Настоящее изобретение относится к усовершенствованиям в устройствах для выемки грунта. Конкретно, устройство для выемки грунта включает трактор с выступающим от него средством для выкапывания грунта, которое может качаться относительно этого трактора с целью изменения глубины выемки.
Устройство для выемки грунта с поворотной стрелой используется для рытья траншей и т.п. Известно также подобное устройство с вмонтированной системой регулирования глубины копания, с помощью которого регулируется глубина траншеи согласно опорному сигналу, такому, например, как лазерный луч.
Подразумевается, что регулируется угловое положение режущей стрелы относительно трактора и, следовательно, глубина вырытой траншеи с учетом положения, при котором опорный сигнал попадает на сенсорную установку. Сенсорная установка крепится на режущей стреле таким образом, что она движется вместе со стрелой по мере качания последней. Так, когда трактор проходит по неровному участку, датчик движется относительно лазерного луча и это меняет положение, при котором лазерный луч попадает на датчик.
Это вызывает изменение выходного сигнала датчика и это изменение используется для регулирования качательного движения режущей стрелы и изменения таким образом глубины траншеи во время движения трактора по неровному участку. С помощью этого приспособления вырывается траншея, дно которой проходит по параллельной опорному лучу плоскости.
Однако известное устройство имеет недостаток, который заключается в том, что точность глубины траншеи сильно ограничена, когда трактор движется по участку с переменным рельефом и, следовательно, когда режущая стрела должна поворачиваться. В подобных случаях основание вырытой траншеи не параллельно опорному сигналу.
Особенно возникают проблемы в том случае, когда дно траншеи должно находиться на определенном уровне, т.е. в том случае, когда нельзя допускать никаких неровностей дна траншеи или когда эти изменения должны быть минимальными. Это требование, в частности, возрастает в том случае, когда трубопровод или любая другая структура, которая закладывается в траншею, должна быть уложена на гладкую и ровную поверхность.
С использованием известного устройства возникает проблема, связанная с неточностью вращения режущей стрелы, контролируемого изменением положения, при котором опорный сигнал попадает на датчик, закрепленный на движущейся режущей стреле. Изменение углового положения режущей стрелы относительно трактора не отражает точно изменение положения, при котором опорный лазерный луч падает на сенсорную установку.
В патенте США N 4034490 описано экскаваторное устройство, содержащее тягач, имеющий средство для выкапывания для рытья траншеи с дном, по существу параллельным опорному сигналу. Средство для выкапывания содержит траншейный экскаватор с бесконечной цепью и опорный сигнал обеспечивается вращающимся лазерным лучом L. Устройство имеет сенсорное средство для выявления опорного сигнала и средство для выкапывания установлено с возможность поворота относительно тягача, что позволяет изменять глубину траншеи в ответ на управляющие сигналы, генерируемые сенсорным средством. Сенсорное средство установлено на мачте, которая установлена на подрамнике средства для выкапывания. Устройство имеет датчик определения положения, сформированное маятником и раскосом тяг, для определения движения сенсорного средства вне нужной угловой позиции относительно опорного сигнала и для передвижения сенсорного средства относительно средства для выкапывания для возвращения сенсорного средства в указанную нужную позицию при повороте средства для выкапывания. В одном воплощении основание мачты движется в дугообразной криволинейной прорези, предназначенной для обеспечения регулировки высоты сенсорного средства.
Настоящее изобретение предлагает устройство для выемки грунта, отличающееся некоторыми преимуществами по сравнению с известным устройством. В частности, настоящее изобретение описывает устройство для функционирования в зависимости от опорного сигнала с большей степенью точности, чем известно в настоящее время.
Согласно одному аспекту настоящего изобретения, описано экскаваторное устройство для выемки грунта, содержащее тягач со средствами для выкапывания грунта при рытье траншеи, дно которой должно быть по существу параллельно опорному сигналу, при этом средство для выкапывания имеет множество режущих инструментов, которые на самом нижнем участке этого средства движутся по траектории, проходящей вокруг вращающегося элемента в конце указанного средства для выкапывания, удаленного от тягача, причем указанное устройство имеет сенсорное средство для выявления указанного опорного сигнала и указанное средство для выкапывания установлено с возможностью качания относительно тягача с целью изменения глубины указанной траншеи, при этом указанное сенсорное средство является подвижным относительно указанного средства для выкапывания и устройство включает датчик определения положения для определения движения сенсорного средства вне нужной угловой позиции относительно опорного сигнала и для передвижения сенсорного средства относительно указанного средства для выкапывания для возвращения сенсорного средства в указанную нужную угловую позицию, отличающееся тем, что устройство включает средство, определяющее траекторию движения указанного сенсорного средства относительно указанного средства для выкапывания как дугообразную траекторию, имеющую центр кривизны в области оси вращения указанного вращающегося элемента указанного средства для выкапывания, так что когда качается средство для выкапывания, указанное сенсорное средство движется относительно указанного тягача по траектории, которая по существу является такой же по направлению и расстоянию, как траектория движения относительно указанного тягача самой нижней поверхности указанного средства для выкапывания.
Следовательно, преимущество данного изобретения заключается в том, что любое изменение самой низкой поверхности выемки грунта, т.е. режущей поверхности выкапывающего грунт средства, которая вынимает грунт со дна траншеи, относительно трактора, вызывает соответствующее изменение в положении датчика.
Первичный двигатель представляет собой любой соответствующий вид трактора или тягача.
Согласно другому аспекту настоящего изобретения описано экскаваторное устройство для использования с тягачом, содержащее средство для выкапывания грунта при рытье траншеи, дно которой должно быть по существу параллельно опорному сигналу, средство крепления для установки средства для выкапывания на тягаче в действии, причем средство для выкапывания имеет множество режущих инструментов, которые на самом нижнем участке средства для выкапывания движутся по траектории, проходящей вокруг вращающегося элемента в конце указанного средства для выкапывания, удаленном от средства крепления, при этом устройство имеет сенсорное средство для выявления указанного опорного сигнала и указанное средство для выкапывания установлено с возможностью качания относительно указанного средства крепления с целью изменения глубины указанной траншеи, при этом указанное сенсорное средство является подвижным относительно указанного средства для выкапывания и устройство включает датчик определения положения для определения движения сенсорного средства вне нужной угловой позиции относительно опорного сигнала и для передвижения сенсорного средства относительно указанного средства для выкапывания для возвращения сенсорного средства в указанную нужную угловую позицию, отличающееся тем, что устройство включает средство, определяющее траекторию движения указанного сенсорного средства относительно указанного средства для выкапывания как дугообразную траекторию, имеющую центр кривизны в области оси вращения указанного вращающегося элемента указанного средства для выкапывания, так что, когда в действии указанное средство для выкапывания качается, указанное сенсорное средство движется относительно указанного средства крепления по траектории, которая по существу является такой же по направлению и расстоянию, как и траектория движения относительно указанного средства крепления самой нижней поверхности указанного средства для выкапывания.
Регулирование движения датчика таким образом имеет особое преимущество, которое заключается в том, что расстояние между датчиком и самой нижней поверхностью средства для выкапывания остается по существу постоянным во время качательного движения этого средства. Следовательно, независимо от углового положения поворотного вынимающего грунт средства относительно трактора разнос между самой низкой поверхностью средства для выкапывания и датчиком, а следовательно, и опорным сигналом, остается по существу постоянным.
В соответствии с этим, по мере того, как трактор движется по неровному участку, средство для выкапывания грунта качается таким образом, чтобы компенсировать неровности поверхности и в результате этого удержать дно траншеи по существу параллельным опорному сигналу.
Наибольшее преимущество заключается в том, что средство для выкапывания грунта содержит множество режущих инструментов, которые на самом нижнем участке этого средства проходят по фактически круговому или по меньшей мере полукруговому пути. Центр кривизны этого дугообразного пути, по которому должен двигаться датчик, может преимущественно соответствовать центру кривизны этой круговой или по меньшей мере полукруговой траектории режущих инструментов.
В частности, круговая или по меньшей мере полукруговая траектория режущих инструментов может быть определена вращающимся элементом. Центр кривизны дугообразной траектории датчика располагается таким образом, что он соответствует оси вращения этого вращающегося элемента.
В некоторых случаях вращающийся элемент может включать круговой режущий элемент. Альтернативно вращающийся элемент может включать зубчатое колесо без самостоятельного привода, которое устроено таким образом, что оно может вращаться и нести режущую цепь.
Когда режущие инструменты располагаются таким образом, что они могут проходить по круговой или по меньшей мере полукруговой траектории, самая нижняя поверхность вынимающего грунт средства, т.е. самая нижняя поверхность режущих инструментов, остается на одном и том же расстоянии от центра кривизны этой круговой или полукруговой траектории независимо от угла средства для выкапывания грунта относительно трактора.
Следовательно, так как центр кривизны дугообразной траектории совпадает с центром кривизны траектории движения режущих инструментов, т.е. с осью вращения роторного элемента, такое расположение является особенно эффективным при поддержании необходимого разнесения между датчиком и самой нижней поверхностью средства для выкапывания грунта.
Предпочтительно датчик может двигаться по необходимому пути с помощью приводного средства, например электрического, гидравлического или пневматического.
В самом выгодном и простом варианте исполнения изобретения датчик крепится на средство для выкапывания грунта. В частности, датчик крепится на средство для выкапывания грунта с помощью опорного элемента, который может включать мачту для крепления датчика выше самой верхней части трактора.
Предпочтительно опорное средство для датчика крепится на вынимающем грунт средстве для движения по треку, который выступает от средства для выкапывания грунта. В таком случае трек может преимущественно выступать дугообразным образом, что соответствует дуге, по которой должен двигаться датчик.
Наличие такого дугообразного трека представляет собой преимущество, так как обеспечивает простое и эффективное средство для движения датчика по нужной траектории. Согласно этому трек проходит по дугообразной траектории, центр кривизны которой находится в нужном положении в нижней части средства для выкапывания грунта.
В соответствии с этим изобретение описывает дугообразный трек и сенсорное опорное средство, которое крепится таким образом, что оно может двигаться по этому треку.
Предпочтительно для регулирования движения датчика по указанной траектории предусмотрены контрольные средства, соединенные со средством для выявления изменения положения трактора относительно опорного сигнала.
В этом случае контрольные средства могут включать детектор уровня для выявления того момента, когда трактор движется вверх или вниз по неровностям поверхности.
Действительно, если выгодно удерживать датчик и, в частности, соединенную с ним мачту фактически перпендикулярно к опорному сигналу, то может быть предусмотрено сенсорное средство для определения уровня с целью удерживания датчика в такой перпендикулярной зависимости с опорным сигналом.
В особенно выгодном варианте исполнения изобретения, когда датчик определения уровня обнаружит, что из-за движения трактора вверх или вниз и/или из-за вращательного движения вынимающего грунт средства датчик больше не перпендикулярен опорному лучу, могут быть приведены в действие приводные средства для того, чтобы заставить датчик двигаться по дугообразной траектории.
Другое преимущество и особенно упрошенная операция могут иметь место в том случае, если несущее датчик средство, например мачта, выступает в направлении радиуса кривизны дугообразной траектории движения датчика. Так независимо от положения датчика на его возможной дугообразной траектории несущее датчик средство выступает в радиальном направлении таким образом, что движение датчика по его радиальной траектории с целью возвращения датчика в положение, которое по существу перпендикулярно опорному лучу, служит для удерживания датчика в положении необходимого разнесения от самой нижней поверхности средства для выкапывания грунта.
Таким образом, когда трактор движется вверх или вниз относительно опорного сигнала, датчик определяет, что средство для выкапывания должно поворачиваться, а датчик определения уровня определяет, что датчик должен следовать по его дугообразной траектории. Когда благодаря сочетанию этого движения опорный сигнал, например лазерный луч, инфракрасный луч или радиосигнал, затем попадает на нужную часть датчика, может быть установлено, что траншея выкапывается с заданной глубиной в соответствии с опорным сигналом.
Настоящее изобретение представляет особое преимущество, которое заключается в том, что не только угол поверхности датчика относительно опорного луча может точно регулироваться, но также положение датчика относительно стрелы может изменяться и регулироваться таким образом, что изменение положения, при котором луч попадает на датчик, точно отражается в соответствующем движении режущей стрелы.
Благодаря наличию дугообразного трека, по которому движется несущая датчик мачта, когда соединенный с мачтой датчик определения уровня обнаруживает, что мачта наклонилась в нужном направлении удлинения, точность глубины копания траншеи может быть также намного повышена с учетом достижимой на данный момент точности.
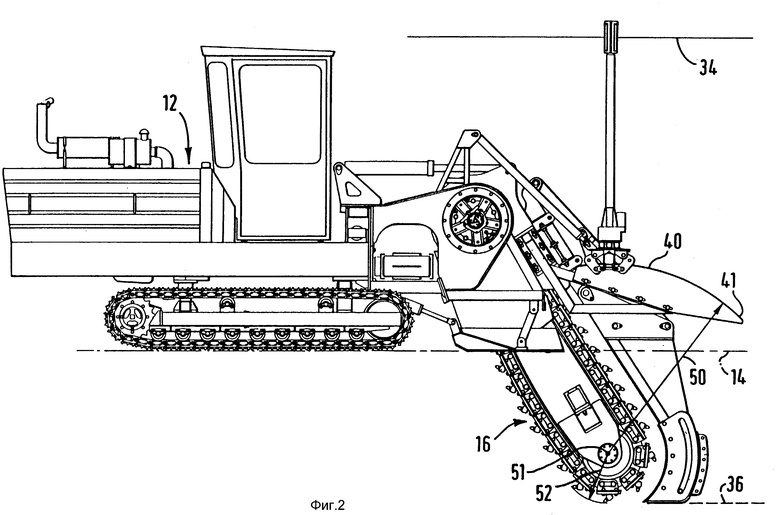
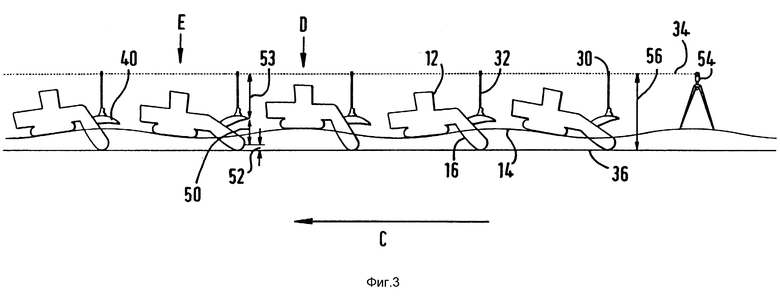
Далее изобретение будет описано со ссылкой на чертежи, приведенные только в качестве примера, на которых на фиг. 1 - вид сбоку экскаватора, выполненного согласно настоящему изобретению, с средством для выкапывания в положении выполнения неглубокой траншеи; на фиг. 2 - вид сбоку экскаватора, изображенного на фиг. 1, но с средством для выкапывания в положении выполнения более глубокой траншеи, чем на фиг. 1; на фиг. 3 - схематичный вид сбоку, изображающий экскаватор на фиг. 1 и 2 во время его движения по участку с переменным рельефом.
На фиг. 1 показан экскаватор 10, выполненный согласно настоящему изобретению. Экскаватор 10 содержит тягач, представляющий собой гусеничный трактор 12 для движения в направлении, показанном стрелкой A, по поверхности 14, в которой должна быть выполнена траншея.
Экскаватор 10 также содержит средство для рытья в грунте, которое представляет собой вращающуюся режущую стрелу 16. Режущая стрела 16 содержит опорную консоль 18, которая крепится в опорном корпусе 19 режущей стрелы и которая может качаться на гусеничном тракторе 12 посредством крепления 20 для движения в направлениях, указанных стрелкой B.
Для вращения режущей стрелы 16 вокруг крепления 20 предусмотрен привод 21. На самом дальнем от гусеничного трактора 12 конце опорной консоли 18 находится зубчатое колесо 22 без самостоятельного привода, а бесконечная режущая цепь 24 располагается таким образом, что она может проходить вокруг зубчатого колеса 22.
Бесконечная режущая цепь 22 содержит множество режущих инструментов, например режущих зубьев 26. Бесконечная режущая цепь 24 также проходит вокруг приводного колеса (на чертежах не показано), которое крепится на конце режущей стрелы 16 рядом с креплением 20.
Экскаватор 10 также содержит сенсорное устройство 28 для регулирования глубины траншеи, представляющее собой датчик 30, установленный наверху мачты 32. Датчик 30 устроен таким образом, что он принимает опорный сигнал, включающий лазерный луч 34, испускаемый лазерным источником (не показано на фиг. 1 и 2). Лазерный луч 34 включает опорный сигнал, который служит эталоном для регулирования глубины траншеи, выкапываемой посредством бесконечной режущей цепи 22 режущей стрелы 16.
Как это показано на фиг. 1, экскаватор 10 предназначен для рытья траншеи на поверхности 14, по которой движется гусеничный трактор 12. Вырытая траншея имеет дно 36. Сенсорное устройство 28 для регулирования глубины выемки служит для поддержания дистанции между опорным лазерным лучом 34 и дном 36 траншеи по существу с постоянным значением.
Следовательно, дно траншеи проходит в плоскости, параллельной опорному лазерному лучу 34. Так как опорный лазерный луч 34 отличается высокой точностью направленности, с помощью экскаватора 10 можно легко вырыть траншею с соответствующими точными параметрами направления.
Следовательно, дно 36 может быть выполнено на нужной глубине ниже опорного луча с высокой степенью точности.
Мачта 32 крепится на мачтоносителе 38. Мачтоноситель 38 закрепляется на дугообразном треке 40 и движется между двумя крайними концами 41, 43 трека 40. Трек 40 содержит фланец, выполненный на дугообразной кромке удлинительного щита 45. Удлинительный щит 45 жестко крепится на режущей стреле 16 с помощью опорных консолей 47.
Опорные консоли 47 прикрепляются к опорному корпусу 19 режущей стрелы посредством соединительной пластины 57. С помощью соединительной пластины 57 можно регулировать положение опорных консолей 47 и, следовательно, трека 40 при любом удлинении режущей стрелы 16, которое необходимо, например, для компенсации износа режущей цепи 24.
Таким образом сохраняется постоянное расстояние 50 (см. фиг. 2). Мачтоноситель 38 крепится подвижно на треке 40 с помощью четырех направляющих колес (на чертежах не показаны), соединенных с мачтоносителем 38 вращающимся образом посредством четырех соответствующих осей 44.
Кроме того, мачтоноситель 38 включает датчик 46 уровня, который определяет, когда мачта 32 отклоняется от своего фактически вертикального положения, изображенного на фиг. 1, а также от фактически перпендикулярного положения относительно опорного лазерного луча 34, представленного на фиг. 1 и 2.
Предусмотрена траверса 48 с гидравлическим приводом для передвижения мачты 32 и датчика 30 путем передвижения мачтоносителя 38 по определенной треком 40 аркообразной траектории.
Как представлено на фиг. 2, изображенный на фиг. 1 экскаватор показан с режущей стрелой 16, находящейся в угловой позиции относительно гусеничного трактора 12 для рытья траншеи с максимально возможной глубиной от поверхности 14, по которой движется трактор 12. Хотя положение мачты 32 относительно опорного лазерного луча удерживается фактически перпендикулярным, при сравнении фиг. 1 и 2 видно, что мачтоноситель 38 прошел по всей длине трека 40, т.е. от его одного конца 41 (фиг. 1) до его другого конца 43 (фиг. 2).
Как описано ниже, движение мачтоносителя 39 по дугообразному треку 40 служит для того, чтобы удерживать точную дистанцию между датчиком 30 и самой нижней режущей поверхностью режущей стрелы 16. Это в свою очередь служит для того, чтобы удерживать дно 36 траншеи на нужном расстоянии от опорного лазерного луча 34.
Мачта 32 крепится жестким образом на мачтоносителе 38 таким образом, что исключается любое движение между мачтой 32 и мачтоносителем 38. Также, точная траектория, определяемая дугообразным треком 40, имеет центр кривизны, который совпадает с осью 51 вращения зубчатого колеса 22. Таким образом, в каком бы положении на треке 40 ни находился мачтоноситель 38, как это видно на чертежах, мачта 32 всегда будет выступать в радиальном направлении от центра кривизны трека 40, т.е. оси 51 вращения зубчатого колеса 22.
Следовательно, дистанция между осью 51 вращения зубчатого колеса 22 и датчиком 30 будет оставаться постоянной и будет представлять собой сумму радиуса 50 кривизны трека 40 и высоты мачты 32 датчика 30. Так как бесконечная режущая цепь 24 проходит по дугообразной траектории с центром на оси 51 вращения зубчатого колеса 22, расстояние 52 между осью 51 вращения зубчатого колеса 22 и самой нижней режущей поверхностью стрелы 16, т.е. той частью режущей стрелы 16, которая выкапывает самую глубокую часть траншеи, остается постоянным, каким бы ни было угловое соотношение между режущей стрелой 16 и трактором 12.
Так, путем регулирования движения мачтоносителя 38 по треку 40 по мере того, как режущая стрела 16 движется между двумя крайними положениями, показанными на фиг. 1 и 2, разнесение между датчиком 30 и самой нижней режущей поверхностью стрелы 16 может оставаться по существу постоянным. Согласно этому, путем удерживания датчика 30 в таком положении относительно опорного лазерного луча 34, когда последний попадает намеренно на определенную часть датчика 30, дно 36 траншеи может проходить в плоскости, фактически параллельной опорному лазерному лучу 34. Точная направленность опорного луча 34, таким образом, отражается с точностью в гладком и ровном дне 36 траншеи, выполненном на необходимом уровне.
К тому же, благодаря центрированию центра кривизны трека на оси вращения зубчатого колеса 22, экскаватор может быть успешно использован с режущей стрелой, снабженной зубчатым колесом с любым нужным радиусом, требуя только незначительной подгонки.
В соответствии с представленным вариантом, расположенный на мачтоносителе 38 датчик 46 уровня используется для определения того, когда и как далеко мачтоноситель 38 должен продвинуться на треке 49 с целью удерживания необходимого расстояния между датчиком 30 и самой нижней режущей поверхностью режущей стрелы 16 во время вращения стрелы 16.
Например, при анализе движения режущей стрелы 16 от показанного на фиг. 1 положения до положения, показанного на фиг. 2, видно, что такое вращательное движение заставляет мачту 32 наклоняться вправо, как это показано на фиг. 1. Датчик 46 уровня выявляет этот наклон и соответствующее этому наклону движение, направленное от вертикального положения мачты 32, как показано на фиг. 1.
Датчик 46 уровня, который может включать ртутный выключатель, контролирует работу гидравлического приводного рычага 48 таким образом, что мачтоноситель 38 движется влево на фиг. 1. Это движение по дугообразному треку 30 не только уменьшает высоту датчика относительно трактора 12, но также служит для возвращения датчика 30 в его по существу перпендикулярное положение относительно опорного лазерного луча 34.
В результате этого поддерживается необходимая дистанция между самой низкой режущей поверхностью режущей стрелы 16 и датчиком 30. Разумеется датчик 46 уровня служит также для возвращения мечты 32 в ее правильное положение, в котором она фактически перпендикулярна опорному лазерному лучу, как это показано на фиг. 1 и 2.
Изобретение представляет собой преимущество в том случае, когда участок, по которому должен пройти трактор 12, отличается переменным рельефом. В такой ситуации траншея также может быть вырыта с дном 36, фактически параллельным опорному лазерному лучу 34. В этом случае глубина копания траншеи изменяется в зависимости от рельефа участка.
Фиг. 3 представляет собой схему пяти положений экскаватора 10 на фиг. 1 и 2 в момент его движения в направлении стрелки C по поверхности 14 земли с различным рельефом, как показано. Лазерный источник 54 устанавливается таким образом, что он вырабатывает опорный лазерный луч 34, который проходит фактически в горизонтальном направлении.
Разумеется, опорный сигнал может быть направлен под углом таким образом, что дно траншеи имеет соответствующий наклон. Лазерный луч 34 служит в качестве опорного луча так, что дно траншеи 36 выполняется по существу параллельно опорному лучу 34 даже в том случае, если поверхность, по которой проходит трактор 12, изменяется.
Так по мере того, как трактор 12 проходит по поверхности 14, угловое положение режущей стрелы 16 относительно трактора 132 изменяется таким образом, что изменяется глубина копания. Точно так же, так как угловое положение режущей стрелки 16 относительно трактора 12 изменяется, мачта 32 движется по дугообразному треку 40 таким образом, что мачта удерживается фактически в вертикальном положении, как это показано на фиг. 1 и 2, и, следовательно, фактически перпендикулярно к опорному лазерному лучу 34.
Перед работой экскаватор регулируется таким образом, что разнесение между датчиком 30 и самой нижней поверхностью режущей цепи 24, т.е. самой нижней поверхностью режущих зубьев 26, соответствует нужному расстоянию между дном 36 траншеи и опорным лазерным лучом 34. По мере того, как режущая цепь 24 вынимает грунт с нужной глубины, она приводится на эту глубину, и режущая стрела поворачивается, т.е. до тех пор, пока датчик 30 принимает опорный лазерный луч 34.
Датчик 30 затем калибруется таким образом, что положение, при котором лазерный луч 34 попадает на датчик, было бы правильным с учетом нужного уровня дна 36 траншеи. Любое отклонение от этого положения способно заставить режущую стрелу 16 поворачиваться и таким образом компенсировать отклонение в поверхности участка, как описано далее.
Вмонтированный в мачтоноситель 38 датчик 46 уровня служит для регулирования движений мачтоносителя 38, как описано выше со ссылкой на фиг. 1 и 2. Так мачтоноситель 38 движется по треку 40 таким образом, чтобы удерживать необходимое расстояние между датчиком 30 и самой нижней режущей поверхностью режущей стрелы 16.
Действие согласно изобретению конкретно проиллюстрировано со ссылкой на движение трактора 12 между положениями D и E на фиг.3. Когда трактор 12 движется из положения D, он движется вниз, и, следовательно, опорный лазерный луч 34 начинает попадать на более высокую часть датчика 30 по сравнению с той частью, куда он попадал до этого. Это изменение в месте попадания лазерного луча датчика 30 регулируется датчиком 30 и в ответ на это контрольное устройство (не показано) определяет, что трактор движется вниз.
Следовательно, чтобы поддерживать дно 36 траншеи на нужном уровне, контрольное устройство заставляет режущую стрелу 16 поворачиваться в направлении против часовой стрелки. В результате этого поднимается самая нижняя режущая поверхность режущей стрелы 16 относительно трактора. Поворотное движение режущей стрелы 16 продолжается до тех пор, пока вертикальное положение датчика 30 не станет таким, что опорный лазерный луч 34 попадает снова на нужную часть датчика 30.
Это указывает на то, что траншея выполняется с дном 36, находящимся на нужном расстоянии от опорного сигнала 34. С целью поддержания этого необходимого разнесения важно, чтобы расстояние между датчиком 30 и самой нижней режущей поверхностью режущей стрелы 16 оставалось фактически постоянным независимо от углового положения режущей стрелы 16 относительно трактора 12.
Так как трактор 12 начинает двигаться вниз из положения D в положение E, вмонтированный в мачтоноситель 38 датчик 46 уровня инициирует работу гидравлической приводной траверсы 48 с тем, бы двигать мачтоноситель 38 по треку 40 до тех пор, пока датчик 46 уровня не укажет на то, что мачта 32 снова находится в нужном положении. Это нужное положение является таким положением, в котором мачта 32 фактически перпендикулярна опорному лазерному лучу 34, а датчик в этом случае находится на нужном расстоянии от дна 36 траншеи.
Как будет видно, движение мачтоносителя 38 по треку 40 и, следовательно, движение мачты 32 и датчика 30 определяется расстоянием, на которое режущая стрела 16 повернулась относительно трактора 12, чтобы удержать датчик 30 в нужном положении по отношению к лазерному опорному лучу 34. Как будет ясно видно на фиг. 3, это движение служит для точного поддержания необходимого расстояния между датчиком 30 и дном 36 траншеи.
Как показано на фиг. 3, это расстояние включает высоту мачты 53, радиус 50 кривизны дугообразного трека 40 и радиус 52 кривизны полукруговой траектории, по которой движется бесконечная режущая цепь 24 вокруг зубчатого колеса 22. К тому же, так как мачтоноситель 38 проходит вокруг дугообразного трека 40, это расстояние остается постоянным независимо от высоты над дном траншеи, на которой находится в данный момент трактор. Разумеется, трек 40 может быть выполнен в любой пригодной форме, например в виде элемента с дугообразной поверхностью, как представлено на чертеже, или с дугообразной щелью, выполненной в треке.
Несмотря на то, что изобретение представлено со ссылкой на описанные выше конкретные варианты исполнения, возможно осуществить множество модификаций и вариантов в пределах области настоящего изобретения.
Специалисту данной области станет понятно, что движение датчика 30 и мачты 32 может быть вызвано с помощью направляющего контрольного средства, а не с помощью показанного дугообразного трека 40. Особое требование заключается в том, что во время поворотного движения режущей стрелы 16 датчик 30 должен двигаться а том же направлении и на то же расстояние, что и самая низкая режущая поверхность режущей стрелы 16. А также могут быть использованы любые режущие средства на режущей стреле 16, а опорный сигнал может включать инфракрасный луч или радиосигнал.
Кроме того, чтобы допустить любые вариации рельефа в направлении, перпендикулярном продольному направлению траншеи, трактор может быть оборудован компенсирующим боковой наклон средством, доступным в настоящее время. Экскаватор может быть дополнительно снабжен распределительным ящиком, обычно расположенным за режущей стрелой в направлении движения, для засыпания материала, например гравия, или установки оборудования, например участков трубопровода или кабеля, в траншею.
Источники информации:
1. US 4034490 A (LASERPLANE CORPORATION), 12.06.77.
Изобретение относится к землеройной технике, используемой для рытья траншей и т.п. Задачей изобретения является повышение точности глубины копания. Для этого устройство содержит тягач со средством для выкапывания грунта, закрепленным посредством средства для крепления на тягаче с возможностью вращения. При рытье траншеи, глубина которой не зависит от неровностей в поверхности, по которой движется тягач, сенсорное средство крепится на тягаче таким образом, чтобы принимать опорный сигнал. Любое изменение в местоположении, при котором опорный сигнал попадает на сенсорное средство при движении тягача служит для определения угла, под которым средство для выкапывания выступает от тягача и изменения соответственно глубины траншеи. При этом сенсорное средство крепится с возможностью движения относительно средства для выкапывания по дугообразной траектории, определенной дугообразным направляющим средством. Центр кривизны расположен на оси вращения вращающегося элемента средства для выкапывания. 2 с. и 16 з.п. ф-лы. 3 ил.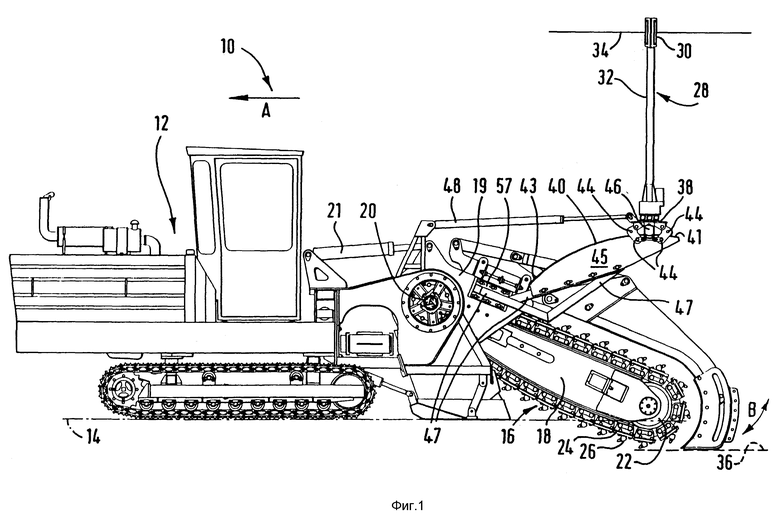
| US 4034490 A, 12.06.77 | |||
| Многоковшовый траншейный экскаватор | 1961 |
|
SU144441A1 |
| УСТРОЙСТВО ДЛЯ ПОДДЕРЖАНИЯ ПОСТОЯННОЙ ГЛУБИНЫ КОПАНИЯ МНОГОКОВШОВОГО ЭКСКАВАТОРА | 0 |
|
SU235650A1 |
| Устройство для автоматического поддержания заданного уклона дна траншеи к траншеекопателю | 1973 |
|
SU520432A1 |
| Устройство для управления траекторией движения рабочего органа экскаватора-траншеекопателя | 1981 |
|
SU968230A1 |
| Машина для рытья траншей | 1986 |
|
SU1375748A1 |
| Устройство автоматического управления дреноукладчиком | 1990 |
|
SU1751278A1 |
| US 4028822 A, 14.06.77 | |||
| US 4050171 A, 27.09.77 | |||
| УСТРОЙСТВО ДЛЯ ПОВОРОТА РАБОЧЕГО ОРГАНА ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1967 |
|
SU214416A1 |

