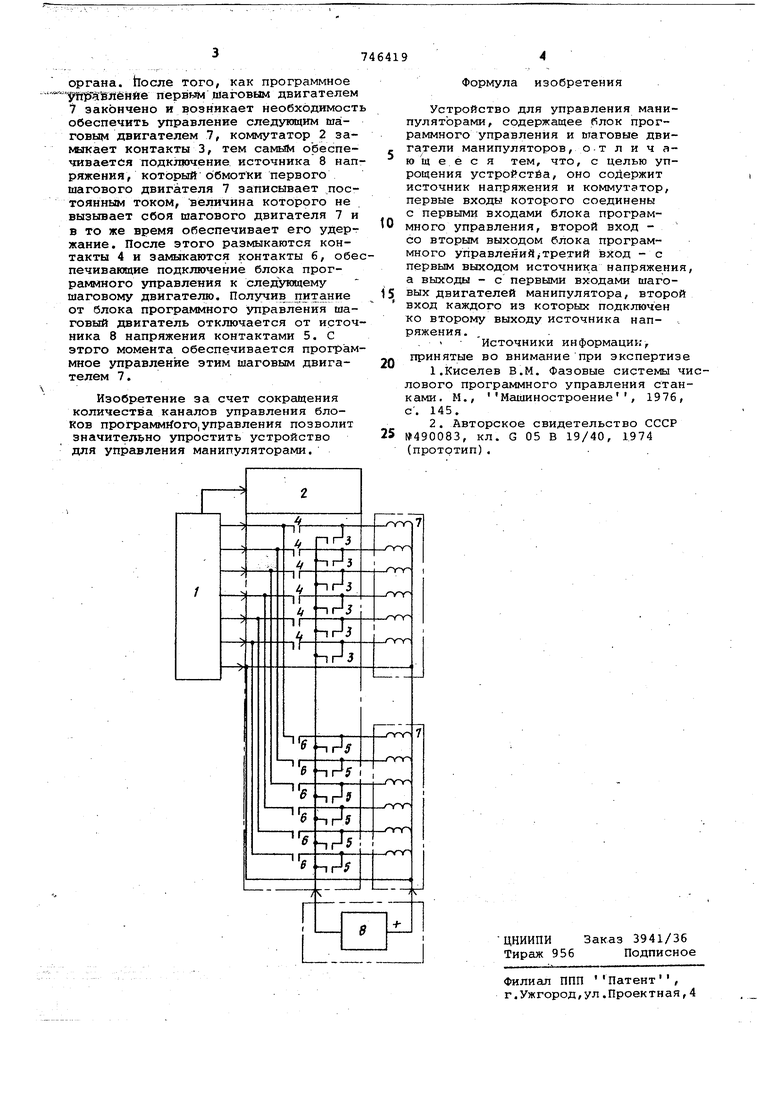
Изобретение относится к области программного управления многокоординатными устройствами, может быть использовано при управлении движением рабочих органов манипуляторов, например, при электродуговой сварке металлов . Известно устройство для управлени манипуляторами, которое содержит манипуляторы с исполнительными шаговыми двигателями и устройство числово.го программного управления, обеспечивающее управление манипуляторами только в случае, если число управляемых координат устройства управления больше или равно числу исполнительны приводов манипуляторов f 1J . . Известно также устройство, содержащее блок программного управления и . числовые двигатели, манипуля- ; торов 2. Недостатком известного устройства является то, что при последовательном управлении несколькими манипуляторами или их исполнительными приводами известная система требует устройства управления, число управляемы координат которого больше или равно числу исполнительных приводов манипуляторов, что усложняет систему. Целью изобретения является упрощение устройства. Это достигается тем, что устройство содержит источник напряжения и коммутатор, первые входы которого соединены с первыми выходами блока программного управления, второй выход коммутатора подключен ко второму выходу блока программного управления, третий вход - к первому выходу источника напряжения, а выходы коммутатора соединены с первыми входами шаговых двигателей, второй вход каждого из которых подключен ко второму выходу источника напряжения. На чертеже изображена ,функционад1ьная схема устройства для управления манипуляторами. Устройство содержит блок 1 программного управления, коммутатор 2, контакты 3-6 коммутато-. ра,шаговые двигатели 7 манипуляторов, источник 8 напряжения. Устройство работает следующим образом. При программном управлении шаговым двигателем 7 контакты 4 коммутатора 2 замкнуты и исполнительный двигатель 7 манипулятора по программе блока программного управления обеспечивает перемещение рабочего
органа. Ьосле того, как программное р1да1«ёййе первым mairoBHM двигателем 7 закончено и возникает необходимость обеспечить управление следующим шаговым двигателем 7, коммутатор 2 замыкает контакты 3, тем самым обеспечивается подключение источника 8 напряжения, который обмотки первого шагового двигателя 7 записывает постоянным током, величина которого не вызывает сбоя шагового двигателя 7 и в то же время обеспечивает его удержание. После этого размыкаются контакты 4 и замыкаются контакты б, обеспечивающие подключение блока программного управления к следующему шаговому двигателю. Получив питание от блока программного управления шаговый двигатель отключается от источника 8 напряжения контактами 5. С этого момента обеспечивается программное управление этим шаговым двигателем 7.
Изобретение за счет сокращения количества каналов управления блоков программного, управления позволит значительно упростить устройство для управления манипуляторами.
Формула изобретения
Устройство для управления манипуляторами, содержащее блок программного управления и ьтаговые двигатели манипуляторов, о т л и ч аю щ ее с я тем, что, с целью упрощения устройстйа, оно содержит источник напряжения и коммутатор, первые входы которого соединены с первыми входами блока программного управления, второй вход со вторым выходом блока программного управленийjтретий вход - с первым выходом источника напряжения, а выходы - с первыми входами шаговых двигателей манипулятора, второй вход каждого из которых подключен ко второму выходу источника напряжения. - Источники информации,
принятые во внимание при экспертизе
1 .Киселев В.М. Фазовые системы числового программного управления станками. М., Машиностроение, 1976, с . 145.
2. Авторское свидетельство СССР 5 №490083, кл. G 05 В 19/40, 1974 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая система программного управления роботом-манипулятором | 1979 |
|
SU943644A1 |
| Шаговая система программного управления манипулятором | 1978 |
|
SU746433A1 |
| Шаговая система программного управления многокоординатным манипулятором | 1977 |
|
SU644617A1 |
| Устройство для управления автоматической сменой заготовок на токарных станках с числовым программным управлением | 1985 |
|
SU1275374A1 |
| Устройство для определения деформаций горных пород | 1983 |
|
SU1209856A1 |
| Устройство для программного управления процессом обработки изделий микроэлектроники | 1986 |
|
SU1386962A1 |
| Копировальное следящее устройство для станков с программным управлением | 1982 |
|
SU1070508A1 |
| Линейный интерполятор для цифровых двухкоординатных систем програмного управления | 1973 |
|
SU499555A1 |
| Устройство для программного управления | 1980 |
|
SU920637A1 |
| Система числового программногоупРАВлЕНия элЕКТРОэРОзиОННыМ CTAHKOM | 1979 |
|
SU798723A1 |
