о ходе процессов разгрузки-и загрузки подъемных сосудов и после их окончания включается реле 7 движения и выполняет следующие операции: включает с помощью контакторов 7.4. контактор 2 или 3 реверсора, в зависимости от выбранного направления движения, растормаживает мащину через логический элемеит 32, подключает источник 9 питания к узлу 8 путевых команд и выход подстроечного резистора 30 к входу усилителя 26. В результате на выходе узла 8 появляется положительный сигнал и,,, который пропорционален требуемой величине скорости и изменяется ступенчато в результате срабатывания этажных выключателей путевого командоаппарата. Если узел 8 программирует пуск до максимальной скорости, то включается и реле 10 максимального задания. Пуск производится путем ступенчатого выведения роторных сопротивлений контакторами (не показаны), управление которыми автоматизировано с помощью специального аппарата.
Сигнал Ugjj поступает на инвертирующий вход насыщающегося усилителя 12 задатчика 11 интенсивности, который формирует в функции времени сигнал заданной скорости Us. В результате на выходе усилителя 12 устанавливается максимальный отрицательный сигнал Ui, поступающий через диод 13 на вход инвертирующего интегратора 15, тогда как однополярный неинвертирующий
5 интегратор 14 не реагирует на отрицательный входной сигнал и напряжение Uz на его выходе сохраняется равным нулю. Поэтому сигнал заданной скорости Us на выходе интегратора 15 возрастает во времени по линейному закону до тех пор, пока сигнал
0 обратной связи, поступающий на неинвертирующий вход усилителя 12 через формирующую цепочку из резистора 16 и конденсатора 17, не станет равным сигналу UBX и сигнал Ui не обратится в нуль. В узле 18 срав5нения сигнал Us сравнивается с поступающим от тахогенератора 19 сигналом действительной скорости Ug и вырабатывается сигнал ощибки по скорости AU Uj - Ua. В период пуска интенсивность возрастания
0 сигнала Uj выбирается такой, чтобы обеспечивалось ди О, так как в противном случае может произойти подтормаживание мащины механическим тормозом. Сигнал ди поступает на входы регулируемого источника 5 постоянного тока, тиристорного коммутатора 21 и усилителя 23 системы регулирования тормоза.
Сигнал UBX поступает и на вход усилителя 26 с релейной характеристикой через ограничитель напряжения, выполненный на
0 стабилитроне 28, и сравнивается на входе усилителя с сигналом Ua. Если задан пуск до максимальной скорости (Ugx макс.), то стабилитрон 28 пробит и нейтрализует действие сигналов, поступающих от резисторов 29 и 30. Резистор 27 выбран таким, что при скорости около от максимальной усилитель 26 и, следовательно, реле 31 включаются. Включение реле 31 свидетельствует об исправности схемы пуска подъемного двигателя, цепей тахогенератора и усилителя 26
0 и поэтому контролируется аппаратурой защиты подъемной установки. Выход усилителя 26 подключен к элементу 32, выполняющему логическую функцию ИЛИ, т. е. для появления сигнала на его выходе достаточно включения усилителя 26 или реле 7. Сигнал с.выхода элемента 32 поступает на вход усилителя 23, на выходе которого устанавливается минимальное напряжение; соответствующее расторможенному состоянию машины.
В точке начала основного замедления сигнал UBX скачком уменьшается до величины, соответствуюш,ей желаемому значению скорости дотягивания. В результате реле 10 отключается и двигатель переводится в режим динамического торможения, регулирование которого производится в функции сигнала Ди. Уменьшение сигнала U§i вызывает появление на выходе усилителя 12 положительного сигнала Ui, поступаюшего на вход интегратора 14. В результате транзистор 44 открывается, транзистор 45 закрывается и происходит заряд конденсатора 46 по закону экспоненты, у которой используется только близкий к линейному начальный участок благодаря срезаюш,ему действию ограничителя напряжения иа диоде 47, стабилитроне 48 и резисторе 49. Поэтому положительный сигнал Ua возрастает во времени практически по линейному закону, а сигнал УЗ уменьшается во времени по параболическому, а затем по линейному законам. Таким образом, происходит ограничение рывка и ток динамического торможения возрастает плавно с нуля, что позволяет устранить динамический удар в момент перехода к замедлению. Когда сигнал УЗ уменьшится до требуемой величины, сигнал U) станет меньше порога чувствительности интегратора 14, транзистор 44 закроется транзистор 45 откроется и через него произойдет разряд конденсатора 46. Как известно, переходной процесс в контуре, содержашем два интегратора, должен носить колебательный характер. Однако в данном случае сигнал Uj уменьшается до установившегося значения монотонно по следующим причинам: вопервых, коэффициент усиления по току двухкаскадного усилителя на транзисторах 44 и 45 велик, а энергоемкость конденсатора 46 сравнительно невелика и поэтому он разряжается через транзистор 45 почти мгновенно, и, во-вторых, задатчик интенсивности охвачей гибкой отрицательной обратной связью через конденсатор 17. В процессе основного замедления, как правило, сигнал ошибки ди 0 и он проходит через инвертор 22 на вход интегратора 15, осуществляя коррекцию сигнала Us с целью компенсации ожидаемого разброса по величине пути замедления при отклонении момента нагрузки на валу двигателя от расчетного.
Вследствие скачкообразного уменьшения сигнала UBX в точке начала основного замедления стабилитрон 28 восстанавливает свои запирающие свойства и на вход усилителя 26 проходят сигналы от резисторов 29 и 30. Поэтому регулировкой резистора 30 легко обеспечивается отключение усилителя 26 и реле 31 при требуемом превышении действительной скорости над скоростью дотягивания. Реле 31 с помошью контактов 31.1
контактором 4 отключает подъемный двигатель от источника 5 постояиного тока и с помощью контактов 31.2 контактором 2 или 3 подключает его к сети. Дальнейщее регулирование скорости в период дотягивания производится тиристорным коммутатором 21 в функции сигнала ошибки AU. По достижении подъемными сосудами крайних положений через узел 6 поступает команда на остановку, реле 7 отключается, мащина стопорится механическим тормозом, а подъемный двигатель отключается от сети.
Если через узел 6 поступает команда на замедление с последующим стопорением (например, в случае постановки подъемных сосудов на «отбой в промежуточной точке ствола вследствие переполнения приемного бункера), то реле 7 также отключается, но машина остается расторможенной, так как на вход элемента 32 продолжает поступать сигнал с выхода усилителя 26. В результате отключается питание узла 8 и сигнал Uex обращается в нуль, отключается резистор 30 и машина замедляется в режиме динамического торможения уже рассмотренным образом. В этом случае величина действительной скорости, при которой происходит отключение усилителя 26 и реле 31, устанавливается резистором 29.
Если через узел 6 или 8 поступает команда иа замедление еще до окончания пуска, то в момент скачкообразного уменьщения сигнала UBX включаются усилитель 26 и реле 31 и подъемный двигатель переводится в режим динамического торможения, а мащина остается расторможенной и выполняет заданную диаграмму скорости уже рассмотренным образом.
Управление механическим тормозом производится через обмотку 37 регулятора давления в автоматическом режиме регулированием напряжения усилителя 23, в ручном режиме изменением напряжения на выходе сельсина 41 путем поворота его ротора на необходимый угол. Если подъемная мащина оборудована пневмогрузовым тормозом, то увеличение тока в обмотке регулятора давления вызывает увеличение тормозного момента и для этого случая применяется схема подключення обмотки согласно фиг. 1. Если подъемная машина оборудована гидрогрузовым, пневмо- или гидропружинным тормозом, то увеличение тока в обмотке регулятора давления вызывает уменьщение тормозного момента, и для этого случая применяется схема подключения обмотки согласно фиг. 4. В обоих случаях увеличение напряжения на выходе уснлителя 23 вызывает увеличение тормозного момента, т. е. независнмо от типа механического тормоза его система управления сохраняется неизменной. Чтобы при ручном управлении тормозом напряжение, поступающее от сельсина 41, не замыкалось через усилитель 23, в схему введен развязывающий диод 38. Конденсатор сглаживает выпрямленное выходное напряжение сельсина, чрезмерные пульсации которого ухудшают линейность характеристики вход-выход усилителя 23 на ее начальном участке. На разных подъемных машинах одному и тому же максимальному напряжению на выходе усилителя 23 соответствует различная кратность тормозного момента стопорения по отношению к моменту статической нагрузки. При чрезмерной кратности в элементах тормозной системы будут возникать излишние усилия, что нежелательно. Поэтому предусмотрена регулируемая отсечка по выходному напряжению усилителя 23 через сталибитрон 35 и потенциометр 36, которым устанавливается требуемая величина тормозного момента стопорения. При выдолнении заданной диаграммы скорости в автоматическом режиме механический тормоз вмешивается в процесс основного замедления или дотягивания только в том случае, если динамическое торможение или тиристорный коммутатор не обеспечивают требуемой точности регулирования и сигналы ошибки ди становятся чрезмерно большими. Необходимое качество регулирования в системе управления тормозом достигается при этом выбором параметром форсируюш,его конденсатора 25 и охватывающей усилитель 23 инерционной гибкой отрицательной связи через резистор 39 и конденсатор 40. При расторможенной машине через обмотку регулятора давления протекает дежурный ток, создающей на ней некоторое падение напряжения, тогда как выходное напряжение усилителя 23 может быть равным нулю и, соответственно, к диоду 38 прилагается обратное напряжение. Поэтому зависимость тока обмотки регулятора давления от выходного напряжения усилителя 23 имеет зону нечувствительности на начальном .участке, что должно оказывать существенное негативное влияние на процесс регулирования тормозного момента. Поскольку собственно усилитель 23 безынерционен, а охватывающая усилитель инерционная гибкая отрицательная обратная связь подключена к его выходу после диода 38 и не действует в пределах зоны нечувствительности, то ее негативное влияние на процесс регулирования практически не проявляется.
Таким образом, устройство позволяет осуществить практически диаграмму скорости и тем самым повысить уровень и расщирить возможность автоматического управления, существенно сократить затраты времени на пусковую наладку, унифицировать блок автоматического управления, повысить производительность труда при выполнении пуско-наладочных работ, снизить уровень
динамических нагрузок в механических узлах подъемной машины, увеличить срок ее службы.
Формула изобретения
реле движения на выходе, реле скорости, узел путевых команд, подсоединенный входом через контакт реле движения к источни; ку питания, а выходами - к реле максимального задания и задатчику интенснвности, узел сравнения, ко входам которого подключены задатчик интенсивности и тахогеНератор, а к выходу - регулируемый источник постоянного тока для динамического торможения, тиристорный коммутатор и усилитель системы регулирования тормоза с обмоткой регулятора давления на выходе, отличающаяся тем, что, с целью улучшения приспосабливаемости системы к различным условиям эксплуатации и снижения уровня динамических нагрузок в механических узлах подъемной установки, она снабжена ограничителем напряжения, элементом ИЛИ, подстроечным резистором и усилителем с релейной характеристикой, ко входу которого подключены тахогенератор, через ограничитель напряжения - выход узла путевых команд и через ограничитель напряжения и контакт реле движения, подстроечный резистор, а к выходу - реле скорости и через элемент ИЛИ - усилитель системы регулирования тормоза, причем вход элемента ИЛ}1 подключен к контакту реле движения,
а задатчик интенсивности содержит однополярный инвертирующий интегратор, параллельно которому в обратном направлении включен диод.
Источники информации, принятые во внимание при экспертизе
/
