112
Изобретение относится к механи- зации строительных и мелиоративных работ и может быть использовано в тех случаях, когда необходимо обеспечить заданньш уклон обработки дна траншеи.
Цель изобретения - повышение точности выдерживания уклона дна траншеи с одним рабочим органом.
На фиг.1 представлена принципиаль- :ная схема устройства; на фиг,2 - схе- 1матическое изображение многоковшово- :го. траншеекопателя;
Рабочее оборудование траншеекопа- теля включает рабочий орган 1 с :приводом и верхнюю раму 2, с которой связана дугообразная направляющая 3. I
Центр кривизны направляющей 3 совпадает с центром вращения нижних звез- дочек рабочего органа 1. Ка направляющей 3 закреплена каретка 4 с вертикальной стойкой 5.
Рабочее оборудование траншеекопателя включает также устройство выдер живания заданного уклона дна траншеи с датчиком 6 углового положения, соединенным через преобразующий блок 7 с исполнительным органом 8, Датчик 6 установлен на каретке 4. На стой- ке 5 расположен датчик 9 уклона так, что его ось проходит через центр кривизны направляющей, Исполнитель- ньй орган 8 шарнирно соединен одним концом с верхней рамой 2, а другим - с вертикальной стойкой 5.
Устройство работает следующим образом.
Рабочий орган 1 отрывает траншею на заданную глубину при соответству- ющем угловом положении рабочего органа 1. Изменение глубины траншеи (вследствие неровности рельефа местности и необходимости соблюдать заданный уклон дна траншеи) регулирует ся путем изменения углового положени рабочего органа 1.При этом каретка 4 перемещается по дугообразной на - правляющей 3 с помощью устройства выдерживания заданного угла дна тран- шеи. Стойка 5 занимает вертикальное положение, а поскольку центр кривизн дугообразной направляющей совпадает с осью вращения нижних звездочек рабочего органа, то датчик уклона 9 находится на одной вертикали с осью вращения нижних звездочек и с дуго- образующей кромкой рабочего органа 1 т.е. с центром кривизны направляю5
01
Q
5 0
Q 5 Q 55
632
щей 3. Сигнал датчика 6, соответствующий истинному положению стойки 5,сравнивается в полупроводниковом сравнивающем устройстве преобразующего блока 7 с сигналом задатчика, соответст- вуюир1м требуемому положению стойки. В том случае, если эта разница пре- вьш1ает зону нечувствительности системы, усилитель включает электрогидравлический распределитель исполнительного органа 8, который приводит в действие исполнительный орган 8, перемещающий каретку 4 со стойкой 5 в направлении устранения рассогласования сигналов датчика и задатчика.
На фиг.2 схематично представлен многоковшовый траншеекопатель с датчиком 9 уклона, шарнирно подвешенный в точке О на кронштейне, жестко закрепленном на верхней раме 2 рабочего органа. Расстояние от точки О до центра вращения нижних звездочек ОА ОА ОА - величина постоянная (конструктивная постоянная).Если центр вращения нижних звездочек,соответствующий точек А, лежит на одной вертикали, проходящей через точку О подвеса датчика, то статическая ошибка регулирования уклона дна траншеи равна нулю. При других условиях положения рабочего органа,когда центр вращения нижних звездочек находится в точках А или А, возникают статические ошибки регулирования.
Линия дна траншеи в идеальном случае должна . быть параллельна линии копира 10. При этом расстояние от копира до дна траншеи, измеренное по вертикали, называемое постоянная выемка К, постоянно.
На фиг.2 это расстояние равно
К (OA sin е- а + R) ,
где а - расстояние от точки подвески датчика О до копира: а const - (конструктивная постоянная).
f - угол между .пинией, соединяющей точки подвеса датчика О и центром вращения, нижних звездочек А и линией, параллельной копиру (дну), проходящей через центр вращения нижних звездочек; R - радиус траектории днообра- зующей режущей кромки ковшей рабочего органа.
31
Поскольку расстояние ОА, а, R постоянные
величины, а Г +W
2 - ук
(где й1 j. - угол уклона дна траншеи; знак перед ( зависит от направления уклона) - также величина постоянная, то К const.
Следовательно, линия дна параллельна линии копира,.т.е. прокладка дна траншеи проходит без ошибок.
На фиг.2 сделано построение положения рабочего органа, когда центр вращения нижних зве:здочек находится в положениях Аи А„. При этом , , а датчик уклона находится на линии копира. Очевидно существует множество положений рабочего органа, когда . .
При этом расстояние по вертикали от копира до дна траншеи равно К . (OA-sing - а + R), т.е. всегда разное.
Ошибка регулирования в общем случае равна
лК К - К; ОА (sine-sin ;).
Таким образом, единственно возможным положением рабочего органа, при котором не возникает статических ошибок регулирования, является такое при котором датчик уклона и центр вращения нижних звездочек ковшовой цепи лежат на одной вертикали. Дат- чик уклона всегда находится на одной вертикали с центром вращения нижних звездочек ковшового рабочего органа.
Следовательно, статическая ошибка регулирования равна нулю.
Дугообразная направляющая, по которой перемещается каретка с вертикальной стойкой, выполнена так, что центр кривизны совпадает с центром вращения нижних звездочек, а датчик расположен на вертикали, проходящей через центр кривизны направляющей.
801634
Направляющая является дугой окружности, так как имеет один центр кривизны, совпадающий с центром вращения нижних звездочек многоковшового
5 рабочего органа.
Следовательно, эта вертикаль является нормалью к дугообразной направляющей (нормаль к кривой всегда проходит через центр кривизны).
О Изменение углового положения рабочего органа при прокладке траншеи приводит к отклонению этой нормали от вертикального положения. Однако система стабилизации углового поло 5 жения стойки автоматически поддерживает эту нормаль в вертикальном положении. Следовательно, датчик уклона всегда будет находиться на вертикали (и нормали к направляющей),
20 проходящей через центр вращения нижних звездочек, что приведет к исключению статической ошибки регулирования.
Формула изобретения
Рабочее оборудование траншеекопателя, содержащее рабочий орган с приводом и верхней рамой, устройство выдерживания заданного уклона дна траншеи, отличающееся тем, что, с целью повышения точности выдерживания заданного уклона дна траншеи с одним рабочим органом траншеекопателя, рабочее оборудование снабжено кареткой с вертикальной стойкой, датчиком уклона и дугообразной направляющей, жестко связанной с верхней рамой рабочего органа, центр кривизны направляющей совпадает с центром вращения нижних звездочек рабочего органа, а датчик уклона расположен на вертикальной стойке, так,что его ось проходит через центр кривизны направля кицей, при этом каретка установлена с возможностью перемещения по дугообразной направляющей.
«NJ rvi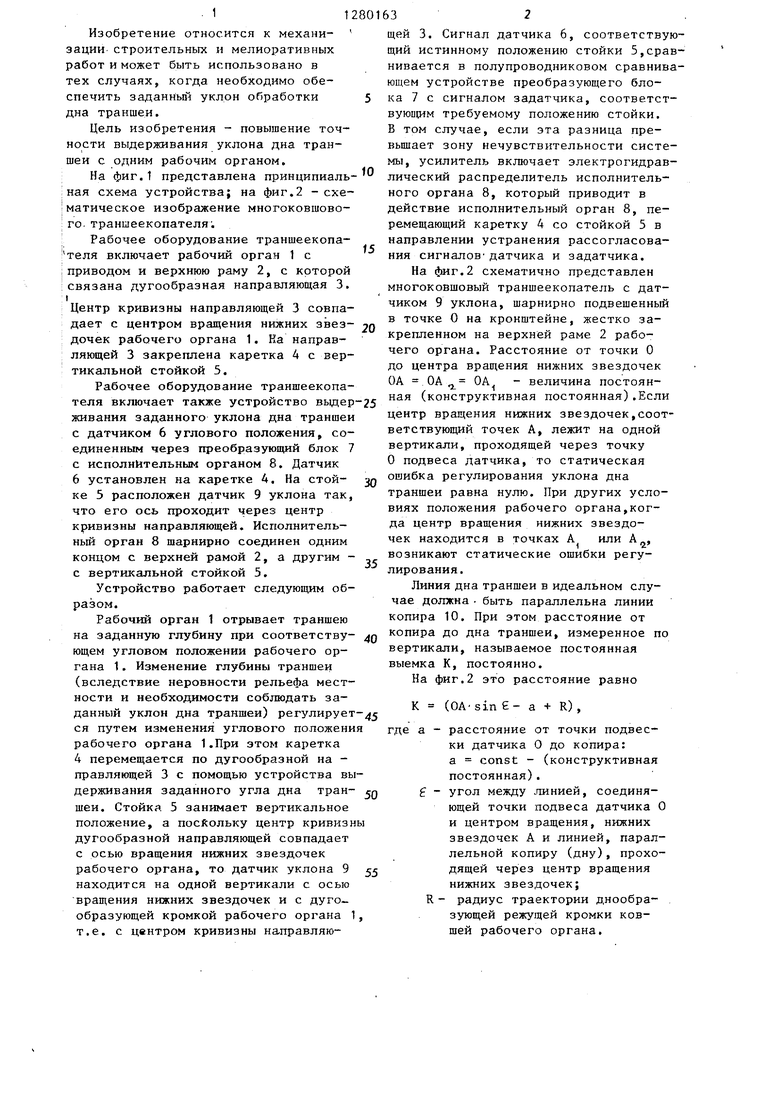
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНШЕЕКОПАТЕЛЬ | 2015 |
|
RU2592288C1 |
| Датчик глубины копания землеройной машины непрерывного действия | 1978 |
|
SU740903A1 |
| ТРАНШЕЕКОПАТЕЛЬ | 2009 |
|
RU2398074C1 |
| ПЛАВУЧЕ-ШАГАЮЩИЙ ДОННЫЙ АППАРАТ | 2001 |
|
RU2214940C2 |
| Устройство для нивелировки и зачистки дна траншеи, например к многоковшовому экскаватору | 1960 |
|
SU133692A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ТРАНШЕЕКОПАТЕЛЯ | 1991 |
|
RU2047691C1 |
| ЭКСКАВАТОРНОЕ УСТРОЙСТВО И ЭКСКАВАТОРНОЕ УСТРОЙСТВО ДЛЯ ИСПОЛЬЗОВАНИЯ С ТЯГАЧОМ | 1994 |
|
RU2131497C1 |
| Устройство для автоматического поддержания заданного уклона дна траншеи к траншеекопателю | 1973 |
|
SU520432A1 |
| Машина для устройства траншей | 1984 |
|
SU1162913A1 |
| Струговый траншеекопатель | 1985 |
|
SU1263749A1 |
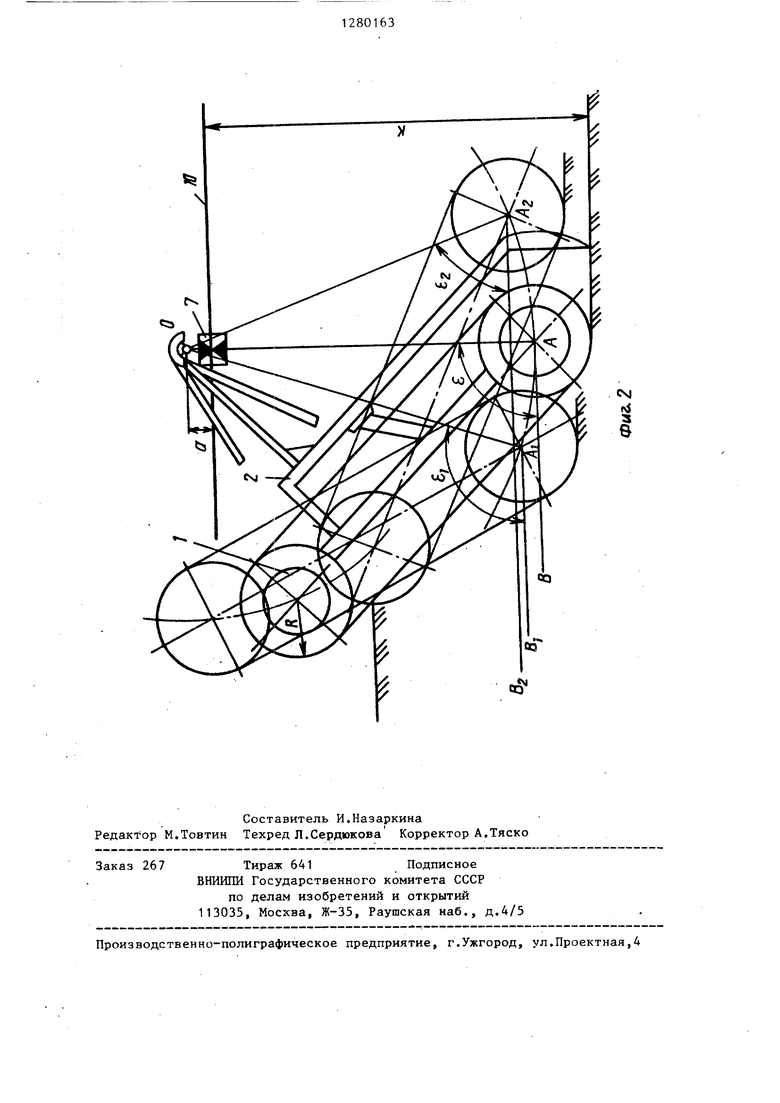
Изобретение относится к механизации строительных и мелиоративных работ и позволяет с высокой точностью выдерживать уклон дна траншеи с одним рабочим органом (РО). Оборудование включает РО 1 с приводом и верхнюю раму 2. С ней жестко связана дугообразная направляющая (ДН) 3. Ее центр кривизны совпадает с центром вращения нижних звездоч гк РО 1. На ДН 3 установлена каретка 4 с вертикальной стойкой (ВС) 5,на которой расположен датчик 9 уклона. Его ось проходит через центр кривизны ДН 3. Каретка 4 перемещается по ДН 3 с помощью устр-ва вьщержива- ния заданного угла дна траншеи.Оно включает установленньш на каретке датчик 6 углового положения ВС 5, соединенный через преобразующий блок 7 с исполнительным органом 8. Изменение углового положения РО 1 приводит к отклонению ВС 5, являющейся нормалью к ДН 3. Сигнал положения ВС 5 с датчика 6 сравнивается в блоке 7с заданным и по сигналу рассогласования ВС 5 возвращается в вертикальное положение и датчик 9 всегда находится на вертикали, проходящей через центр вращения нижних звездочек. Это исключает статическую ошибку регулирования. 2 ил. с 1C (Л ю 00 г№ ff /// f/f
| Мелиоративные машины./ Под ред | |||
| И.Н.Мера - М.: Колос, 1980, с.92, 96, 224 | |||
| Рабочее оборудование траншеекопателя | 1973 |
|
SU483496A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
