Изобретение относится к робототех нике и может быть использовано при создалии робототизированных комплексов .
Цель изобретения - повышение быст родействия, за счет обеспечения параллельной роботы приводов, а также повышение надежности устройства за счет обеспечения контроля исполнения команд.
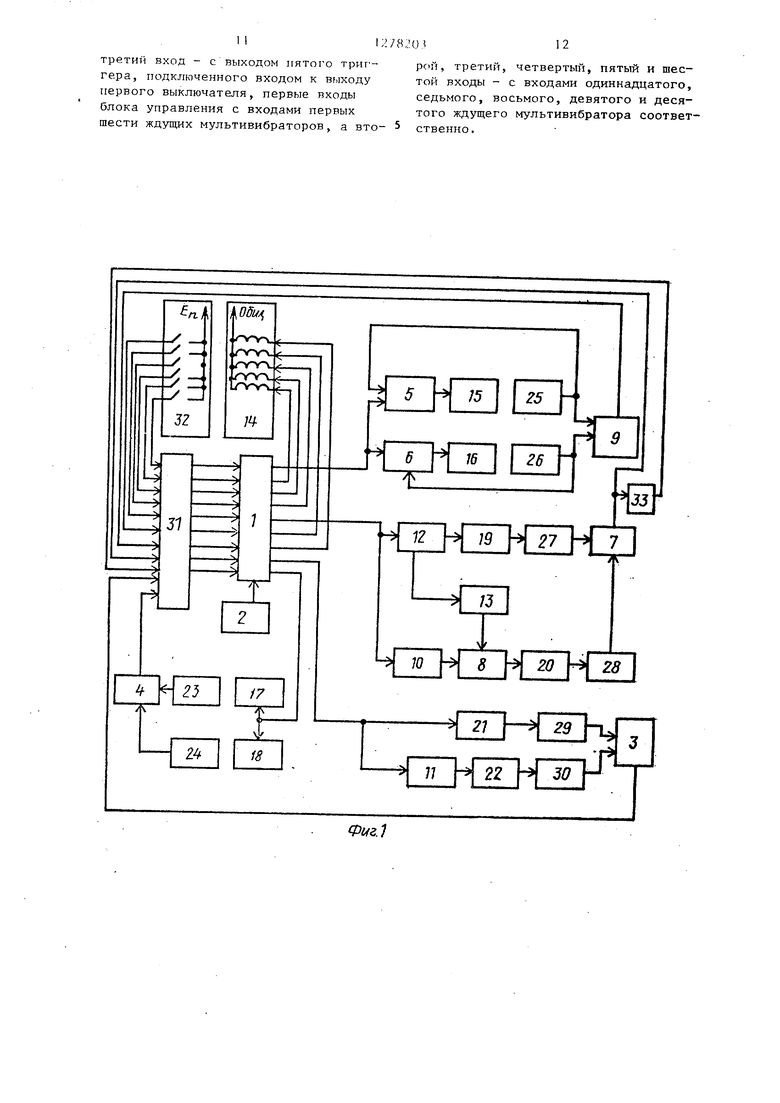
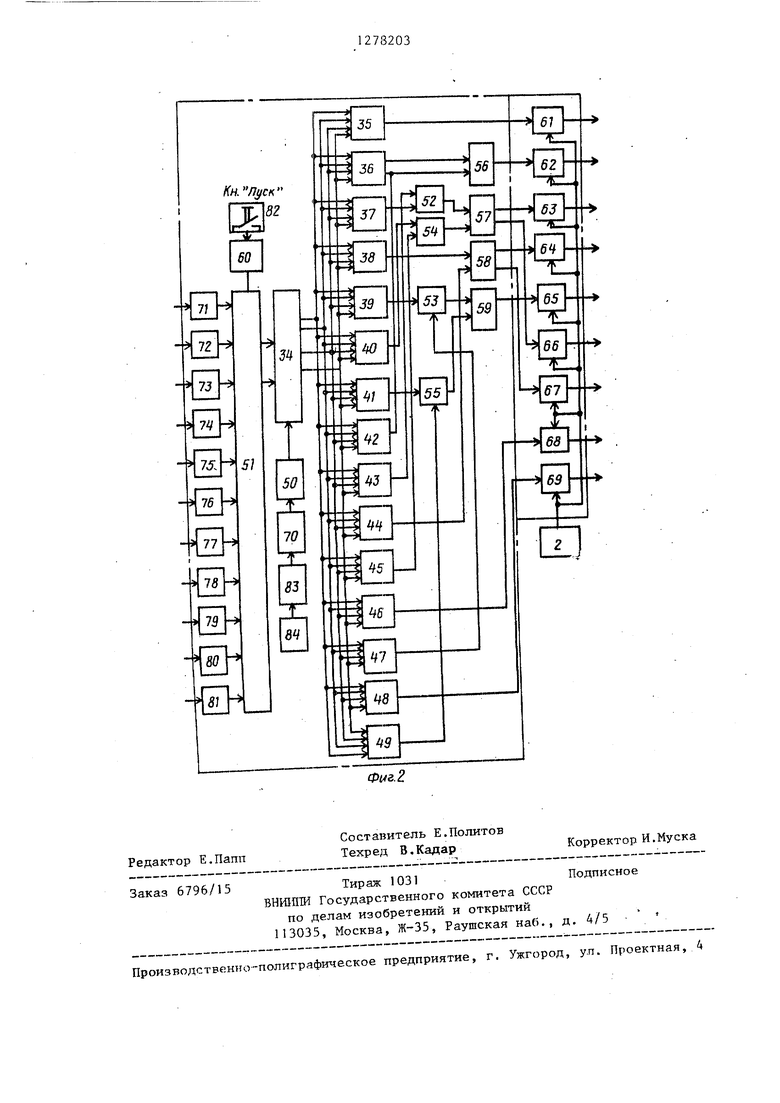
На фиг. представлена функциональ ная схема устройства; на фиг.2 - функциональная схема блока управления и коммутатора.
Устройство содержит коммутатор , источник 2 напряжения, элемент И-НЕ 3, элементы И 4-8, элемент ИШ-НЕ 9, элементы К) и 11 задержки, датчик 12 тока пороговый элемент 13, блок 14 приводов манипулятора, привода 15-22 датчики 23-30 положения, блок 31 управления, блок 32 датчиков положения манипулятора, первый инвертор 33,
В блок управления и коммутатор входят счетчик 34, дешифраторы 35-49 второй инвертору50, элементы ИЛИ 51- 55 триггеры 56-60, ключи 61-69, интегратор 70, ждущие мультивибраторы 71-81, выключатели 82 и 83, источник 84 опорного напряжения.
Устройство работает следугоп{им образом.
В исходном положении первьш и второй схваты манипулятора раскрыты и расположены у выходов двухручьевого вибробункера, который формирует два потока ориентированных заготовок, заготовки в каждом из н;ор- мально зажаты приводами 15 и 16 при- .жимов вибробункера, вибробункер находится в рабочем состоянии. Заготовки на выходах вибробункера отсутствуют при этом, лучи фотодатчиков 25 и 26 выходов вибробункера не прерва- нь1 и с выходов фотодатчиков 25 и 26 поступают единичные сигналы на вторые входы элементов И 5 и 6. Последовательность выполнения операций в робототизированном комплексе определяется структурой блока 31 управления, который поочередно своими: выходными сигналами при помощи коммутатора 1 включает в рабочий режим приводы 15-22 и 14 технологического обору дования и манипулятора.
Блок 31 управления работает следующим образом.
.
В момент подключения источника 2 питания выключателем 83 счетчик 34 устанавливается в ноль при помощи инвертора 50, интегратора 70, источни- 5 ка 84 опорного напряжения. Для этого в момент подключения источник 84 по-, дает на вход интегратора 70 постоянное напряжение, которое интегрируется интегратором 70. На выходе последнего сначала имеет место нулевое напряжение, которое инвертируется инвертором 50 и в виде логической единицы поступает на вход установки счетчика 34 в ноль. Счетчик 34 устанавливается в исходное состояние. После окончания интегрирования на выходе интегратора 70 появляется напряжение логической единицы, которое инвертируется инвертором 50 в логический ноль
10
(5
20
и не препятствует работе счетчика
34. После нажатия выключателя 82 замыкается триггер 60,. последний своим выходным импульсом через элемент ИЛИ 51 записывает единицу в счетчик 34. На выходе дешифратора 35 возникает логическая единица, которая поступает на управляющий вход ключа 61 коммутатора 1. Ключ 61 соединяет выход источника 2 напряжения с входами
элементов И 5 и 6. Это напряжение проходит через элементы И 5 и 6, так как на их других входах присутствуют единичные сигналы, и пост-упает на приводы 15 и 16 прижимов вибробункера. Прижимы вибробункера отпускают головные заготовки, которые выталкиваются к выходам вибробункера. По достижении выхода одной из заготовок луч соответствующего фотодатчика 25
и 26 прерывается, с выхода фoтoдatчи- ка 25 или 26 начинает поступать нулевой сигнал на соответствующий элемент И 7 шти 8. Тем самым прерывается управляющий сигнал с первого выхода коммутатора I и соответствующий привод 15 или 16 лрижима перестает действовать, что вызывает остановку соответствующего ручья. Таким образом обеспечивается поштучная выдача
на выход вибробункера заготовок, ориентированных определенным образом. Ориентация заготовок осуществляется при помощи механи еских устройств, имеющихся в каналах вибробункера.
-iS
Второй канал поштучной выдачи заготовок работает аналогичным образом. Если на двух выходах йибробункера присутствуют одновременно заготовки.
то нулевые сигналы фотодатчиков 25 и 26, .поступающие на входы элемента ИЛИ-НЕ 9, формируют на ее выходе единичный сигнал, служащий ответом на исполнение команды блока 31 управления. Если происходит сбой в работе одного из-каналов поштучной выдачи заготовок, то на выходе блока 9 еди- ничньй сигнал не формируется и работа комплекса блокируется, что предотвращает возможность поломки механических частей. В случае нормальной работы ответный сигнал с выхода блока 9 поступает на седьмой вход блока 31 управления, т.е. на вход ждущего мультивибратора 77. Последний вырабатывает импульс с уровнем логической единицы, который через блок 51 поступает на вход счетчика 34. На выходе счетчика 34 появляется код (число 2). В результате логическая единица на выходе дешифратора 35 сменяется логическим нулем, а на выходе дешифратора 36 появляется логическая единица, которая устанавливает триггер 56 в единичное состояние. Триггер 56 сигналом своего прямого выхода открывает ключ 62 и тем подключает источник 2 питания к электрообмотке привода схвата манипулятора блока 14. После поступления команды схваты манипулятора закрываются и зажимают заготовки, высовывающиеся из выходов вибробункера. Заготовки, как и схваты манипулятора, разнесены относительно друг друга на расстояние, равное расстоянию между центрами шпинделей станка. После выполнения команды Зажать схваты блок 32 датчиков положения манипулятора со своего первого выхода вьщает единичный сигнал на вход блока 31 управления. После этого с выхода ждущего мультивибратора 71 через блок 51 на вход счетчика 34 поступает единичный импульс, который устанавливает на выходе счетчика 34 код (число 3), в результате появления которого на выходе дешифратора 37 возникает сигнал логической единицы. Этот сигнал с выхода дешифратора 37 через элемент ИЛИ 52 поступает на первый вход триггера 57 и устанавливает его в единичное состояние. Сигналом со своего прямого выхода .триггер 57 открьгоает ключ 63 и подключает источник 2 к второму входу блока 14 приводов манипулятора После этого выполняется команда пово
рота схватов со штангой манипулятора вправо. При повороте заготовки извлекаются из выходов вибробункера. После вьтолнения команды поворота блок
32 датчиков положения манипулятора со своего второго выхода вьщает единичный сигнал, который поступает на вход ждущего мультивибратора 72. Импульс с выхода мультивибратора 72 че- рез блок 51 поступает на счетньй вход счетчика 34 и устанавливает на выходе последнего код (число 4). На выходе дешифратора 38 появляется единичный сигнал, который поступает на
первый вход триггера 58. На прямом выходе последнего устанавливается логическая единица, которая открывает ключ 64, соединяющими источник 2 с входом блока 14 приводов манипулятора. В результате вьшолняется команда вьщвижения руки манипулятора. После вьтолнения этой команды заготовки, зажатые в схватах, оказываются расположенными напротив цанг патронов станка. Ответ о вьтолнении данной команды с третьего выхода блока 32 поступает на третий вход блока 31, после чего на выходе ждущего мультивибратора 73 возникает единичный импульс, которьй проходит через блок 51 на вход счетчика 34 и устанавливает на его выходе код (число 5). На выходе дешифратора 39 появляется единичный сигнал, который через элемент ИЛИ 53 поступает на первый вход триггера 59. Последний своим прямым выходом открывает ключ 65 и тем самым подключает источник 2 с приводами 19 и 20 педалей станка. При этом
напряжение источника через датчик 12 тока включает привод 15 первой педали станка, тем самым раскрывается первая цанга станка. Мощные приводы 19 и 20, выполненные на электромагнитах переменного тока, не должны
включаться одновременно, так как суммарный пусковой ток может вывести из строя источник 2 питания и подводящие цепи. Последовательное же их
включение снижает быстродействие все- го комплекса.
Для повьш1ения быстродействия и обеспечения одновременно надежиобти устройства напряжение, подаваемое иа привод 20 второй педали, сиачапа задерживается на малое время элементом 10 задержки, а затем поступает на первый вход элемента И 8, Если
ток, потребляемый приводом 19 первой педали, прошел пусковую стадию и достиг своего номинального значения, то сигнал с второго выхода датчика 12 тока приводит к срабатыванию порогового элемента 13, единичный в- ходной сигнал которого поступает на вход элементов И 8. Таким образом, выходное напряжение элемента 8 включает привод 20 второй педали еще во время работы привода 19, но после прекращения потребления им пускового тока. По окончании вьтолнения команды Цанги разжать выходные сигналы датчиков 27 и 28 положения приводов 19 и 20 первой и второй педалей станка поступают на первый и второй входы блока 7. Если обе цанги разжались то на выходе блока 7 появляется единичный сигнал, являющийся. ответом на выполнение команды Разжать дан- ги, которая поступает на вход блока 31 управления. Этот вход блока 31 является входом ждущего мультивибратора 78, который в момент поступления на его вход высокого уровня напряжения на своем выходе формирует импульс с уровнем логической единицы, который через блок 51 поступает на вход счетчика ЗА и устанавливает на его выходе код (числр 6) , На выходе дещифратора 40 появл;яется единичный сигнал, который через элемент РШИ 54 поступает на вход триггера 57 и устанавливает последний в начальное положение. При этом ключ 63 закрывается и обесточивает привод поворота манипулятора вправо. Триггер 57 своим инверсньм выходом открывает кгаоч 66, который подключает к источнику 2 питания привод поворота манипулятора влево. После вьшолнения этой команды заготовки деталей, зажатые в схватах, встают на рабочие позиции в патроны станка. Ответом о выполнении данной команды служит сигнал, который поступает с выхода блока 32 на вход блока 31 управления, В результате на выходе счетчика 34 устанавливается код (число 7), а на выходе дешифратора 4 появляется сигнал, который через элемент ИЛИ 55 поступает на второй вход триггера 59, который устанавливается после этого в нулевое состояние.
Ключ 65 закрьгоается и отключает источник 2 от приводов 17 и 18 цанг, цанги станка сжимаются, на выходах
0
5
0
5
датчиков 23 и 24 появляется сигнал логического ноля,, который передается на вход инвертора 33 через элемент И 7, На выходе инвертора 33 появляется сигнал логической единицы, который затем поступает на вход ждущего мультивибратора 79, и который является ответом на вьтолнение команды Сжать цанги. Единичный импульс с выхода мультивибратора 79 через блок 51 поступает на вход счетчика 34 и устанавливает на его выходе код (число 8), На выходе дешифратора 42 появляется сигнал высокого уровня, который поступает на второй вход триггера 56 и устанавливает его в исходное состояние. В результате этого на выходе триггера 56 появляется нулевой сигнал, ключ 62 закрывается и отключает источник 2 от охвата манипулятора. Схваты манипулятора раскрываются и отпускают заготовки деталей, зажатые в патронах станка. Ответ о вьтолнении этой команды поступает с выхода блока 32 на вход блока 31, т,е. на вход ждущего мультивибратора 76, После этого на выходе счетчика 34 устанавливается код (число 9), на выходе дешифратора 43 появляется сигнал, который через второй вход элемента ИЛИ 52 поступает на первый вход триггера 57 и устанавливает последний в единичное состояние. Триггер 57 сигналом своего прямого выхода открывает ключ 63, что соответствует .повороту манипулятора вправо. После получения ответа о выполнении команды с выхода блока 32 на выходе счетчика ,34 устанавливается код (число 10). Дешифратор 44 своим выходным сигналом опрокидывает триггер 58 в начальное состояние, после чего ключ 64 закрывается, Инверсньм выходом
триггера 58 открывается ключ 67, который подключает источник 2 напряжения к входу блока 14 приводов манипулятора. При этом вьтолняется команда Задвинуть манипулятор. После вьтолнения команда: ответный сигнал с пятого выхода блока 32 записывает в счетчик 34 код (число П). Дешифратор 45 выходным сигналом через элемент ИЛИ 54 устанавливает триггер 57 в началь ное состояние, ключ 63 закрывается, а открывается ключ 66, и выполняется i команда Повернуть манипулятор влево , После вьшолнения команды и при0
0
0
хода ответного сигнала на вход счетчика 34 в нем устанавливается код (число 12). Дешифратор 46 выходным сигналом открывает ключ 68. В результате к выходу коммутатора 1 подключается напряжение источника 2. Это напряжение включает привод 21 второго суппорта, и после задержки элементом 11 включается привод 22 первого суппорта. Суппорты начинают перемещать резцы к заготовкам в цангах, а
патроны станка начинают вращаться. Задержка включения суппортов позволяет разнести во времени .моменты врезания резцов в заготовки и тем снизить суммарную пусковую механическую нагрузку на общий электропривод токарного полуавтомата. По окончании процесса обработки кулачковьм механизм станка возвращает суппорты в исходное положение, а связанные с ними датчики 29 и 30 положения приводов 21 и 22 первого и второго суппортов вьщают ответ о выполнении команды. При этом выходные сигналы датчиков 29 и 30 положения приводов суппортов 21 и 22 поступают на первый и второй входы элемента И-НЕ 3. Во время включения приводов 21 и 22 на выходах датчиков 29 и 30 появляются сигналы логической единицы, а на выходе элемента И-НЕ 3 присутствует сигнал логического нуля. После окончания процесса обработки и возврата суппортов в исходное положение на выходах датчиков 29 и 30 появляются сигналы логического нуля, а на элементе И-НЕ 3 соответственно появляется положи- тельньй фронт сигнала логической единицы, который воздействует на вход ждущего мультивибратора 80. В результате на выходе мультивибратора 80 возникает импульс сигнала, который через блок 51 поступает на вход счетчика 34. На выходе последнего устанавливается код (число 13), а на выходе дешифратора 37 появляет-;
ся сигнал, который поступает на второй вход элемента ИЛИ 53, выход которого соединен с первым входом триггера 59. Под действием сигнала с выхода дешифратора 37 триггер 59 устанавливается в единичное состояние и сигналом со своего прямого выхода открьгоает ключ 65. В результате выполнится команда Раскрыть цанги станка. По окончании выполнения команды Цанги разжать выходные сигна
5
0
5
0
5
0
5
0
5
лы датчиков 27 и 28 положения приводов 19 и 20 первой и второй педалей станка поступают на первый и второй входы элемента И 7. Если обе цанги разжались, то на выходе блока 7 появляется сигнал логической единицы, который поступает на вход ждущего мультивибратора 78, на выходе которого при этом формируется импульс, поступающий через блок 51 на вход счетчика 34 и устанавливающий на его выходе код (число 14). При этом на выходе дешифратора 48 появляется сигнал, который открывает ключ 69. Последний соединяет источник 2 напряжения с входами приводов 17 и 18 первого и второго пневмоклапанов. Пневмоклапа- ны подключают пневмосеть к внутренним полостям патронов станка. В результате этого обработанные детали выдуваются из цанг вместе со стружкой и падают в приемные лотки. Сигналы с фотодатчика 23 первой цанги и фотодатчика 24 второй цанги, сигнализирующие об отсутствии деталей в патронах станка, поступают на входы элемента И 4. Выходной единичный сигнал блока 4, поступающий на вход ждущего мультивибратора 81, является ответом об исполнении выдува деталей из цанг. После получения ответа в счетчике 34 устанавливается код (число 15). На выходе дешифратора 49 появляемся сигнал, который через элемент ИЛИ 55 устанавливает триггер 59 в начальное состояние, в результате чего ключ 65 закрывается. Источник 2 напряжения отключается от приводов цанг, цанги сжимаются, а на выходах датчиков 27 и 28 появляется сигнал логического нуля, которьй с выхода блока 7 поступает на вход инвертора 33. Положительный фронт сигнала на выходе инвертора 33 воздействует на вход мультивибратора 79. Ждущий мультивибратор 79 формирует сигнал, который является ответом на вьтолнение команды Сжать цанги. Единичный импульс с выхода мультивибратора 79 через блок .51 поступает на вход счетчика 34 и устанавливает на его выходе код (число 0). Одновременно на пятом выходе счетчика 34 появляется импульс переполнения, который через блок 51 поступает на счетный вход счетчика 34 и устанавливает в счетчике 34 код (число 1). После этого цикл работы устройства повторяется.
Формула изобретения
1. Устройство для управления ро- бототизированным комплексом, содержащее восемь приводов и блок управления , выходы которого соединены с соответствующими первымивходами коммутатора, подключенного вторым входом к выходу источника питания, а первыми выходами к входам блока приводов манипулятора, отличающееся тем, что с целью повышения быстродействия и надежности устройства, оно содержит датчик тока, пять элементов И, восемь датчиков положения, элемент И-НЕ, элемент ИЛИ-НЕ, первый инвертор, два элемента задержки и блок датчиков положения манипулятора, выходы которого соединены с первыми входами блока управления, подключенного вторым входом к выходу первого элемента И, первый и второй входы которого соединены соответст- , венно с выходом первого и второго датчиков положения, второй выход коммутатора подключен к первым входам второго и третьего элементов И, подключенным выходом к входу соответственно первого и второго приводов, а вторым входом к выходу соответственно третьего и четвертого датчиков положения и первому и второму входам элемента КПИ-НЕ, выход которого соединен с третьим входом блока управления, третий выход коммутатора подключен ко входу третьего и четвертого приводов, а четвертый выход - к входу первого элемента задержки и через последовательно соединенные датчик тока, пятый привод и пятый датчик положения к первому входу четвертого элемента.И, второй выход датчика тока через пороговый элемент соединен с первым входом пятого элемента И, второй вход которого подключен к выходу первого элемента задержки, а выход - к входу жесткого привода, связанного через датчик положения с вторым входом четвертого элемента И, соединенного выходом непосредственно с четвертым входом блока управления и через первый инвертор с пятым входом блока управления, пятый выход коммутатора подключен к входу второго элемента задержки и через последовательно соединенг-тые .седьмой привод, седьмой датчик положения и элемент И-НЕ с шестым входом
блока управления, а выход второго элемента задержки через последовательно подключенные восьмой привод и восьмой датчик положения соединен с вторым входом элемента И-НЕ.
2. Устройство по П.1, отличающееся тем, что блок управления содержит первый выключатель,
пять триггеров, пять элементов ИЛИ, пятнадцать дешифраторов, одиннадцать ждущих мультивибраторов и последовательно соединенные источник опорного напряжения, второй выключатель, интегратор, второй инвертор и счетчик, второй вход которого подключен к выходу первого элемента ИЛИ, а первые .выходы - к соответствующим входам всех дешифраторов, выход второго дешифратора соединен с первым входом первого триггера, подключенного вторым входом к выходу восьмого дешифратора, выход третьего дешифратора соединен с первым выходом второго элемента ИЛИ, второй вход которого подключен к выходу девятого дешифратора, а выход - к первому входу второго триггера, выход четвертого дешифратора соединен с первым входом третьего
триггера, подключенного вторым входом к выходу десятого дешифратора, выход пятого дешифратора соединен с первым входом третьего элемента ИЛИ, второй вход которого подключен к выходу три
надцатого дешифратора, а выход - к
первому входу четвертого триггера, выход шестого дешифратора соединен с первым входом четвертого элемента ИЛИ, подключенного вторым входом к
выходу одиннадцатого дешифратора, -а выходом к второму входу второго триггера, выход седьмого дешифратора соединен с первым входом пятого элемента ИЛИ, второй вход которого подключен к выходу пятого дешифратора, а выход - к Второму входу четвертого триггера, выход первого дешифратора, выход первого триггера, первый и второй выходы второго триггера, первый и второй выходы третьего триггера, выход четвертого триггера, выход двенадцатого дешифратора и выход четырнадцатого дешифратора соединены с соответствуюшзнми выходами блока управления, выход каждого ждущего мультивибратора подключен к соответствующему первому входу первого элемента ИЛИ, второй вход которого соединен с вторым выходом счетчика, я
третий вход - с выходом пятого триг - гера, подключенного входом к первого выключателя, первые входы блока управления с входами первых шести ждущих мультивибраторов, а вто-
- 5
12 78. 0312
рой, третий, четвертый, пятьтй и шестой входы - с входами одиннадцатого, седьмого, восьмого, девятого и десятого ждущего мультивибратора соответственно.
Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОБЪЕКТОВ | 1992 |
|
RU2065569C1 |
| Система бесперебойного питания | 1990 |
|
SU1807546A1 |
| Устройство для контроля электромагнита | 1986 |
|
SU1388832A1 |
| Устройство для контроля состояния технических объектов | 1983 |
|
SU1156011A1 |
| Устройство управления паровоздушным молотом | 1983 |
|
SU1131584A1 |
| Агрегат гарантированного питания | 1990 |
|
SU1742942A1 |
| Устройство для управления электромагнитом | 1989 |
|
SU1665413A1 |
| Система селективного вызова | 1985 |
|
SU1309330A1 |
| Способ управления предохранительным торможением шахтной подъемной машины и устройство для его осуществления | 1988 |
|
SU1640093A1 |
| Устройство для управления манипулятором | 1982 |
|
SU1041986A1 |
Изобретение относится к области робототехники и может быть использовано при создании робототизированных комплексов. Цель изобретения - повышение быстродействия за счет обеспечения параллельной работы приводов, а также повышение надежности устройства за счет обеспечения контроля выполнения команд. Для этого в устройство дополнительно введеиы четьфе датчика положения приводов, четыре фотодатчика, датчик тока, пороговый элемент, две линии задержки и логические схемы. 1 з.п. ф-лы, 2 ил. с S
Редактор Е.Папп Заказ 6796/15
Составитель Е.Политов Техред В.Кадар
Корректор И.Муска Подписное
Тираж 1031 ВНЮПТИ Государственного комитета СССР
по целам изобретений и открытии ,5 П3035, Москва. Ж-35, Раушская на6. .Д.5
Гг. Ужгород, ул. Проектная, 4
Производственнс
:у полиграфическое предприятие,
Корректор И.Муска Подписное
| Фрикционная муфта | 1977 |
|
SU672400A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Устройство для управления манипуляторами | 1978 |
|
SU746419A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
