(54) ДАТЧИК СТАТИЧЕСКОЙ И ДИНАМИЧЕСКОЙ СОСТАВЛЯЮЩИХ ТСЖА ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
1
Изобретение относится к электроизмерительной технике и предназначено для использования автоматического регулирования электроприводов и системах автоматического управления технологическими 1фопессами, в которых в качестве исполнительных органов используются электрод&игателн постоянного тока.
Известен датчик динамической составляющей тока электродвигателя постоянно- ,д го тока, содержащий два сумматора, прямой вход первого из которых соединен с выходом датчика напряжения, связанного по входу с источником, питания якоря, а выход - с прямым входом второго сумма-15 тора, два интегратора, вход первого из которых подключен к выходу второго сумматора, а выходы - к инверсному входу последнего и входу второго интегратора, связанного по выходу с инверс- 2о ным входом первого сумматора l .
Недостаток этого устройства заключается в низкой точности. Это объясняет ся тем, что параметры реального электродвигателя подвержены температурным изменениям вследствие изменений сопротивления якоря, в то время как параметры датчика, предетавл5пошего собой модель электродвигателя на определенных усилителях, -при колебаниях температуры .остаются неизменными.
Кроме того, устройство характеризуется ограниченной областью практического использования, определяемой ниЙкими скоростями электродвигателя, посколь. ку в конструкции датчика не предусмотрена коррекция посто5шной времени второго интегратора при ослаблении магнитного потока электродвигателя.
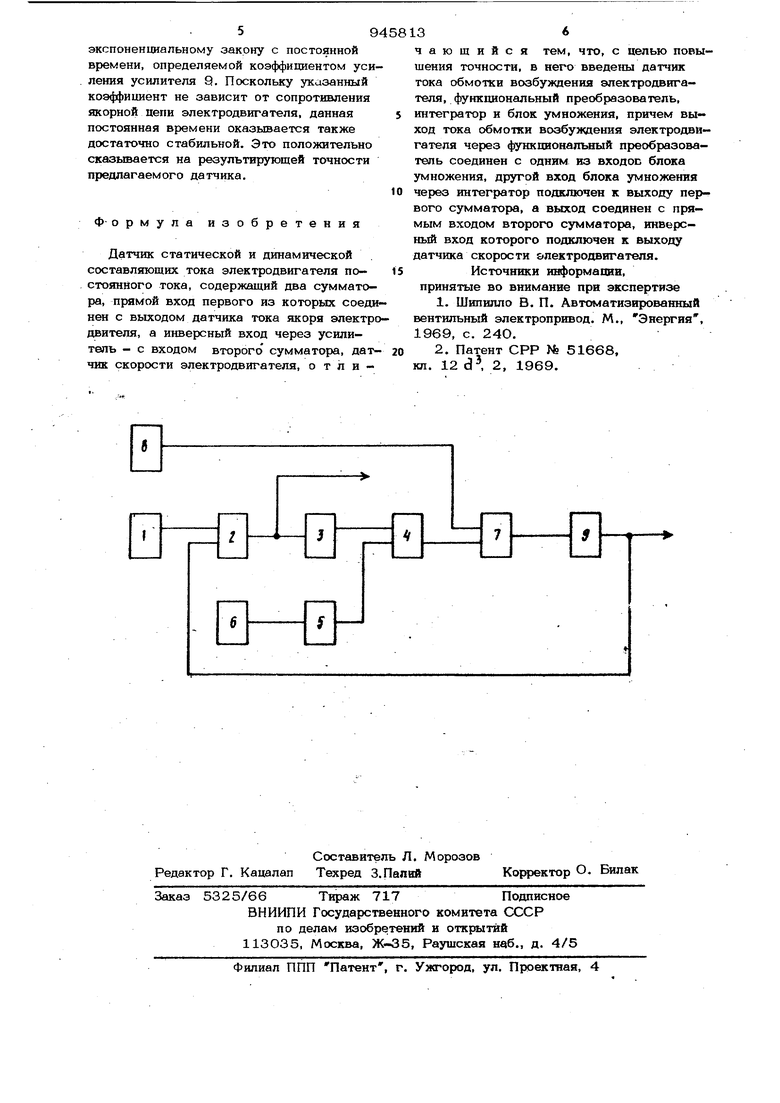
Наиболее близким техническим решением к изобретению является датчик статической составляющей тока электродвигателя постоянного тока, выполненный на основе сумматора, прямой вход которого через блок дифференцирования соединен с выходом датчика скорости электродвигателя, а инверсный вход через ус и- 3.0 лйтель подключен к выходу датчика элект ромагнитного момента электродвигателя. При необходимости одновременного измерения динамической составляющей тока электродвигателя в устройство добавляют еще один сумматор, прямой вход которого соединяют с выходом датчика тока якоря, а инверсный вход - с выходом упоминавшегося сумма.тора 2j . Недостаток известного устройства, работа которого базируется на основном уравнении динамики электропривода, также связан с невысокой точностью, обусл ленной необходимостью дифференцирования сигнала датчика скорости электродвигате ля, уровень пульсаций которого может оказаться соизмеримым с полезным сигн лом . Цель изобретения - повышение точности подобного измерительного устройст Поставленная цель достигается тем, что в датчик статической и динамической составляющих тока электродвигателя постоянного тока, содержащий два суммато ра, прямой вход первого из которых со- единен с выходом датчика тока якоря электродвигателя, а инверсный вход чере усилитель - с выходом второго сумматора, датчик скорости электродвигателя, введены датчик тока обмотки возбуждени электродвигателя, функциональный преобразователь, интегратор и блок умножения причем выход датчика тока обмотки воз буждения электродвигателя через функциональный преобразователь соединен с одним из входов блока умножения, другой вход блока умножения через интегратор подключен к выходу первого сумматора, а выход соединен с прямым входом второго сумматора, инверсный вход которого подключен к выходу датчика скорости электродвигателя. На чертеже представлена функциональ ная схема предлагаемого датчика. Устройство содержит датчик 1 тока якоря электродвигателя, сумматор 2, интегратор 3, блок 4. умножения, функциональный преобразователь 5, датчик 6 тока обмотки возбуждения электродвигателя, сумматор 7, датчик 8 скорости электродвигателя и усилитель 9. Работа устройства происходит следующим образом. С выхода датчика 1 тока якоря элект родвигателя на прямой вход сумматора 2 поступает сигнал, пропорциональный току Jji якоря электродвигателя, к инверсному входу этого же сумматора подводит ся сигнал обратной связи с выхода уси34лителя 9. Алгебраическая сумма подвижных сигналов направляе1х:я на вход интегратора 3, являющегося совместно с блоком 4 умножения моделью звена электропривода с передаточной функцией. , W(P) р- длСеФ Р vs где R - активное сопротивление якорной цепи; Т - электромеханическая постоянная времени электропривода; С - коэффициент ЭДС электродвигателя ; ф - магнитный поток одного полюса; С - коэффициент момента электродвигателя ; О - момент инерции электропривода; приведенный к валу электродвигателя ; Т - электромеханическая постоянная времени модели звена электропривода.. При этом интегратор 3 реализует передаточную функцию Wjj (р): . д д , а в блоке 4 умножения производится умножение ее на величину магнитного потока Ф. .. Сигнал, пропорциональный величине магнитного потока Ф, формируется на выходе функционального преобразователя 5, на вход которого с выхода датчика 6 подается сигнал, пропорциональный току в обмотке возбуждения электродвигателя, т. е. функциональный преобразователь 5 реализует нелинейную функцию Ф (-1 g ), где -1 - ток обмотки возбуждения двигателя. С выхода блока 4 умножения на прямой вход сумматора 7 подается сигнал (, имеющий размерность угловой скорости, который алгебраически складывается (сравнивается) с сигналом ил , поступающим с выхода датчика 8 скорости электродвигателя на инверсный вход этого же сумматора. Разность сигналов с выхода сумматора 7 поступает через усилитель 9 на инверсный вход сумматора 2. На выходе усилителя 9 формируется, таким образом, сигнал. Пропорциональный величине статической составляющей тока DCY 3 на выходе сумматора 2 - сигнал, пропорциональный величине динамической составляющей тока Зд электродвигателя. При ступенчатом приложении статической нагрузки выходной сигнал устройств ва, отображающий О ст. изменяется по
594
экспоненциальному закону с постоянной времени, определяемой коэффициентом усиления усилителя 9. Поскольку указанный коэффициент не зависит от сопротивления якорной цепи электродвигателя, данная
постоянная времени оказьюается также достаточно стабильной. Это положительно сказьюается на результирующей точности предлагаемого датчика,
Формула изобретения
Датчик статической и динамической составляющих тока электродвигателя по- стоянного тока, содержащий два сумматора, прямой вход первого из которых соединен с выходом датчика тока якоря электродвителя, а инверсный вход через усилитель - с входом второго сумматора, датчик скорости электродвигателя, о т л и 136
чающийся тем, что, с целью повышения точности, в него введены датчик тока обмотки возбуждения электродвигателя, функциональный преобразователь, интегратор и блок умножения, причем выход тока обмотки возбуждения электродвигателя через функциональный преобразователь соединен с одним из входос блока умножения, другой вход блока умножения через интегратор подключен к выходу первого сумматора, а выход соединен с прямым входом второго сумматора, инверсный вход которого подключен к выходу датчика скорости алектродвигателя.
Источники информации, принятые во внимание при экспертизе
1.Шипшшо В. П. Автоматизированный вентильный электропривод. М., Энергия, 1969, с. 240.
2.Патент СРР № 51668, кл. 12 d 2, 1969.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| Устройство для управления электродвигателем постоянного тока | 1982 |
|
SU1080241A1 |
| Электропривод постоянного тока | 1984 |
|
SU1264287A1 |
| Частотно-регулируемый электропривод переменного тока | 1980 |
|
SU892635A1 |
| Устройство для измерения межклетевых натяжений проката | 1982 |
|
SU1039600A1 |
| Способ автоматического управления электроприводом центрифуги и устройство для его осуществления | 1984 |
|
SU1292842A1 |
| Стенд для испытания тракторов | 1983 |
|
SU1105774A1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1300412A2 |
| Самонастраивающаяся система управления | 1983 |
|
SU1138787A1 |
| Устройство для управления асинхронным электродвигателем | 1989 |
|
SU1663734A1 |
