1
Изобретение относится к насосо- строению, в частности к эрлифтным гидроподъемам.
Цель изобретения - увеличение КПД путем выбора оптимальных значений скорости смеси с учетом концентрации твердой фракции.
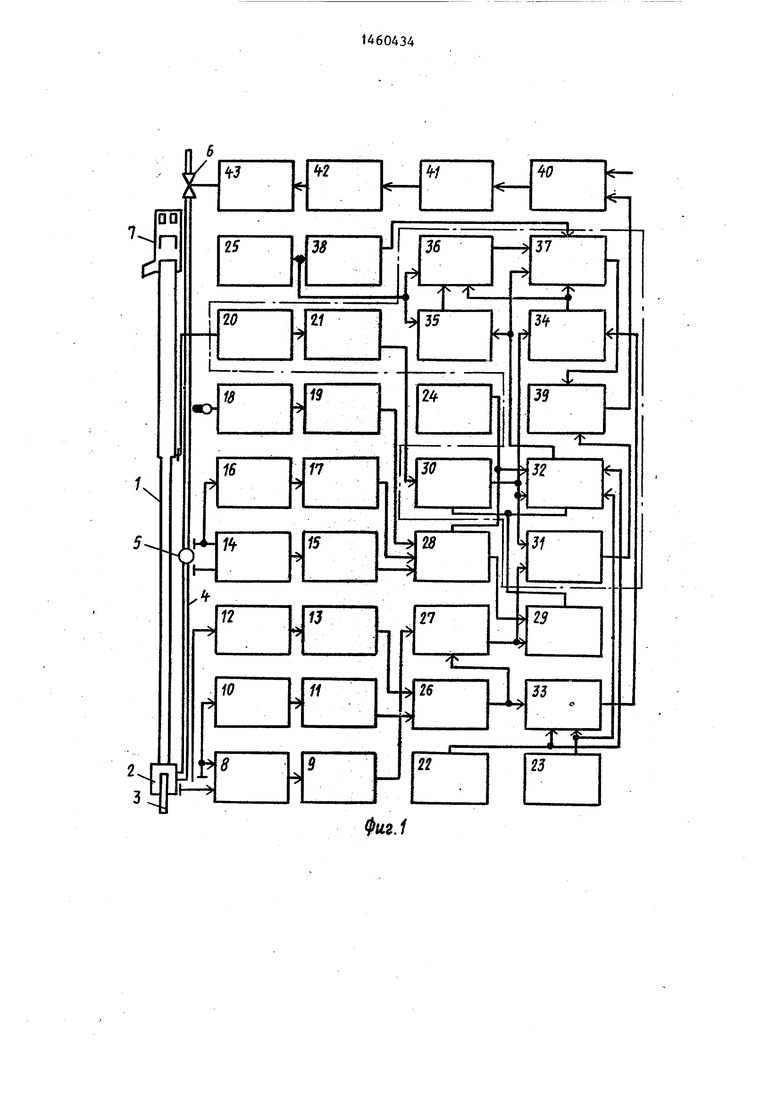
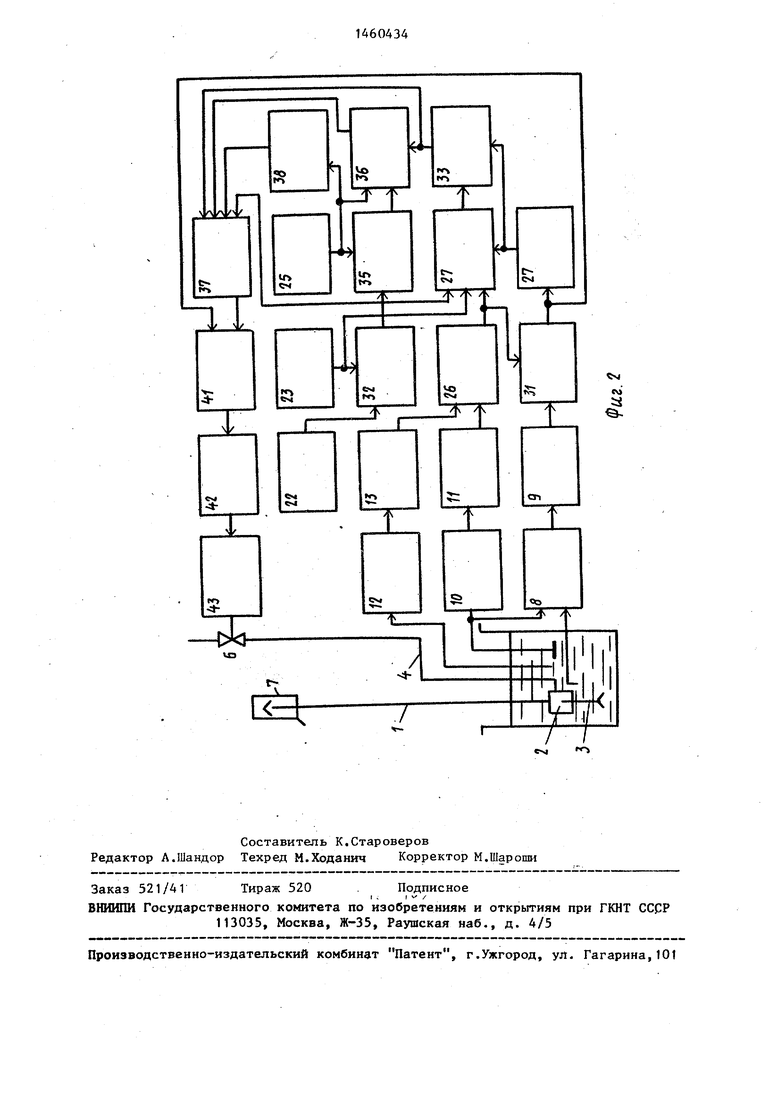
На фиг. 1 приведен вариант устройства для реализации способа при контроле течения в .подъемной трубе эрлифта; на фиг. 2 - то же, при контроле течения в подающей трубе.
Устройство содержит подъемную трубу 1 эрлифта, в нижней части которой расположен смеситель 2 с подающей трубой 3 и трактом 4 подачи рабочего тела, сужающее устройство 5 и регулируемый клапан 6, воздухоотделитель 7, датчик 8 разности давлений на- гружения в смесителе 2, регистратор 9 разности этих давлений, датчик 10 ,
давления на уровне погружения смесителя 2 с регистратором 11, датчик 12 уровня погружения смесителя 2 с регистратором 13, датчик 14 перепада давлений на сужающем; устройстве 5 с регистратором 15, датчик 16 давления перед сужающим устройством 5 с регистратором 17, датчик 18 температуры рабочего тела перед сужающим устройством 5 с регистратором 19, датчик 20 давления в контрольных сечениях подъемной трубы 1 с .регистраторами 21, задатчик 22 плотности транспортируемой твердой фракции, задатчик 23 плотности несущей фазы, задатчик 24 плотности рабочего тела в нормальном состоянии и задатчик 25 средневзвешенного диаметра частиц транспортируемой твердой фракции, преобразователи 26 плотности смеси, преобразователи 27 подачи.
а
&о
4
1
преобразователи 28 расхода рабочего тела, преобразователи 29 удельного расхода рабочего тела, преобразователи 30 удельного расхода в подъемной трубе 1, преобразователи 31 ско- рости смеси, преобразователи 32 дифференциальной плотности смеси, преобразователи 33 и 34 объемной конценрации твердой фракции гидросмеси и пневмогидросмеси, преобразователи 35 скорости свободного падения части в смеси,преобразователи 36 скорости стесненного падения частиц в смеси, преобразователи 37 критической скорости, преобразователи 38 опытной константы критической скорости, элементы 39 сравнения, тор 40 скорости смеси, регулятор 41 скорости смеси, блок 42 управления и исполнительный механизм 43.
На фиг, 1 показаны блоки 20, 2t, 30, 31, 32, 34-39, относящиеся только к одному контрольному сечению.
Способ управления эрлифтом осуществляется устройством следующим образом (фиг, 1).
Транспортируемая гидросмесь поступает в нижнюю часть эрлифта: подающую трубу 3, смеситель 2 и нижнюю часть подъемной трубы 1 и создает уровень h погружения смесителя 2 и, соответственно, давление Р„ на уровне погружения смесителя 2.
25 плотности Рц(,м в преобразователе 28 определяют мгновенное значение объемного расхода рабочего тела эрлифта (по тракту 4), приведенное к нормальным условиям (к давлению Рщ,щ и температуре QHOM по которому с учетом сигнала от преобразователя 27 соответствующего подаче Q, в преобразователе 29 определяют мгновенное значение удельного расхода рабочего
По тракту 4 через сужающее устрой- 35 тела эрлифтом q, по которому с уче- ство 5 и регулируемый клапан 6 в сме- том сигналов от регистраторов 21, со- ситель 2 подают рабочее тело (с температурой t) ,которое проходя через сужающее устройство 5, создает на нем перепад давления йР..„ и абсоответствующих давлениям Р, в соответствующих преобразователях 30 определяют мгновенные значения удельных
40 расходов рабочего тела в контролируемых сечениях подъемной Т1РУбы 1 Q.
лютное давление Р,, перед ним. В смесителе 2 образуется пневмогрдро- смесь, которая за счет энергии рабочего тела транспортируется эрлифтом по подъемной трубе 1 в воздухоотделитель 7. Гидросмесь, двигаясь по по-, дающей трубе 3, создает разность &Рд между давлениями „ и в смесителе 2. Пневмогидросмесь, транспортируемая по .подъемной трубе 1, имеет соответствующее давление Р,, в каждом соответствующем Z-M сечении подъемной трубы 1.
Измеряют.датчиками 8,10, 12, 14,
40 расходов рабочего тела в контролир мых сечениях подъемной Т1РУбы 1 Q.
С учетом сигнала от преобразова ля 27, соответствующего подаче Q-, в преобразователях 31 определяют
45 мгновенные значения скоростей смес в контрольных сечениях подъемной т бы 1 V. .
По сигналам задатчиков 22-24 и преобразователей 2-9 и 30, соответс
50 вующих значениям плотностей р, Рц РНОМ удельных расходов q, q в п образователях 32 определяют мгнове ные значения дифференциальных отно тельных плотностей твердой фракции
Р,
16, 18 и 20 значения параметров ЛРп 55 пневмогидросмеси в Z-x контрольных
р, h, йРсу , РСУ , t, Р. Сигналы с выходов датчиков 8, 10, 12, 14, 16, 18, 20 поступают соответственно на. регистраторы 9, 11, 13, 15, 17, 19,
сечениях а
2 .
По сигналам от преобразователя
и задатчиков 22 и 23, соответствую щих значениям плотностей рр, Рт ,
21, где преобразуются в пропорциональные унифициропанные сигналы. За- датчиками 22-25 задают соответственно значения плотностей: 0 - транспортируемой твердой фракции пневмогидросмеси, р - несущей фазы ппев- могидросмеси, рабочего тела в нормальном состоянии (при давлении РНОМ и температуре Т„ом) и средневзвешенного диаметра d частиц твердой фракции.
По сигналам от регистраторов 11 и t3, соответствующим значениям давления Рр и уровня h, в преобразователе 26 определяют истинное мгновенное значение плотности транспортируемой гидросмеси РС. В преобразователе 27 определяют истинное мгновенное значение подачи эрлифта Q.
По сигналам регистраторов 15, 17 и 19 и задатчика 24, соответствующим .значениям перепада давления PCV (Давления Р,. , температуры t и
плотности Рц(,м в преобразователе 28 определяют мгновенное значение объемного расхода рабочего тела эрлифта (по тракту 4), приведенное к нормальным условиям (к давлению Рщ,щ и температуре QHOM по которому с учетом сигнала от преобразователя 27 соответствующего подаче Q, в преобразователе 29 определяют мгновенное значение удельного расхода рабочего
тела эрлифтом q, по которому с уче- том сигналов от регистраторов 21, со-
тела эрлифтом q, по которому с уче- том сигналов от регистраторов 21, со-
ответствующих давлениям Р, в соответствующих преобразователях 30 опрееляют мгновенные значения удельных
расходов рабочего тела в контролируемых сечениях подъемной Т1РУбы 1 Q.
С учетом сигнала от преобразовате-. я 27, соответствующего подаче Q-, в преобразователях 31 определяют
мгновенные значения скоростей смеси в контрольных сечениях подъемной трубы 1 V. .
По сигналам задатчиков 22-24 и преобразователей 2-9 и 30, соответствующих значениям плотностей р, Рц , РНОМ удельных расходов q, q в преобразователях 32 определяют мгновенные значения дифференциальных относительных плотностей твердой фракции в
невмогидросмеси в Z-x контрольных
сечениях а
2 .
По сигналам от преобразователя 26
и задатчиков 22 и 23, соответствующих значениям плотностей рр, Рт ,
51
Оц и, преобразователе 33 определяют
мгновенные значения объемной концентрации транспортируемой твердой фракции в гидросмеси S, по которым с учетом сигналов от преобразователей 30, соответствующих значениям удельных расходов q.,, в преобразователях 34 определяют мгновенные значения объемных концентраций твердой фракции в пневмогидросмеси в контрольных сечениях Sj..
По сигналам от преобразователей 32 и задатчика 25, соответствующим значениям дифференциальных относительных плотностей а и диаметра d,, в преобразователях 35 определяют мгновенные значения скоростей свободного падения частиц твердой фракции в пневмогидросмеси в контрольных сечениях которым с учетом сигналов от преобразователей 34 и за датчика 25, соответствующих значе-
Гидросмесь, двигаясь по подающей
ниям объемных концентраций S и диаметра dj, в преобразователях 36 оп- 25 трубе 3, создает разность давлений ределяют мгновенные значения Скорое- йР между давлением погружения Р™ и тей стесненного падения частиц транспортируемой твердой фракции в пневмогидросмеси в контрольных сечениях
давлением в смесителе PCW эрлифта.
Измеряют датчиками 8, МО и 12 зн чения параметров йР, Р и h. Сигна
и
Z
По сигналу от задатчика 25, соответствующему значению диаметра d, в преобразователе 38 определяют значение опытной константы критической скорости К.
С учетом сигналов от преобразователей 32, 34, 36, соответствующих значениям дифференциальных относительных плотностей а, объемных концент30 лы с выходов датчиков 8, 10 и 12 поступают соответственно на регистраторы 9, 11 и 13. Задатчиками 22, 23 и 25 задают значения плотности твердой фракции р , плотности несущей
.jg фазы гидросмеси Пц и средневзвешенный диаметр частиц твердой фракции
По сигналам от регистраторов 11 и
13, соответствующим значениям давлераций $2 и скоростей стесненного па- 40 ний Р„ и уровня h, в преобразователе дения и, в преобразователях 37 оп- 26 определяют мгновенное значение ределяют мгновенные значения критических скоростей транспортирования частиц твердой фракции в пневмогидросмеси в контролируемых сечениях - - .45 ний &Р, в преобразователе 31 опреде- крт. которые являются требуемыми ми- ляют мгновенное значение скорости нимально допустимыми значениями ско- гидросмеси в подающей трубе 3, по ко- рости движения пневмогидросмеси в Z-м торому в преобразователе 27 определя- сечении подъемной трубы 1, обеспечи- ют мгновенное значение подачи эрлиф- вающими наиболее эффективные и эконо-gg та Qg.
плотности гидросмеси ,
С учетом сигнала of регистратора 9, соответствующего разности давлемичные режимы транспортирования частиц твердой фракции.
По сигналам от преобразователей 37 и 31, соонетствующим требуемым истинным Vj. значениям скоростей пневмогидросмеси, в элементах 39 сравнения определяют только положительную разность между ними Л.У.
В оптимизаторе 40 определяют максимальное рассогласование между требуемым и истинным значениями скоростей во всех КОНТРОЛЬНЫХ сечениях
ДУ
макс макс(.).
по которому регулятором 41 через блок 42 управления исполнительным механизмом 43 регулируемого клапана 6 изменяют расход рабочего тела и таким образом регулируют скорость Движения пневмогидросме- си по подъемной трубе 1 до тех
пор, пока мгновенные значения скоростей Vj не станут меньше требуемых минимально ДОПУСТШ-1ЫХ значений скоростей Ицр. в любом из контрольных сечений V 2; V, (при этом разность
этих сигналов равна ди 0).
Способ управления эрлифтом на примере устройства по фиг. 2 осуществляется следующим образом.
Гидросмесь, двигаясь по подающей
трубе 3, создает разность давлений йР между давлением погружения Р™ и
25 трубе 3, создает разность давлений йР между давлением погружения Р™ и
давлением в смесителе PCW эрлифта.
Измеряют датчиками 8, МО и 12 значения параметров йР, Р и h. Сигна30 лы с выходов датчиков 8, 10 и 12 поступают соответственно на регистраторы 9, 11 и 13. Задатчиками 22, 23 и 25 задают значения плотности твердой фракции р , плотности несущей
.jg фазы гидросмеси Пц и средневзвешенный диаметр частиц твердой фракции
По сигналам от регистраторов 11 и
ний Р„ и уровня h, в преобразователе 26 определяют мгновенное значение ний &Р, в преобразователе 31 опреде- ляют мгновенное значение скорости гидросмеси в подающей трубе 3, по ко торому в преобразователе 27 определя ют мгновенное значение подачи эрлиф- та Qg.
плотности гидросмеси ,
С учетом сигнала of регистратора 9, соответствующего разности давле.По сигналам от задатчиков 22 и 23, соответствующим значениям плотностей твердой фракции р и несущей фазы РЦ, в преобразователе 32 определяют gg значение дифференциальной относительной плотности транспортируемой твердой фракции, по которому с учетом сигналов от задатчика 23 и преобразователей 26 и 27, соответствующих значениям плотности HecyUieft фазы р , плотности гидросмеси pj- и подачи Q в функциональном преобразователе 27 определяют мгновенное значение пода- чи эрлифта по твердой фракции Q.
С учетом сигнала от преобразователя 27, соответствующего значению подачи Q,, в преобразователе 33 определяют мгновенное значение объемной концентрации твердой фракции в несущей фазе гидросмеси S.
По сигналам от преобразователя 32 и задатчика 25, соответствующим значениям дифференциальной относитель- ной плотности а и средневзвешенного диаметра частиц твердой фракции d , в преобразователе 35 определяют значение скорости свободного падения частиц твердой фракгщи в нерущей фазе гидросмеси U. С учетом сигналов от преобразователя 33 и задатчи- ка 25, соответствующих мгновенному значению концентрации S и значению средневзвешенного диаметра частиц d|, в .преобразователе 36 определяют мгновенное значение скорости стесненного падения частиц твердой фракции в нрсущей фазе гидросмеси в подающей трубе 3 V.
По сигналу оТ задатчика 16, соответствующему значению средневзвешенного диаметра частиц d, в прео.б- . разователе 38 определяют значение опытной константы критич-еской скорое ти К..
По сигналам от функциональных преобразователей 38, 32, 33 и 36,соответствующим значениям опытной константы критической скорости К, значе- ниям дифференциальной относительной плотности а, значениям концентрации твердой фракдаи S и значениям скорости стесненного падения частиц твердой фракции , в преобразователе 37 определяют значение критической скорости транспортирования частиц твердой фракции по подающей трубе 3 - Ui,., , которое является требуемым мгновенным минимально допустимьм значени ем скорости движения гидросйеси в подающей трубе, обеспечивающей наиболее эффективное и экономичное тран спортирование частиц твердой фракции
по ней.
По сигналам от преобразователей 3 и 31, соответствующим требуемому И истинному V значениям скоростей
гидросмеси в подающей трубе 3 эрлифта, которые поступают на регулятор 41 и далее через блок 42 управления на исполнительный механизм 43 регулируемого клапана 6, регулируют скорость гидросмеси в подающей трубе 3, изменяя расход рабочего тела. Если значение скорости гидросмеси в подающей трубе 3 меньше (больше) требуемого, минимально допустимого критического, значения V (V Utrp Р гулятор 41 отрабатывает разность сигналов и с помощью блока 42 управления и исполнительного механизма 43 открывает (закрывает)- регулируемый клапан 6, увеличивая (уменьшая) расход рабочего тела по тракту 4 подачи Тем самым он увеличивает (уменьшает) скорость гидросмеси в подающей трубе 3 до тех пор, пока ее значение не будет равняться требуемому минимально допустимому V UKO.
Это позволяет стабилизировать мгновенные значения скорости гидросмеси в подающей трубе на уровне минимально допустимых критических значений, обеспечиваюш 1х наиболее эффективное и экономичное транспортирование частиц твердой фракции по подающей трубе, предотвратить закупорки подающей трубы, повысить надежность и экономичность работы эрлифта..
Формула изобретения
Способ управления эрлифтом, заключающийся в измерении давлений в смесителе и в шахте на уровне погружения смесителя, уровня погружения определении плотности и расхода смеси, определении скорости движения смеси в подающей трубе и изменении подачи эрлифта путем регулирования расхода рабочего тепа, отличающийся тем, что, с целью увеличения КПД путем выбора оптимальн ых значений скорости смеси с учетом концентрации твердой фракции, измеряют давление смеси в контрольных сечениях, определяют удельный расход рабочего тела и скорость смеси, опреде- ляют объемную концентрацию твердой фракции и соответствующую критическую скорость смеси, сравнивают фактическое значение скорости смеси со значением критической скорости и по ;результату сравнения изменяют расход рабочего тела.
Фи.1

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления эрлифтной установкой | 1984 |
|
SU1245766A1 |
| Способ управления эрлифтом | 1986 |
|
SU1495526A1 |
| Устройство для контроля подачи эрлифта | 1985 |
|
SU1278816A1 |
| Эрлифт для очистки резервуаров | 1988 |
|
SU1504374A1 |
| УСТРОЙСТВО ДЛЯ ГАЗЛИФТНОГО ТРАНСПОРТИРОВАНИЯ | 2016 |
|
RU2623855C1 |
| СПОСОБ РАБОТЫ МОРСКОГО ЭРЛИФТА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2321748C2 |
| СПОСОБ ЭЛЕКТРИФИКАЦИИ ТЕХНОЛОГИИ ПОДВОДНОЙ РАЗРАБОТКИ МЕСТОРОЖДЕНИЙ ПОЛЕЗНЫХ ИСКОПАЕМЫХ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2321747C2 |
| Устройство для контроля подачи эрлифта | 1982 |
|
SU1094023A1 |
| Устройство для контроля заиленияТРубОпРОВОдА | 1979 |
|
SU830324A1 |
| Учебный эрлифт | 1984 |
|
SU1288744A1 |
Изобретение позволяет увеличить КПД эрлифта путем выбора оптимальных значений скорости смеси с учетом концентрации твердой фрак1ши. Измеряют давление в смесителе и в шахте на уровне погружения смесителя и уровень погружения. Определяют плотность и расход смеси, а также скорость смеси в подающей трубе. Изменяют подачу эрлифта путем регулирования расхода рабочего тела. Измеряют давление смеси в контрольных сечениях. Определяют удельный расход рабочего тела и скорость смеси, объемную концентрацию твердой фракции и соответствующую критическую скорость смеси. Сравни- .вают фактическое значение скорости смеси со значением критической скорости и по результату сравнения изменяют расход рабочего тела. 2 ил.
| Устройство для управления турбокомпрессорной станцией эрлифта | 1980 |
|
SU909347A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Способ управления эрлифтной установкой | 1984 |
|
SU1245766A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
