Г&-ЧЗ-п
AnpuopHffff
UHtpOpMClLfUfl
N3
00 СП
00
ьо
NJ
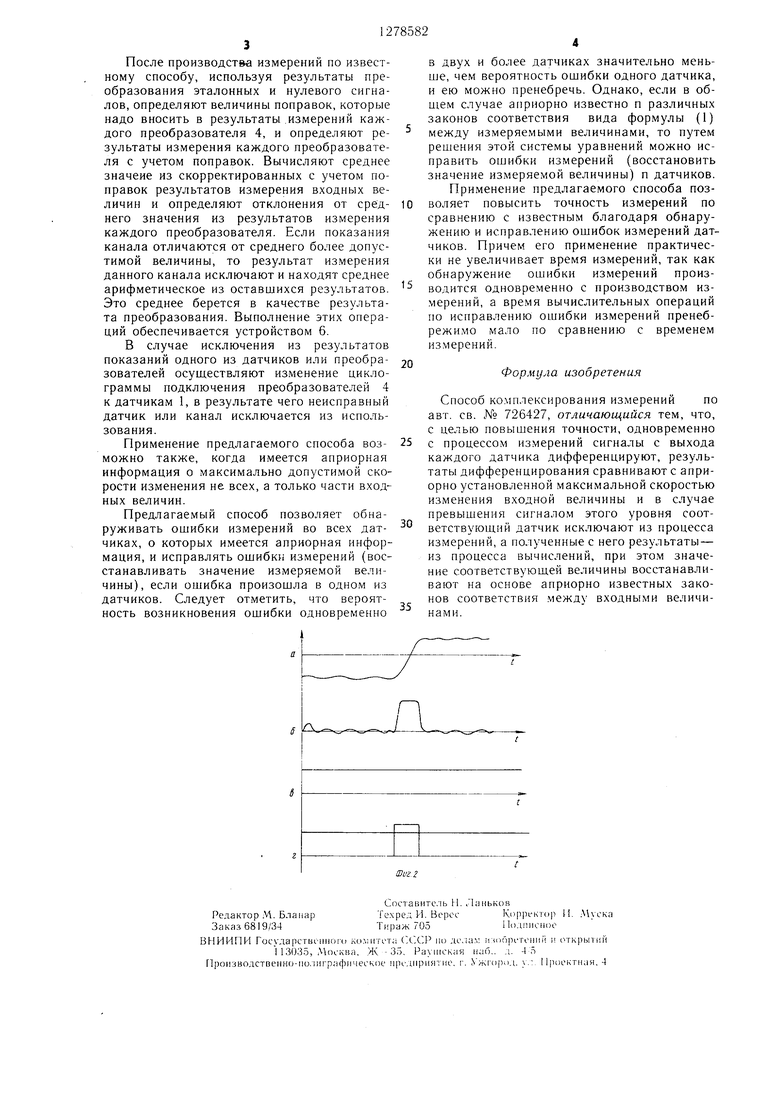
Фиг. I Изобретение относится к измерительной технике, может найти применение в информационно-измерительных системах и является усовершенствованием изобретения по авт. св. № 726427. Цель изобретения - повышение точности измерений при том же времени измерений. На фиг. 1 изображена схема для реализации предлагаемого способа; на фиг. 2 - временные диаграммы. Предлагаемый способ может быть реализован с помощью устройства, содержащего датчики 1 входных величин, источники 2 эталонных и нулевого сигналов, коммутирующее устройство 3, преобразователи 4 информации, устройство 5 накопления информации, вычислительное устройство 6, логическое устройство 7 управления коммутатором. Дополнительно к этому в предлагаемом способе введены дифференцирующее устройство 8 и схемы 9 сравнения. Для применения предлагаемого способа надо до начала измерения знать закон соответствия между входными величинами и максимально допустимые скорости ихизменения. В измерительных системах, прежде всего предназначенных для испытаний сложных объектов и научного эксперимента, .часто на основе изучения физической природы объекта или его математической модели может быть априорно до начала измерений установлен закон соответствия в виде функциональной связи между измеряемыми величинами, которую можно описать математически следующим образом: f(Xi,X2,...,Xn) О,(1) где Xi, Х2, ...,хг1 - измеряемые величины; f(- )-некоторая элементарная функция. Причем функциональная связь может носить как точный, так и приблизительный нечеткий характер. Пример 1. При измерении расхода вещества в различных трубопроводах, сходящихся в один общий, имеют Qi + Q24----+ Q, где Qi, Q2,... измеряемые расходы вещества в каждом трубопроводе, Q - измеряемый расход в общем трубопроводе. Данное соотношение может выполняться не точно, а приблизительно вследствие неконтролируемых утечек вещества. Пример 2. При угловых измерениях в многоугольнике выполняется «1 + «2 + + У- (п-2).л, где «1, а2, ..., an - измеряемые углы; п - количество углов. Аналогичные соотношения могут быть установлены, например, при измерениях полей регулярных функций различных физических параметров (давлений, температур). Вид функциональной связи может быть определен следующи.ми способами: статистической обработкой результатов предыдущих испытаний данного объекта, обработкой результатов испытаний аналогичных объектов и моделей данного объекта, а также построением математической или имитационной модели исследуемого объекта, или явления. Максимально допустимая скорость изменения входных величин определяется инерционностью объекта измерений и может быть установлена на основе изучения объекта испытаний или эксперимента, а также взаимодействия датчика с объектом измерений. Согласно известному способу подключают преобразователи 4 информации к входным датчикам 1, источникам 2 эталонных и нулевого сигналов и осуществляют измерения входных величин, эталонных и нулевого сигналов. Полученную информацию запоминают в устройстве 5 накопления информации. Преобразователи информации подключают к входным датчика.м 1, источникам 2 эталонных и нулевого сигналов в другой последовательности. Осуществляют повторные измерения входных величин, эталонных и нулевого сигналов при этом подключении датчиков, запоминая полученную информащ ю в устройстве 5 накопления. Повторяют указанные операции до тех пор, пока все преобразователи 4 не подключены к каждому входному датчику 1. Одновременно с производством измерений дополнитедльно по отношению к известному способу сигналы с выходов датчиков 1 (фиг. 2 а) дифференцируют. Сигналы с выходов дифференцирующих устройств 8 (фиг. 2 б) подают на схемы 9 сравнения, на другой вход которых подают сигналы, соответствующие величине максимальной скорости изменения входных величин (фиг. 2 в). Если за время измерений сигнал на входе схемы 9 сравнения не превышает установленного уровня, то это свидетельствет об отсутствии ошибок измерений соответствующих датчиков 1. При отсутствии ошибок в датчиках 1 осуществляют обработку результатов измерений согласно известному способу. Если сигнал на входе схемы 9 сравнения превышает априорно установленную границу (фиг. 2 г), то это свидетельствует об ошибках измерения соответствуюшего датчика 1. В этом случае результаты измерений данного датчика исключают из процесса дальнейшей обработки, а сам датчик исключают из процесса подключения к преобразователям 4. Исключение отказавшего датчика из процесса измерений и полученных с него результатов из процесса обработки для получения оценок измеряемых величин позволяет повысить точность измерений. Для исключения отказавшего датчика 1 из процесса измерений номер отказавшего датчика передается в логическое устройство 7 управления коммутатором, которое производит изменение циклограммы подключения преобразователей 4 к датчикам 1. После производства измерений но известному способу, используя результаты преобразования эталонных и нулевого сигналов, определяют величины поправок, которые надо вносить в результаты измерений каждого преобразователя 4, и определяют результаты измерения каждого преобразователя с учетом поправок. Вычисляют среднее значеие из скорректированных с учетом поправок результатов измерения входных величин и определяют отклонения от среднего значения из результатов измерения каждого преобразователя. Если показания канала отличаются от среднего более допустимой величины, то результат измерения данного канала исключают и находят среднее арифметическое из оставшихся результатов. Это среднее берется в качестве результата преобразования. Выполнение этих операций обеспечивается устройством 6. В случае исключения из результатов показаний одного из датчиков или преобразователей осуш,ествляют изменение циклограммы подключения преобразователей 4 к датчикам 1, в результате чего неисправный датчик или канал исключается из использования. Применение предлагаемого способа возможно также, когда имеется априорная информация о максимально допустимой скорости изменения не всех, а только части входных величин. Предлагаемый способ позволяет обнаруживать ошибки измерений во всех датчиках, о которых имеется априорная информация, и исправлять ошибки измерений (восстанавливать значение измеряемой величины), если ошибка произошла в одном из датчиков. Следует отметить, что вероятность возникновения ошибки одновременно в двух и более датчиках значительно меньше, че.м вероятность ошибки одного датчика, и ею можно пренебречь. Однако, если в общем случае априорно известно п различных законов соответствия вида формулы (1) между измеряемыми величинами, то путем решения этой системы уравнений можно исправить ошибки измерений (восстановить значение измеряемой величины) п датчиков. Применение предлагае.мого способа позволяет повысить точность измерений по сравнению с известным благодаря обнаружению и исправлению ошибок измерений датчиков. Причем его применение практически не увеличивает время измерений, так как обнаружение ошибки измерений производится одновременно с производством измерений, а время вычислительных операций по исправлению ошибки измерений пренебрежимо мало по сравнению с временем измерений. Формула изобретения Способ ко.мплексирования измерений по авт. св. № 726427, отличающийся тем, что, с целью повышения точности, одновременно с процессом измерений сигналы с выхода каждого датчика дифференцируют, результаты дифференцирования сравнивают с априорно установленной максимальной скоростью изменения входной величины и в случае превышения сигналом этого уровня соответствующий датчик исключают из процесса измерений, а полученные с него результаты - из процесса вычислений, при этом значение соответствуюш.ей величины восстанавливают на основе априорно известных законов соответствия между входными величинами.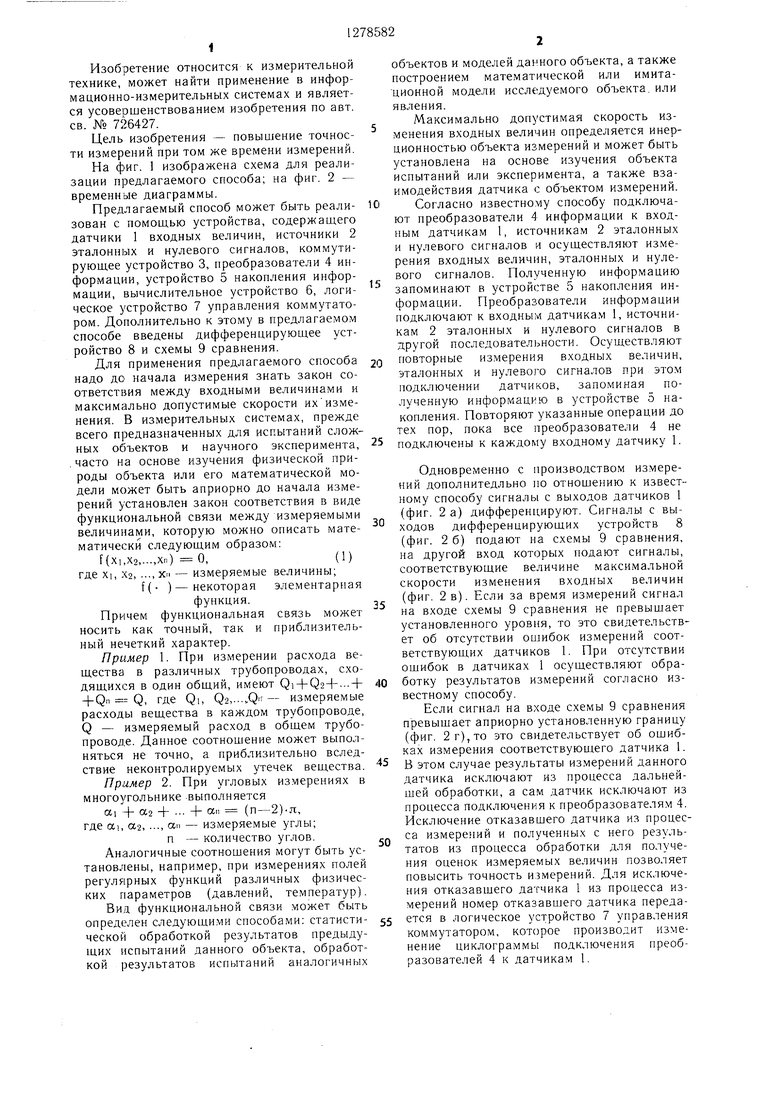
Изобретение относится к измерительной технике и может быть применено в информационно-измерительных системах. Цель изобретения - повышение точности измерений. Для этого, используя результаты преобразования эталонных и нулевого сигналов, определяют величины поправок, которые надо вносить в результаты измерений каждого преобразователя 4, и определяют результаты измерения каждого преобразователя 4 с учетом поправок. Вычисляют среднее из скорректированных с учето.м поправок результатов измерения входных величин и определяют отклонения от среднего из результатов измерения каждого преобразователя 4. Если показания канала отличаются от среднего более допустимой величины, то результат измерения данного канала исключают и находят среднее арифметическое из оставшихся результатов, которое берется в качестве результата преобразования. Выполнение этих операций обеспечивается вычислительным устройством 6. При исключении из результатов показаний одного из датчиков 1 или преобразователей 4 осуществляS ют изменения циклограммы подключения преобразователей 4 к датчикам 1, в резуль(Л тате чего датчик или канал исключают из использования. 2 ил.
| Способ комплексирования измерений | 1978 |
|
SU726427A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
