Предлагаемое изобретение предназначено для последовательного ориентирования аэроснимков без предварительной геодезической подготовки местности в пределах пунктов второклассной тригонометрической сети.
Для определения положения камеры в начале фотографирования необходимо знать положение трех пунктов в плане и их высоты, т.е. координаты XYZ. При ориентировании дальнейших снимков необходимо сделать измерение шести независимых величин на обоих негативах совместно, для отыскания неизвестных элементов, определяющих взаимное положение камер (трех линейных и трех угловых).
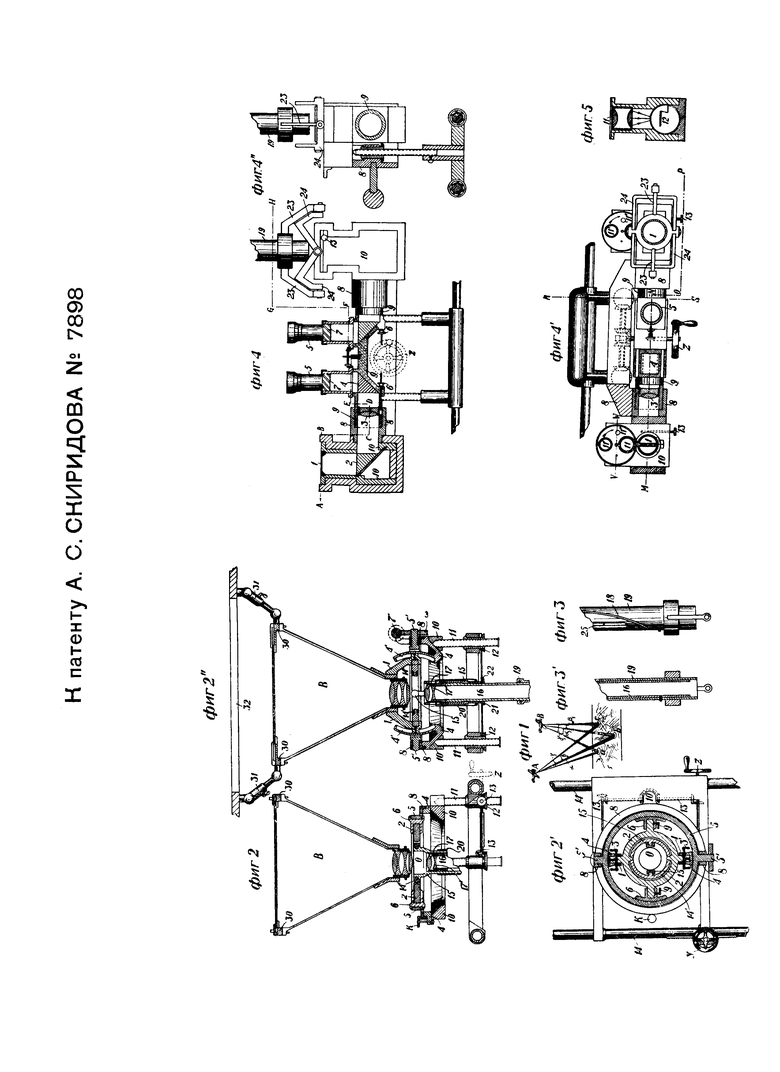
На фиг. 1 изображены два последовательных положения аэроплана, производящего съемку; на фиг. 2, 2′ и 2′′ - разрез ориентировочного столика в трех проекциях; на фиг. 3 - деталь трубы прибора; на фиг. 3′ - эта же деталь в разрезе; на фиг. 4 - разрез наблюдательной системы по линии MNOP фиг. 4′; на фиг. 4′ - разрез той же системы по линии ABODEFGH фиг. 4; на фиг. 4′′ - разрез по линии RS фиг. 4′, и на фиг. 5 - разрез по линии VW фиг. 4.
Точки местности а, b, c сфотографированы дважды из точек А и В, представляющих последовательные положения самолета. Углы α β γ и α1 β1 γ1 закреплены фотографически и, следовательно, не могут быть изменены при вращении фотокамер относительно плоскости проекций, а потому для ориентирования фотокамеры точки В относительно точки А достаточно совместить в пространстве пересечение трех лучей и площади фигур, лежащих в основании этих лучей.
Столик ориентирования (фиг. 2, 2′ и 2′′) предназначен для перемещения камеры по осям XYZ и вращения ее вокруг точки О, которая лежит около передней главной точки объектива. Камера В укреплена на раме 1. Поворотом ключей 3 и 3′ с эксцентриками рама 1 наглухо соединяется с кольцом 2 и получает возможность скользить в прорезах 4′ кольца 4. При вращении бесконечным винтом 7′ (фиг. 2′′) зубчатки ω при помощи кольца 5 и системы 6, камеру можно повернуть на требуемый угол, при чем кольцо 2 должно быть закреплено ключами 9. Затем обратным поворотом ключей 3,3′ камера соединяется с кольцом 4′ и кольцо 5 винтом 7 возвращается в прежнее положение, не вызвав при этом вращения камеры. Кольцо 5 вращается в цапфах кольца 8, которое в свою очередь скользит по кольцу 4, что дает возможность переместить ось вращения 5′, 5′ кольца 5 в плоскости XY в некоторое другое положение, параллельное заданной линии, вращением вокруг точки О. Во время вращения зубчатки ω ось 1,1 останется в вертикальной плоскости прорезей 4′, 4; поднимаясь или опускаясь в них, а кольцо 8 будет получать некоторое вращение вокруг вертикальной оси, проходящей через точку О, т.е. будет скользить по системе 4. При таком вращении ортогональная проекция негатива на плоскость будет перемещаться параллельно самой себе, и центральная проекция через главную точку объектива всякой точки негатива будет перемещаться на плоскости по прямым лучам, что и нужно при ориентировании. При помощи винта К, который соединяет кольцо 4 с кольцом 10, можно вращать камеру вокруг вертикальной оси, проходящей через точку О. Линейное перемещение камеры по оси Z достигается вращением маховичка Z, соединенного с вертикальными винтами 11, гайками 12 при помощи зубчатых соединений 13.
От маховичка У камера посредством зубчатки получает движение по оси У, перемещаясь по рельсам 14 каретки, которая в свою очередь может быть передвигаема по общей с другой камерой раме.
На кольце 2 имеется карданный подвес 14′, 15, позволяющий трубопроводу 16 вращаться вокруг точки О так, что телеобъектив 17, 17′ может быть направлен на любую точку негатива через объектив камеры. Фокусировка изображения негатива на плоскость проекций достигается тем, что труба 19, скользя по трубе 16, заставляет ее вращаться по кривой 18, а это вращение в свою очередь заставляет обойму 20 прямолинейно перемещаться по винтовой нарезке шайбы 21 вместе с выпуклой линзой 17, что изменяет положение фокальной плоскости телеобъектива. Фокусировка телеобъектива от руки производится вращением шайбы 21, после открепления винта 22.
Наблюдательная система (фиг. 4 и 4′) служит для одновременного наблюдения негативных картин двух камер и дли измерения относительных размеров изображений, которые проектируются на стеклянных матовых пластинках 1 с нанесенными шкалами и марками; эти действительные изображения, благодаря матовым стеклам, будут являться новыми светящимися картинами, которые при помощи призм 2 и 4 восьмикратного бинокля Цейсса и объектива 3 будут спроектированы в несколько уменьшенных размерах в фокальных плоскостях окуляров 5 также типа бинокля Цейсса. Помощью гайки 6 можно изменять положение объективов 3 и тем самым п увеличение наблюдательной системы, при чем окончательная фокусировка будет достигаться перемещением окуляров по червячному ходу 7. При наблюдениях обоими глазами одно изображение может быть повернуто относительно другого, так как камеры еще не ориентированы; для исправления подобных несовпадений изображений, необходимо повернуть окулярную систему 9 в пазах системы 8, отчего призмы 4 повернутся относительно призм 2, и изображения запрокинутся на двойной угол поворота. Винтами 13 шкалы пластинок 1 могут быть повернуты в нужное положение относительно изображений. Для подведения под трубы 19 телеобъективов диафрагм 11, сделанных тоже на матовом стекле, коробки 10 передвигаются в пазах системы 8. Свет от диафрагм 11, как от новых центров излучения, поступит в фотоэлементы 12 (фиг. 5) и возбудит слабые токи, которые после усиления будут наблюдаться работающим по двум гальванометрам. Диафрагмы 11 могут быть изменены диафрагмами 11′ или 11′′. Перемещение наблюдательной системы по оси Z достигается маховиком Z. По оси У и X перемещение производится от руки соответствующими маховиками. Передвигая наблюдательную систему в плоскости проекций негативных картин, необходимо перемещать и трубы 19, заставляя их повертываться на карданном подвесе 23, 24; при этом фокальные плоскости телеобъективов будут наклоняться относительно пластинок 1, что вызовет лишь незначительные круги рассеиваний на краях изображений, так как поле, подлежащее измерению по шкалам, приблизительно равно 1 см., а объектив может быть достаточно диафрагмирован и, кроме того, при наводке на штрих шкалы можно пользоваться шайбами 21.
Ориентирование снимка по трем точкам, когда даны их координаты XYZ, производится визуально последовательным соединением лучей с точками, которые получаются соответствующими установками наблюдательной системы на отсчеты XYZ.
При дальнейшем ориентировании одной камеры относительно другой нужно выбрать три отдельных фигуры (фиг. 1), например, выделяющиеся куски пашни, которые могут образовать два световых штатива: из точки А, которая известна, и из точки В, которая ищется. Условимся назвать через а′, b′, с′ фигуры в проекциях для камеры В и через а, b, с - для камеры А. Совместим а′, с, а перемещением камеры В по оси X и У, определим размеры а и а′ по шкалам пластинок 1 (фиг. 4) и, если размеры не совпадают, то, перемещая камеру В по оси Z и удерживая изображение а′ на марке по X и У, достигнем совпадения размеров фигур.
Визируем на вторую фигуру b и b′, перемещая наблюдательную систему по ХУ, и при этом получим, что точка b будет стоять на пересечении двух штрихов марки, а b′, находясь на вертикальном, может отодвинуться от горизонтального штриха. Измерим сечение фигуры b левым окуляром и, взяв отсчет со шкалы 25 трубопровода 19 (фиг. 2), переместим наблюдательную систему в новое положение, когда сечение фигуры b′ даст такой же размер, какой дала раньше фигура b, и снова берем отсчет со шкалы 25. По разности отсчетов со шкалы 25 и расстоянию от а′ до b′, которое может быть взято графически, определим угол поворота ω камеры В вокруг линии, перпендикулярной к а′, b′. Повернув столик, снова совместим а′ с а и, дойдя до b, получим равенство сечений фигуры b и b′, а затем, повернув несколько винт К (фиг. 2), добьемся совпадения фигур с марками. Визируем на третью фигуру с и с′; измеряем сечение с левым окуляром, берем отсчет со шкалы 25 и перемещаем наблюдательную систему до тех пор, пока сечение с′ будет равно полученному для с; опять берем отсчет со шкалы 25 и по разности этих отсчетов и расстоянию от е′ до линии а′ b′ находим угол поворота ω′ вокруг линии а′, b′, на который и поворачиваем столик. После нескольких последовательных совмещений фигур а, b, с с а′ b′, с′ получим одновременное их совпадание по размерам и положению. Точность решения будет зависеть от точности измерений сечений фигур а, а′, b, b′ и с, с′.
Если на негативах нельзя выбрать трех фигур для получения световых штативов, ориентирование может быть произведено тем же прибором и методом д-ра Грубера по совпаданию шести лучей, и хотя это решение в чистом виде будет недостаточно точно, но при комбинировании с методом штативов точность может быть повышена.
Для установки линейных элементов ориентирования нужно провизировать левым окуляром на одну из точек по координатам, размер которых для этой точки получен из предыдущего ориентирования, и передвинуть камеру В по XYZ, до совпадения марки с изображением. После ориентирорания. негатива камеры В прикладная рамка 30 (фиг. 2′′) закрепляется шарнирами 31 с доской 32, и негатив вместе с прикладной рамкой и доской передается на левую камеру А; на правую В ставится новая прикладная рамка с другим негативом, метки которого уже совмещены с метками рамки; когда ориентировано три негатива, то два из них с общей доской, относительно которой они ориентированы жесткими шарнирами могут быть переданы на прибор для автоматического печатания карт местности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения планового положения точек объекта и устройство для его осуществления | 1981 |
|
SU979852A1 |
| Фотограмметрический прибор | 1953 |
|
SU97218A1 |
| УНИВЕРСАЛЬНЫЙ СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ | 1973 |
|
SU382919A1 |
| Способ калибровки коноскопа поляризационного микроскопа | 1986 |
|
SU1354032A1 |
| Стереомоделятор | 1934 |
|
SU49283A1 |
| Монокомпаратор | 1982 |
|
SU1057783A1 |
| Способ построения пространственной геодезической сети в виде цепочки треугольников и угломерный прибор для его осуществления | 1986 |
|
SU1613858A1 |
| Прибор для печатания карт местности с выраженным рельефом по парным аэрофотоснимкам | 1926 |
|
SU10971A1 |
| Устройство для определения гранулометрического состава породы | 1973 |
|
SU481767A1 |
| Устройство для разбивочных работ в строительстве | 1984 |
|
SU1224583A1 |
1. Прибор для последовательного ориентирования аэроснимков, характеризующийся тем, что он состоит: а) из двух ориентировочных столиков (фиг. 2, 2′ и 2′′), служащих для перемещения камер В в трех взаимно перпендикулярных направлениях и для вращения их вокруг точки О, лежащей вблизи передней главной точки объектива соответствующей камеры, и б) из наблюдательной системы (фиг. 4, 4′ и 4′′), служащей для одновременного наблюдения негативных картин двух камер В и для измерения относительных размеров изображений.
2. Форма выполнения охарактеризованного в п. 1 прибора, отличающаяся тем, что ориентировочный столик состоит из кольца 10, которое установлено на раме, передвижной в трех взаимно перпендикулярных направлениях: а) в горизонтальной плоскости по общей раме с другой камерой и по рельсам 14 при помощи зубчатого соединения, управляемого маховичком У, и б) в вертикальном направлении при помощи трех вертикальных винтов 11, действующих на гайки 12 посредством зубчатых соединений 13 от маховичка Z, каковое кольцо 10 соединено зубчатым сцеплением, управляемым винтом К, с лежащими на нем кольцом 4, по прорезам 4′ дугообразных отростков которого могут ходить цапфы рамы 1, поддерживающей камеру В и охватывающей две цапфы кольца 2, две другие цапфы которого входят во втулки системы 6. соединенной с кольцом 5, поворотным на цапфах 5′ в кольце 8 при вращении зубчатки 10 бесконечным винтом 7′, при этом кольцо 8 устроено скользящим по кольцу 4, из коих колец кольцо 2 несет кроме того на карданном подвесе 14′, 15 трубу 16, заключающую в себе телеобъектив 17, 17′.
3. Форма выполнения охарактеризованного в п. 1 прибора, отличающаяся тем, что наблюдательная система прибора состоит из матовых, снабженных шкалами и марками пластинок 1, на которые проектируются изображения, даваемые телеобъективами 17, 17′ и отбрасываемые далее при помощи призм 2 и 4 и объективов 3, могущих быть передвигаемыми в фокальные плоскости окуляров 5, каковые пластинки 1 устроены поворотными относительно получаемого на них изображения помощью винтов 13.
4. В охарактеризованном в п.п. 1-3 приборе в случае применения его при приборе для автоматического печатания карт местности по патенту по заявочному свидетельству №78198, применение коробок 10, передвижных в пазах системы 8 с целью подведения под трубы 19 телеобъективов диафрагм 11 с матовыми стеклами, каковые трубы 19 связаны с наблюдательной системой при помощи карданного соединении 23, 24.
