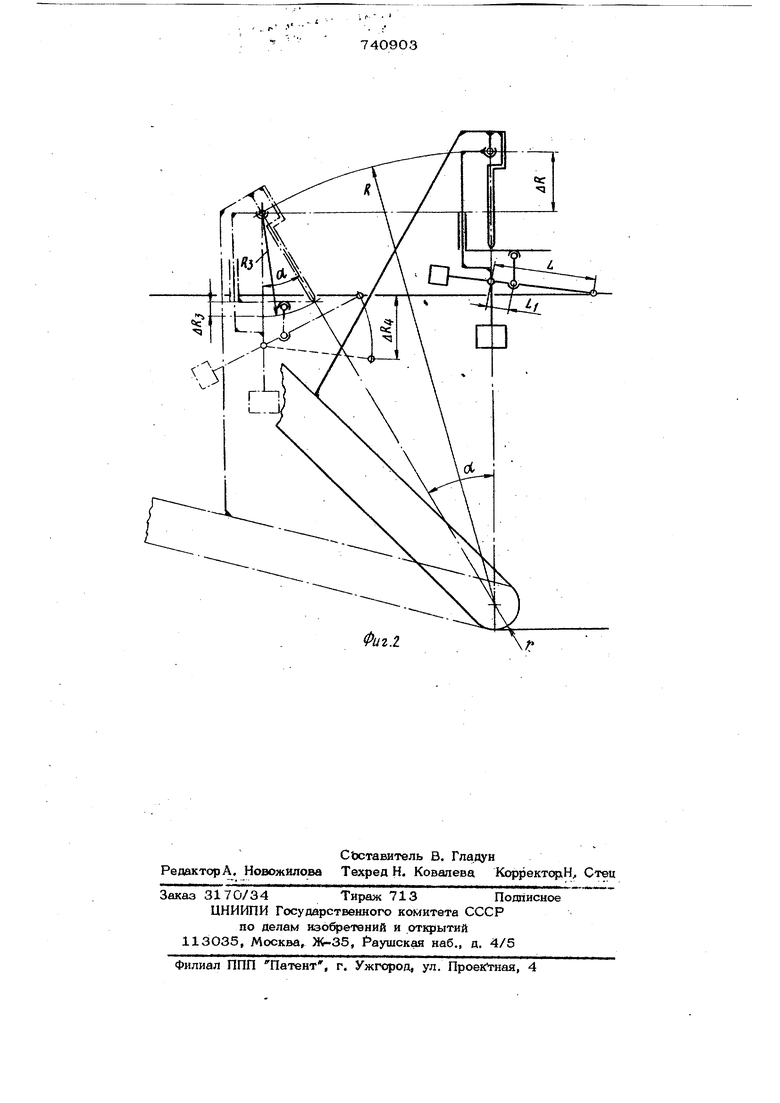
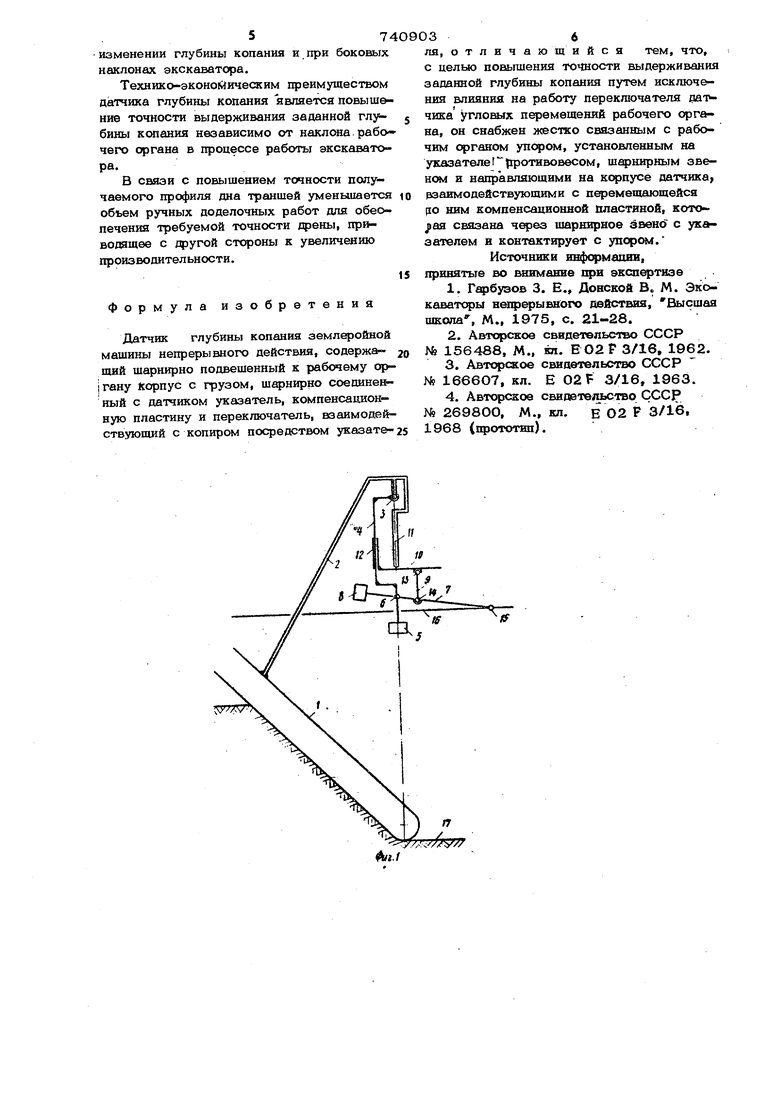
Предлагаемое изобретение относится к землеройный машинам непрерывного дей ствия, преимущественно к траншейным экс каваторам, предназначенным для рытья траншей с заданным уклоном. Известны траншейные экскаваторы,преа назначенные для рытья траншей с заданны уклоном, у которых уклон задается (цатянутый на колышках трос, пуч лазера и т.п.). Указанные траншейные экокаваторы имеют автоматические следящие системы, предназначенные для обеспече ния движения режущей кромки ковшей рабочего органа экскаватора на постоянном расстоянии (по вертикали) от копира. В следящую систему ЕОСОДИТ датчик глубины копания, установленный на рабочем органе экскаватора. Датчик через указатель (щуп) связан с копиром. Датчики передел ют сигналы электро-гиправлической ис- : полнительной системе с целью поддержания рабочего органа на нужной глубине ропания ll. Из-за н сяв ностей поверхности почвы и заданного изменения глубины ксшания вдоль трассы (заданный уклон дна траншеи/, изменяется в npraiecce рытья траншей наклон рабочего сфгана как в продолъгном, так и в поперечном направлениях. В результате этого расстояние от точки подвески датчика до дна траншей в вертикальном ншфавлении изменяется, т.е. получается отхлонение (ошибка) фактического щюфиля дна траншей от заданного кс«ирам. Известен датчик, кoтqpый имеет компенсатор продолыяых отклонений, выполненный в виде коленчатого щупа, имеющий возможность поворота вокруг продольнойи поп&речной к направленшо движения экскаватора осей и механически связан с кронштейна, жестко прикрепленным к щупу рычагом и тягой, соединенной с ним и с кронштейном с помощью шарниров 2. Недостатками этого датчика являются неспособность компенсации бсясовых (поперечных) отклонений (ошибок), высокая точность из374готовления фигурных рычага и тяги и раоположение шарниров, влияние люфтов в шар нирах на точность работы датчика, неудобство и трудоемкость регулировки датчика в эксплуатации. Известен датчик, Б котором с целые уменьшения )федного влияния бокового наклона экскаватора на точность глубины копания, к его подвеске шарнирно прикреплен рычаг, нижний конец которого шарнир но соединен с концом секторного рычага, установленного на шарнире в да-гчика и воздействующего на укрепленную в том же корпусе при псямющн плоской пружины скобу с электроконтактами, взаимодействующими с коленчатым щупам . Недостатками данного датчика кроме некоторых, указанных выше, является зна- чительная чувствительность отЕЛОнения положения самого щупа от горвзсшталв. При этом величина ошибок сильно завнсит от колебания расстояния датчика и самого экскаватора от копирногч) троса при движении вдоль трассы. Наиболее близким техническим решением является датчик глубины ксаханщн земле ройной машины непрерывного действия, со держащий подвешенный к рабочему органу корпус с грузом, шарннрно соединенный с датчиком указатель, компвг сационную пластину и переключатель, ваа имодействующий с копиром посредством указателя f4. Недостатком прототипа SB™ ляехся то, что ошибка от иаклсжа го органа как в продольном, -так и боковом направлениях компенсируется не ПОПНОСТЕЙО Целью изобретения является понышенае точности выдерживания заданной глубины копания путем исключения влияния на работу переключателя датчика угловых п еметцений рабочего органа. Достигается эта цель тем, что датчик снабжен жестко связанными с рабочим .ганом упорам, установленным на ужазателё противовесом, шарнирным звеном и уста новленными на корпусе {щтчика направляю щими, взаимодействующими с перемещаю щейся по ним компенсацисяшойГ пластиной, которая связана через шарнирное звено с указателем и контактирует с упорсил. На фиг. 1 представлена С8:еь а датчика; на фиг. 2 - схема компенсапии дшиб-( ки. К рабочему органу 1 noqoeacTBOM кров штейна 2 на шарнира 3 крепится корпус дат : чика 4, котсфый грузом 5 поддерживается в вертикальном положении. 3 На шарнире 6 к корпусу датчика 4 крепится указатель 7, который, поворачивав ясь под действием противовеса 8 через шарнирное звено 9 поддерживает компенсационную пластину 10 в постоянном контакте с жестэсо соединенным с рабочим органом упором 11. Корпус датчика 4 имеет направляющие 12, по которым компенсационная пластина 10 имеет возможность вертикального перемещения. Шарнирное звено 9 крепи-рея к указателю 7 и компенсационной пластине 10 шарнирами 13 и 14. На конце указателя 7 имеется переключатель 15, реагирующий на вертикальные отклонения относительно копира 16. Копиром 16 задается глубина и уклон дна траншеи 17. Датчик работает следующим образом. Копир устанавливается над поверхноотью земли на строго определенном рассто янни по вертикали относительно проектного дна -траншей. Датчик же поддерживает конец указателя 7 независимо от наклона рабочего органа на постоянном расстоянии по вертикали от дна траншеи 17. Например, при уменьшении глубины копашш расстояние от дна траншей 17 до шарнира подвески датчика 4 уменьшается Бсл9дстга1е увеличения углаЬС наклона ра-. бочего органа 1 относительно вертикали. При этом упор 11 поворачивается вместе с рабочим фганом 1, что приводит к умень шенвю вертикальней проекции упора 11. На величину уменьшения вертикалыюй проекции упора 11 перемещается иверх по напра&лшощим 12 компенсационная пластша 1О. Перемещение вверх компенсационной пластины 10 происходит под действием, груза противовеса 8, поворачивающего указатель 7, с передачей усилия через шарнирное звено 12. При этом конец указателя 7 поднимается вверх на величину сэдуск ииа шарнира подвески датчика 4, т.е. расстояние от конца указателя 7 до дна траншей 17 не озменяется вследствие уменьшения глубины копания. Аналогичнопроисходит компенсация от клсшений при увеличении глубины ксшания и 1ФИ боковых наклонах. Таким образом, каждому углу наклона рабочего органа 1 соответствует определенный угол наклона упора 11, определенное расстояние от компенсационной пластины 1О до шарнира 3 и определенный угол поворота указателя 7, чем обеспечивается постоянное расстояние по вертикали от конца указателя 7 до дна траншей 17 при
изменении глубины копания и при боковых наклонах экскаватора.
Технико-эконокйическим гфеимуществом датчика глубины копания является повыш&ние точности выдерживания заданной глубины копания независимо от наклсжа органа в процессе работы экскаватора.
В связи с повышением точности получаемого профиля дна траншей уменьшается объем ручных доделочных работ для обеспечения требуемой точности дрены, приводящее с другой стороны к увеличению производител ьности.
формула изобретения
Датчик глубины копания землеройной машины непрерывного действия, содержапшй шарнирно подвешенный к рабочему Корпус с грузом, шарнирно соепинеиный с датчиком указатель, компенсационную пластину и переключатель, взаимодей ствуюший с копиром посредством указате-
ля, отличающийся тем, что, с целью повышения точности выдерживания заданной глубины копания путем исключения влияния на работу переключателя датчика УГЛОВЫХ перемещений рабочего органа, он снабжен жестко связанным с рабочим органом упором, установленным на указателе (противовесом, шарннрньтм звенам и направляющими на корпусе датчика, аимодействуюшими с перемещающейся IO ним компенсационной Пластиной, которая связана через шарнирное звено с указателем и контактирует с упором.
Источники ИЕфсфмацнв, принятые во внимание экспертизе
1.Г буэов 3. Е., Донской В. М. Экокаваторы непр ывного пействия, Высшая школа , М., 1975, с. 21-28.
2. свидетельство СССР
№ 156488, М., кл. ЕО2Р 3/16, 1962,
3.Автс ское свидетельство СССР № 166607, кл. Е O2F 3/16, 1963.
4.Авторское свидетельство СССР № 2698ОО, М., кл. Е О2 F 3/16, 1968 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ГЛУБИНЫ КОПАНИЯ РАБОЧЕГО ОРГАНА ТРАНШЕЙНОГО ЭКСКАВАТОРА | 1970 |
|
SU269800A1 |
| Датчик глубины копания рабочего органа дреноукладчика (его варианты) | 1981 |
|
SU1068580A1 |
| Многоковшовый траншейный экскаватор | 1961 |
|
SU144441A1 |
| Датчик глубины копания | 1974 |
|
SU560031A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГЛУБИНЫ КОПАНИЯ К МНОГОКОВШОВОМУ ЭКСКАВАТОРУ | 1965 |
|
SU168192A1 |
| Устройство для определения глубины копания одноковшовым экскаватором | 1983 |
|
SU1139965A1 |
| Дреноукладчик | 2023 |
|
RU2810925C1 |
| Рабочее оборудование экскаватора | 1974 |
|
SU868010A1 |
| ТРАНШЕЕКОПАТЕЛЬ | 2015 |
|
RU2592288C1 |
| Траншейный экскаватор | 1976 |
|
SU658237A1 |