Изобретение относится к шахтному подъему, а именно к системам управления тормозами шахтных подъёмных машин с
Цель изобретения - повышение, безопасности и надежности предохранительного торможения.
На фиг,1 изображены временные диаграммы; на фиг 2 - функциональная схема устройства для. осуществления способа.
Устройство содержит датчик 1 замедления, первый 2 и второй 3 дифференциаторы, первый детектор 4 нуля, состоящий из резистора 5 и операционного усилителя 6, первый 7 и второй 8 ждущие мультивибраторы, элемент ИЛИ 9, второй детектор 10 нуля, состоящий из резистора 11 и операционного усилителя 12, первый задат- чик 13, блок 14 сравнения, состоящий из резистора 15, операционного усилителя 16 и диода 17, счетный триггер 18, первый контакт 19 предохранительного торможения, первый 20 и второй 2Т управляемые ключи, задат- чик 22 закона изменения тормозного усилия и устройство 23 выборки-хранения, Задатчик 22 состоит из резисторов 24 и 25, диода 26, конденсатора 27, операционного усилителя 28. На фиг.2 изображены также второй контакт 29 контактора предохранительного торможения, усилитель 30 мощности, регулятор 31 давления, тормозной цилиндр 32, второй задатчик 33 и сумматор 34.
При данном способе управления предохранительное торможение подъемной машины осущестляется следующим образоМо
Задатчиком 13 задают величину базисного замедления„ После подачи команды на предохранительное торможение задатчик 22 закона изменения тормозного усилия начинает работать и на его выходе появляется линейно изменяющееся напряжение (U8b(xzz(t), фиг,,) - команда на изменение тормозного усилия Эта команда усиливается и подается на обмотку регулятора 31 давления, который по этому же закону уменьшает давление рабочего тела в тормозном цилиндре 32, тем самым наращивают тормозное усилие, прикладываемое к барабану машины. Как следствие, нарастает замедление барабана (-U8blx, фиг01) (отрицательная полуволна фактического замедления Ua,..
ВЫХ
соответствует ускорению машины во время холостого хода тормоза при
спуске груза)„ Рост тормозного усилия продолжают до появления-первого максимума первой производной от фактического замедления (UBbl 2,фиг. 1) . По достижении указанного максимума
начинают снижение тормозного усилия заданным темпом (U 8ь(Х2,фиг. 1) . Снижение проводят до момента появления экстремума в кривой замедления машины (UBh(M, фиг.1)4т.е. до момента изменения1 знака производной (ивьп(г,
фиг.1), Далее вновь начинают наращи- вание тормозного усилия, продолжающееся -до момента наступления очередного максимума первой производной
0 от замедления машины, после чего опять начинают уменьшать тормозное усилие и т„д. После достижения фактическим замедлением заданного базисного уровня прекращают наращивание
5 тормозного усилия и тормозят машину достигнутым усилием с заданным замедлением.
Устройство, реализующее данный способ работает следующим образом.
0 При замкнутой цепи защиты установки (машина заряжена) контакты 19 и 29 замкнуты, триггеру 18 на установочный вход подается сигнал логической единицы и он находится в исходном единичном состоянии (на неивертирую- щем выходе существует сигнал логической единицы). У задатчика 22 закорочена обратная связь, его выходное напряжение равно нулю, также как
0 выходное напряжение усилителя 30
мощности. К обмотке управления регулятора 31 давления приложено выходное напряжение задатчика 33, соответствующее максимальному давлению в с тормозном цилиндре 32, т.е„ расторможенному состоянию машины.
При подаче команды на начало предохранительного торможения контакты 19 и 29 контактора предохранительного торможения размыкаются, триггер 18
5
0
5
остается в исходном состоянии, а вход задатчика 22 подключается к плюсу источника питания, выходное напряжение задатчика 22 линейно изменяется в области отрицательных величине Поскольку фактическое замедление меньше заданного с помощью задатчика 13, устройство 23 выборки- хранения работает с режиме выборки,
т.во повторяет на своем выходе выходное напряжение задатчика 22, которое затем усиливается усилителем 30 и суммируется с напряжением задатчика 33, соответствующим расторможенному состоянию машины, т.е. максимальному давлению в тормозном цилиндре 32.
Таким образом, по мере линейного изменения выходного напряжения задатчика 22 выходное напряжение сумматора 34 уменьшается, начиная с величины напряжения задатчика 33 по тому же линейному закону и, соответственно, уменьшается давление в тормозном цилиндре 32, а значит, возрастает тормозное усилие о Рост тормозного усилия продолжается до момента появления максимума в напряжении, пропорциональном первой производной от замедления машины на выходе дифференциатора 2
Этот максимум определяется по второй производной от замедления на выходе дифференциатора 3 с помощью детектора 4 нуля - максимуму соответствует задний фронт выходного напряжения детектора 4 нуля, из которого ждущим мультивибратором 7 формируется импульс, поступающий на вход элемента ИЛИ 9 и с его выхода на счетный вход триггера 18. При этом триггер 18 перебрасывается, на его инверсном выходе появляется сигнал 1 (соответственно на прямом выходе - сигнал О), управляемый ключ 21 замыкается, а ключ 20 размыкается, вход задатчика
22 оказывается соединенным с минусом источника питания, выходное напряжение задатчика 22 начинает линейно нарастать и соответственно, растут напряжение на выходе сумматора 34 давление в тормозном цилиндре 32, а следовательно, уменьшается тормозное усилие, прикладываемое к барабану машины.
Уменьшение усилия длится до момента изменения знака первой прозвод- ной от замедления (напряжения на выходе дифференциатора 2} на противоположный (отрицательный). Этот момент соответствует заднему фронту выходного напряжения детектора 10 нуля. Из заднего фронта ждущим мультивибратором 8 формируется импульс, ко- торый через элемент ИЛИ 9 подается на тактовый вход триггера 18„ Послед- ний перебрасывается, на его неинвертирующем выходе появляется сигнал t
ключ 20 замыкается, а ключ 21 размы- каетсЯо Вход задатчнка 22 подключается к плюсу источника питания, и вновь начинается рост тормозного усилия Таким образом производится управление величиной тормозного усилия до тех пор, пока заданное базисное замедление (с выхода задатчика
13) не станет равным фактическому (с выхода датчика 1). В момент наступления равенства срабатывает блок 14 сравнения. На его выходе исчезает напряжение, и устройство 23-выборкихранения переходит в режим хранения, т.е. напряжение на обмотке управления регулятора 31 давления, а значит, и тормозное усилие остается на заданном уровне. Машина тормозится до
полной остановки с заданным замедлением о
Формула изобретения
1. Способ управления предохранительным торможением шахтной подъемной машины, при котором задают величину базисного замедления, тормозное усилие изменяют во времени, измеряют
замедление машины, сравнивают его с базисным, при достижении которого прекращают изменение тормозного усилия и тормозят машину достигнутым тормозным усилием с заданным замедлением, отличающийся тем,
,что, с целью повышения безопасности
0
е
и надежности предохранительного торможения, тормозное усилие с момента подачи команды на предохранительное торможение наращивают до появления первого максимума первой производной от замедления на отрицательный, причем процесс наращивания и снижения тормозного усилия повторяют до с достижения замедлением машины базисного.
2о Устройство управления предохранительным торможением шахтной подъемной машины, содержащее источник питания, первый задатчик, соединенный с первым входом блока сравнения, усилитель мощности, сумматор, первый вход которого соединен с вторым задатчиком, а выход - с регулятором давления, выход которого соединен с тормозным цилиндром, отличающееся тем, что, оно снабжено датчиком замедления, двумя дифференциаторами, двумя детекторами нуля,
0
двумя ждущими мультивибраторами, -элементом ИЛИ, устройством выборки- хранения, задатчиком закона изменения тормозного усилия, двумя управляемыми ключами, счетным триггером, контактами контактора предохранительного торможения, причем датчик замедления соединен с вторым входом блока сравнения и входом первого дифферен- циатора, выход которого через последовательно соединенные второй дифференциатор, первый детектор нуля и первый ждущий мультивибратор соединен с первым входом элемента ИЛИ, второй вход которого через последовательно соединенные второй ждущий мультивибратор и второй детектор нуля соединен с выходом первого дифференциатора, а выход - с тактовым входом счетного триггера, вход установки в единичное состояние которого
через первый контакт контактора предохранительного торможения подключен к источнику питания, прямой выход - к управляющему входу первого управляемого ключа, а инверсный выход - к управляющему входу второго управляемого ключа, первый и второй входы задатчика закона изменения тормоного усилия соответственно через первы и второй управляемые ключи подключены к положительной и отрицательной клеммам источника питания, выход задатчика закона изменения тормозного усилия соединен с первым входом устройства выборки-хранения, второй вход которого соединен с выходом, блока сравнения, а выход через усилитель мощности - с вторым входом сумматора и через второй контакт контактора предохранительного торможения - с третьим своим входом.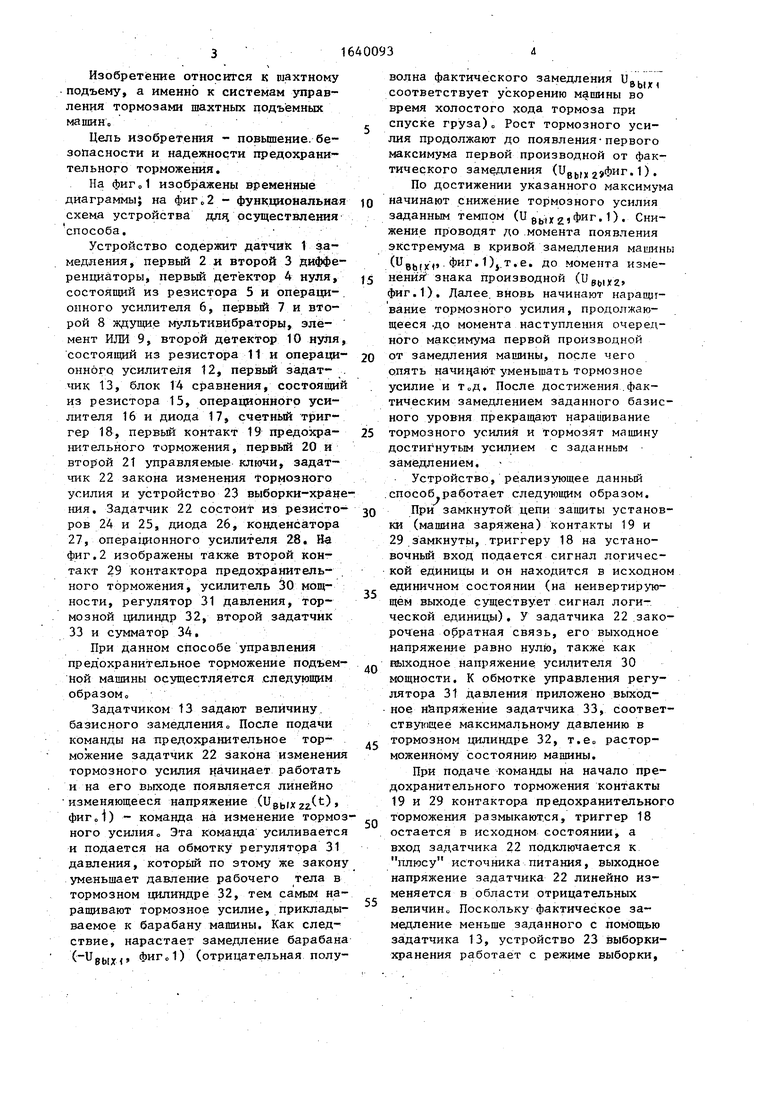
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления тормозом шахтной подъемной машины | 1989 |
|
SU1757981A1 |
| Устройство для управления тормозом шахтной подъемной машины | 1989 |
|
SU1717513A1 |
| Устройство для управления тормозом шахтной подъемной машины | 1985 |
|
SU1379216A1 |
| Устройство для управления тормозом шахтной подъемной машины | 1988 |
|
SU1652267A1 |
| СПОСОБ ЗАЩИТЫ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ ОТ НАБЕГАНИЯ ГРУЖЕНЫХ ПОДЪЕМНЫХ СОСУДОВ НА ТЯГОВЫЕ КАНАТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ЗАЩИТА Н.Г.ОГНЕВА) | 1994 |
|
RU2104243C1 |
| Устройство для управления предохранительным торможением подъемной установки | 1975 |
|
SU753761A1 |
| Устройство управления тормозом шахтной подъемной машины | 1988 |
|
SU1583342A1 |
| Устройство контроля параметров регулируемого предохранительного торможения подъемной машины | 1990 |
|
SU1798284A1 |
| Устройство управления тормозом шахтной подъемной машины | 1986 |
|
SU1404450A1 |
| Устройство для предохранительного торможения шахтной подъемной машины | 1988 |
|
SU1680615A1 |
Изобретение относится к шахтному подъему и предназначено для управления тормозами шахтных подъемных машин. Цель изобретения - повышение безопасности и надежности предохранительного торможения. Для этого за- цатчиком 13 задают величину базисного замедления.После команды на предохранительное торможение задатчиком 22 заС кона изменения тормозного усилия (ТУ) формируют команду на изменение во времени ТУ. Эта команда отрабатывается усилителем 30 мощности, сумматором 34, задатчиком 33 и регулятором 31 давления. В результате уменьшают давление рабочего тела в тормозном цилиндре 32, а тем самым наращивают ТУ, прикладываемое к барабану машины. При этом нарастает замедление машины, которое измеряют датчком 1 замедления. Увеличивают ТУ до достижения первого максимума первой производной от фактического замедления, который контролируют дешифратором 3 и детектором 4 нуля. По достижении указанного максимума ТУ снижают заданным темпом Причем снижение ведут до момента изменения знака первой производной замедления. Процесс наращивания и снижения ТУ повторяют до достижения замедлением машины базисного , После этого тормозят машину достигнутым ТУ с заданным замедлением. 2 о.Ноф-лы, 2 ил„ О $ (Л с со io 18 Л 19 21
П П | П п П п I I
I | р ш И ilii Г ill it i ii i
и«ы1.
LL
| Способ предохранительного торможения шахтного подъемника и устройство для его осуществления | 1978 |
|
SU763229A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
