Изобретение относится к области регулирования и предназначено для контроля цодачи длинных эрлифтов, у которых отношение общей длины трубы к эквивалентному диаметру больше 200 в зоне регули- ровочной емкости зумпфа, и может быть использовано в системах гидротранспорта угля, например, на угольных гидрошахтах.
Цель изобретения - повыц ение надежности контроля.
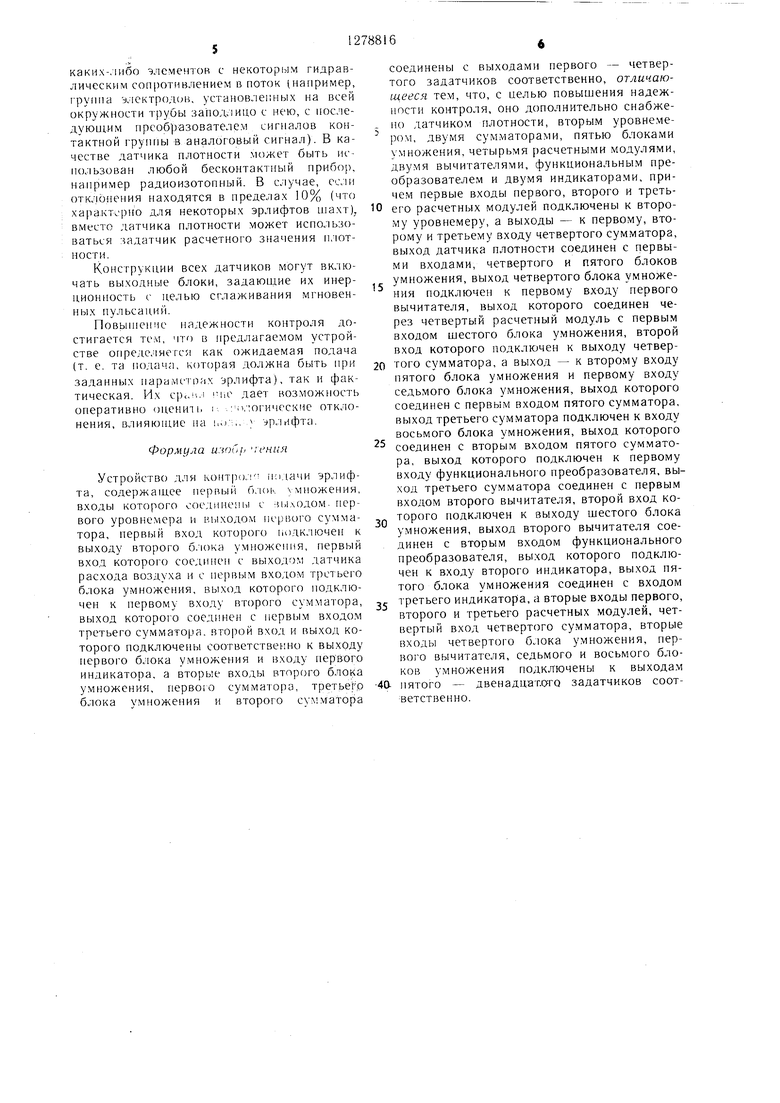
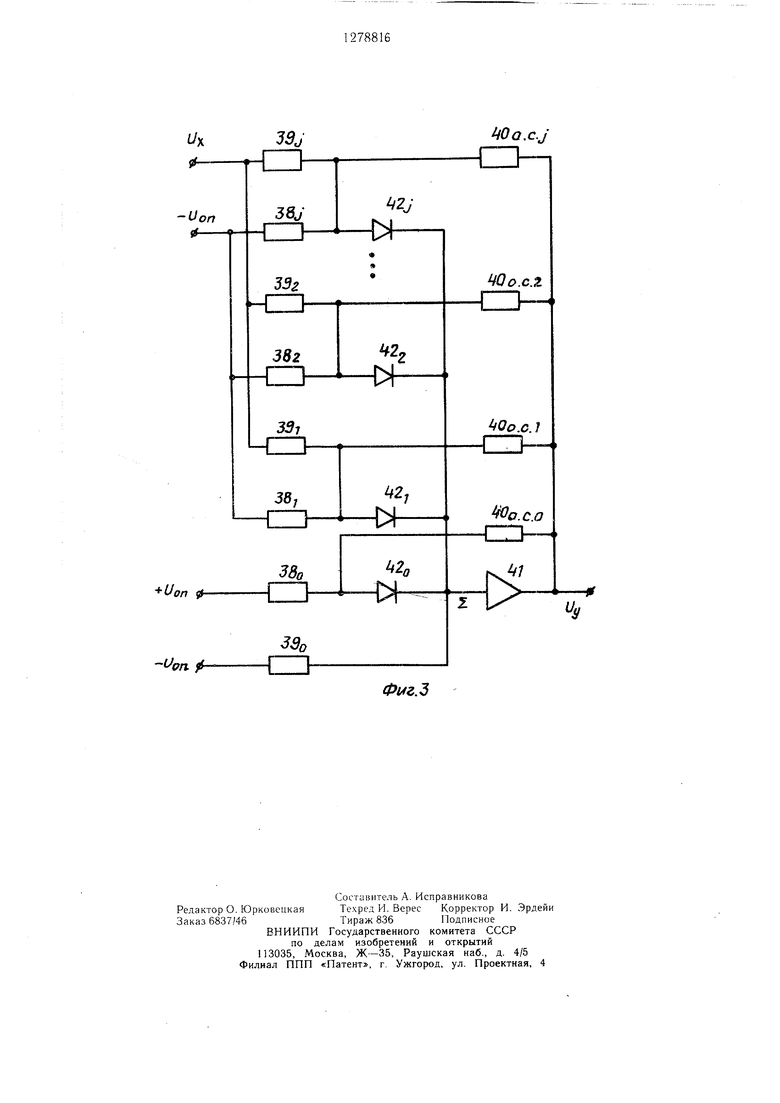
На фиг. 1 представлена функциональная схема устройства и контролируемого объекта; на фиг. 2 - схемы расчетных блоков; :iia фиг. 3 - схема расчетного модуля.
Эрлифт состоит из всаса 1, смесителя 2, трубы 3 длиной Н и воздухоотделителя 4. Турбокомпрессоры 5 нагнетают под давлением воздух по-воздуховоду 6 в смеситель. Сжатый воздух устре.мляется вверх по трубе, захватывая находящиеся в зумпфе 7 частицы 8 угля с водой. В воздухоотделителе происходит отделение воздуха, и гидросмесь далее самотеком направляется по трубе 9 на обработку.
Устройства для контроля подачи эрлифта содержит датчик 10 расхода воздуха, уровнемеры 11 и 12, датчик 13 плотности, расчетные блоки , вычитатель 17, функциональный преобразователь 18 и индикаторы 19.
Расчетный блок 14 содержит блоки 20- у.множения и сумматоры 23-25. Рас- четный блок 16 содержит расчетные модули 26 29, сумматор 30, блоки 31-33 умножении и вычитатель 34. Расчетный блок 15 содержит блоки 35 и 36 умножения и сум- ;iTOp 37.
Расчетный модуль содержит резисторы
Зв„, 38,,..., 38,, 39о,..., 39,. 40„.о, 40„
40,1 с 1, операционный усилитель 41 и диоды 42„, 42,,..., 42,.
Подача эрлифта косвенно определяется выражением
Q (KiQ..+ K2)-h,+ (K3Q«+ K4), (1)
где Ki - K4 - постоянные коэффициенты при аппроксимации выражением
зависимости
Q---V2-(gO,.gbK,k.q)-KQgЛ5 5,5 1
(2)
ускорение свободного падения, 50 эквивалентный диаметр трубы эрлифта, м;
модельная подача эрлифта, подача воздуха в смеситель эрлифта,
)
T+q,,
а
Ф
h.
а тг- относительное
HS
hпогружение;
уровень от смесителя до зеркала воды, м;
Нэ - длина подъемной трубы от смесителя 2 до воздухоотделителя 4, м;
q - удельный расход воздуха;
q,, - приведенный расход воздуха; 0,04 - сопротивление проточной части;
qn + (P +0,5р gh,): ),
где P;i - атмосферное давление. Па; р - плотность воды, кг/м .
Для эрлифта с 0,84 м, ,14 - 0,2 значения коэффициентов следуюцхие: К, 0,00675; Ki 0,00026; ,00064; К4 0,6369.
В трубе 9 может быть измерена фактическая подача эрлифта. В результате обобщения известных данных и исследований установлено, что зависимость для определения расхода потока гидросмеси в трубе 9 имеет вид
дт (ai--a2p2)° (a3+a4h4 + a5ht, + ), (3)
где Ь„ - уровень гидросмеси в трубе 9, м; а 1 + аг (i - уклон русла, рад);
0,75i(р - плотность воды,
р,. У:акс-р т/м );
фактическая подача эрлифта, коэффициент, зависящий от i и а2; коэффициент, зависящий от i и
р макс;
ПЛОТНОСТЬ гидросмеси предельно нагруженного потока, кг/м.
р., „,кс (РТ+ q ) (1+ q.p
где РТ - плотность транспортируемого твердого, кг/м ;
q - удельный расход воды, кг/м ; В|, 132 -постоянные эмпирические коэффии В.З циенты;
Яз. а, - постоянные коэффициенты квадра- HS и Не тичной аппроксимации выражения
ш-C-R ;;
о,,
ПОЛИНОМОМ вида
Кс 2 a3+/-h,f, 0
где R - радиус трубы;
ы R- -J-arcsin- «
X cos (arcsin
R
R- h.. R
R-h,, R
X
Ч,
R,,
Rn - |-идр; :-/, -л : ill I , M;
ci) -- сечение- ii-;Tf ba.
X - cMOMOiiH ,;M : i- ТП русла, м;
С-- CKopoi ПОП M in/Kiii4 4b для д; i KOIO Ri и ;i;i.i.) к()-:)ф)ициеь1 а шероховатости n желоба, опредсля- см)1Й НО форму.с Л. М. Г 1авловскогч;.
. д. 1Я |ру6ы с п 0,0135;
,3 м; К, (0,084-2,774-h,.+-59,G6X Xh ;,--60,, в д.1апазоне 0,,, 1,6R максимальная (iorpeiiiHOCTb аппроксимации , а в раоочсм диапазоне 0,,,; 1,6R«,,.0,7%.
Устройство работает следующим образом.
Сигналы с датчика 10 расхода н(Jздy.x;; и от уровпемера 11 поступают на расчетный блок 14, на другие входы которого поступают сигналы Ki и K.t от соответствующих задатчиков. Блок 14 определяет величину рГ по математической модели (1), т.е. определяется, какова должна быть подача эрлифта для измеренных h. и QB при полной технологической исправности объекта. Сиг- на,лы с уровнемера 12 и датчика 13 плотности поступают на расчетный блок 16, куда введены также сигналы Ai-ОБ от соответствующих задатчиков. Блок 15 определяет величину зависимости (3), что соответ- твует значению фактической нодачи эрлифта. Значения Q и Q поступают на блок 15, определяющий величину максимальной абсо- лютной погрещности Л величины Д 52-Qt+ 61 (4)
где 6 - максимальные относительные погрещности определения подачи эрлифта соответственно по зависимостям (1) и (3), 6, 0,08; 0,05.
Вычитателем 17 определяегея величина разности Величина Д устанавливает зону нечувствительности в функциональном преобразователе 18, на выходе которого появляется сигнал разности Д фактического и моделируемого значений расходов с учетом погрещности метода. Величина Д позволяет судить о степени nperf 1нения Q- над рГ, что дает возможно -.мимо более достоверного контроля. :и, .юсти- ровать объект.
Блок 14 работает следующим образом. Сигнал с датчика 10 расхода воздуха поступает на блоки 20 и 21 умножения, на другие входы KOTOpbix поступают заданные зна- чения коэффициентов Ki и Кз. С уровнемера 11 значение уровня гидросмеси поступает в блок 22 умножения, осуществляющий вычисление функции f (K,Qj + Kj)ui полученный сигнал направляется в сумматор 25, где складывается с функцией f, + К....
Блок 16 работает следующим образом. Сигнал Н„ с уровнемера 12 поступает па входы расчетных модулей 26-28, на
i;x; ;:.) KOTOfihix от ; i-1 цне коз.
1Н ОНреЛС. ;Ь.
сигна. ил которых i; -, щие входы сумма значение К . 13 Н.ЧОТМОСТ1 онределяющн не. :i поступяет на пычит значение ./i J:|ij. I тазуетс п pae4eTiii)iM (а, L, 2f L) . Сигма 29 11 еумматопа 30
ножмтеля 32, онре;
.. - ii iia.ib;. еоотпет- : , (); а... Рагчетн1 1е
-..ражсг ача Пг.
. ; li:.( :iOTiieTC i ii И)Ч11)а io. .,er :.ii; . lii iia. oj с датчика ч i. i на умножн1ч н. М, 4Hiiy Э;()т епг на. aic. ih :)4, определяющий 1ое.1едпий сигнал преоб- модулем 29 в величтк лы е расчетного мол. 1я поступают на входы уу, кмяющего значение Q
;
0
5 0
0
Q 5
Блок 15 работает следуюп1им образом. (л1гна. 1. Q- e сумматмрг, 25 поступает на н.ход о.м. ча 3() ум11о ке 111я. на выходе которого определяется зпа-;ение абсо,-1ютной iioi leHi- ности Д« 6rQ Аналогично б.ток 3.) умножения определяет ЛФ Сумматор 37 определяет велнчннуД по зависимости (4).
Расчетные модули МОГУТ быть pea;ui3oiui- ны, папрпмер, на схемах диодных функцио- нальпых преобразований, настройка которых на необходимую функцию осущеетвля- ется установкой сопротивлений в непя.х диодных элементов, величины которых по известным коэффициентам аппроксимапии находятся расчетным путем.
Каждый расчетпый модуль реализует функцию ,где h - - переменпая (уровень); а и Ь - постоянные коэффициенты.
Расчетный модуль осуц:.ествляет кусочно-линейную аппроксимацию выражения a-h , и в зависимости от а и 1э определяются величины сопротив.тений.
Для каждого диода 42„, 42|42j рассчитывается входное напряжение, при котором происходит его отключение в заниси.мо- сти от аппроксимируемой функции. После определения количества одновременно работающих диодов производится расчет резисторов для каждого линеаризованного участка аппроксимирующей функции.
Расчетный модуль 29 реализует функцию где X -ар-озр-, выражение (3). Выражение является частным случаем выражения a.Y, где а I, Ь 0,5.
Однако в отличие от других коэффициентов (зависящих от конкретных конструктивных параметров эрлифта) а всегда равен 1. Поэтому для модуля 29 из, 1Н1нне вводить задатчик коэффп 1иента а 1, поэтому )().:.у.1Ь 29 ОДНОГ.ХОДОВЫЙ.
Фу1:К|П1она, 1ьн1 1Й нреобразовате, 1ь 18 реа.пизует н(М1;нейноеть тина зоны нечувствительности и может бьрь реал}13ов,тн по схеме расчетного модуля (фиг. 3). В этом с.чучае выход блок, 1 о (с Л ) подсоединен к Г.,,,.
В качестве xpoBiieMc pa 12 может быть использован извесгньи бесконтактный пз- мерите.1ь , 1нбо контактный, в конструировании которого не нpeд чмoтpeнo введение
каких-либо элементов с некоторым гидравлическим сопротивлением в поток 1на фимер, I pyiiiia электрод(Л5, установленных на всей окружности трубы загюд.жцо с нею, с носле- дуюи1,им иреобразователем сигналов контактной груипы в аналоговый сигнал). В качестве датчика плотности может быть использован любой бесконтактный прибо(), например радиоизотопный. В случае, ee;in откдЬ:нения находятся в нредела.х 10% (что характерно для некоторых эрлифтов шахт), вместо датчика плотности может использоваться задатчик расчетного значения п.чот- ности.
Конструкции всех датчиков могут включать выходные блоки, задаюпяие их инерционность с целью сглаживания мгновенных пульсаций.
Повышение надежности контроля достигается тем, что в предлагаемом устройстве определяется как ожидаемая подача (т. е. та подача, которая должна быть при заданных нараметоах эрлифта), так и фактическая. Их cpc. i.i i-iio дает возможность оперативно оценить i :м, ;огические отклонения, влияющие на :,.),. у эрлифта.
Формула u:iOi /i гения
Устройство для контро. п;1дачи эрлифта, содержащее первый б.кн. множения, входы которого соединен с и,1ходом. первого уровнемера и выходом первого сумматора, первый вход которого подключен к выходу второго б. юка умножения, первый вход которого соединен с выходом датчика расхода воздуха и с первым входом третьего блока умножения, выход которого подключен к первому входу второго сумматора, выход которого соединен с первым входом третьего сумматора, второй вход и выход которого подключены соответственно к выходу нервого блока умножения и входу нервого индикатора, а вторые входы второго умножения, первого сумматора, третьего блока умножения и второго су ;матора
соединены с выходами первого - четвертого задатчиков соответственно, отличающееся тем, что, с пелью повышения надежности контроля, оно дополнительно снабже- но датчиком плотности, вторым уровнеме- ром, двумя сумматорами, пятью блоками умножения, четырьмя расчетными модулями, двумя вычитателями, функциональным преобразователем и двумя индикаторами, причем первые входы первого, второго и третьего расчетных модулей подключены к второму уровнемеру, а выходы - к первому, второму и третьему входу четвертого сумматора, выход датчика плотности соединен с первыми входами, четвертого и пятого блоков умножения, выход четвертого блока умножения подключен к первому входу первого вычитателя, выход которого соединен через четвертый расчетный модуль с первым входом шестого блока умножения, второй вход которого подключен к выходу четвертого сумматора, а выход - к второму входу пятого блока умножения и первому входу седьмого блока умножения, выход которого соединен с первым входом пятого сумматора, выход третьего сумматора подключен к входу восьмого блока умножения, выход которого соединен с вторым входом пятого сумматора, выход которого подключен к первому входу функционального преобразователя, выход третьего сумматора соединен с первым входом второго вычитателя, второй вход которого подключен к выходу шестого блока умножения, выход второго вычитателя соединен с вторым входом функционального преобразователя, выход которого подключен к входу второго индикатора, выход пятого блока умножения соединен с входом
третьего индикатора, а вторые входы первого, второго и третьего расчетных модулей, четвертый вход четвертого су.мматора, вторые входы четвертого блока умножения, первого вычитателя, седьмого и восьмого блоков умножения подключены к выходам
пятого - двенадцат. задатчиков соответственно.
Регулировочная емкость
к 16
На га
Kj К} Кц
S 62
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля подачи эрлифта | 1982 |
|
SU1094023A1 |
| Устройство для контроля расхода гидросмеси в призматическом русле | 1985 |
|
SU1296843A1 |
| Способ управления эрлифтной установкой | 1984 |
|
SU1245766A1 |
| Устройство для регулирования давления | 1988 |
|
SU1674075A1 |
| Устройство для управления гидроподъемной системой | 1989 |
|
SU1655886A1 |
| Устройство для контроля работы электрических машин | 1986 |
|
SU1381560A1 |
| Устройство для регулирования уровняжидКОСТи B ЕМКОСТи | 1979 |
|
SU830332A2 |
| Цифровой анализатор спектра | 1985 |
|
SU1256044A1 |
| Способ управления эрлифтом | 1986 |
|
SU1460434A1 |
| Устройство для управления приводом манипулятора | 1987 |
|
SU1496999A1 |
Изобретение относится к области регулирования и предназначено для контроля подачи длинных эрлифтов, у которых отношение общей длины трубы к эквивалентному диаметру больше 200 в зоне регулировочной емкости зумпфа, и может быть использовано в системах гидротранспорта угля, например, на угольных гидрошахтах. Цель изобретения - повышение надежности контроля. В устройство для контроля подачи эрлифта дополнительно введены датчик плотности, второй уровнемер, два сумматора, пять блоков умножения, четыре расчетных модуля, два вычитателя, функциональный преобразователь и два индикатора. Повышение надежности контроля достигается тем, что в заявляемом устройстве определяется как ожидаемая подача (т.е. та подача, которая должна быть при заданных параметрах эрлифта), так и фактическая. Их сравнение дает возможность оперативно оценить технические отклонения, влияю- шие на подачу эрлифта. 3 ил. (Л ГС 00 00 О5
lilS.n
ЗЭо
СИ
фуг.Ъ
| Куприн А | |||
| И | |||
| Безнапорный гидротранспорт.-М.: Недра, 1969, с | |||
| Счетная линейка для вычисления объемов земляных работ | 1919 |
|
SU160A1 |
| Верлань А | |||
| Ф | |||
| и др | |||
| Электронные функциональные преобразователи систем автоматики.-Киев, 1981, с | |||
| Механический грохот | 1922 |
|
SU41A1 |
| Щербаков В | |||
| И | |||
| и др | |||
| Электронные схемы на функциональных операционных усилителях.-Киев: | |||
| Техника, 1983, с | |||
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
| Устройство для контроля заиленияТРубОпРОВОдА | 1979 |
|
SU830324A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для контроля подачи эрлифта | 1982 |
|
SU1094023A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
