Системы програ ммиого управления, выполненные в виде мостовой схемы из индуктиазных датчиков и набора соиротивлений, известны.
Отл И Чительная особенность описываемой системы заключается в применеНИИ одвоеяного датчика, лредназначеняого для разделения шага отсчегнаго виита на четыре измеряемых участка. Для набора рззмера Внутри каждого из этих участков, осуществляемого со смещением начала отсчета, служит сопротивление ., включенное в одно из плеч измер ительн его м ОСта.
Этим достигается возможность исключения механизмов перемещения элементов ма-гнйтной. системы при «аборе размера внутри каждого шага отсчетного винта, а также исключения зон нечувствительности, обзсловленных синусоидальной формой сигнала.
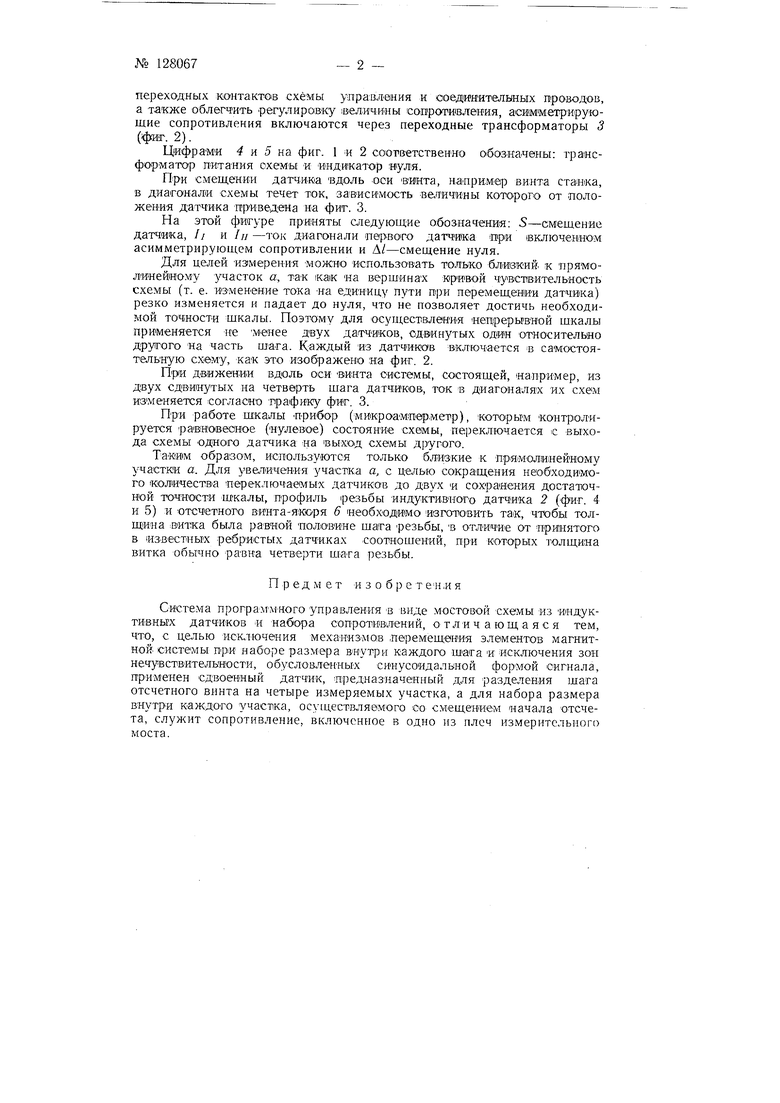
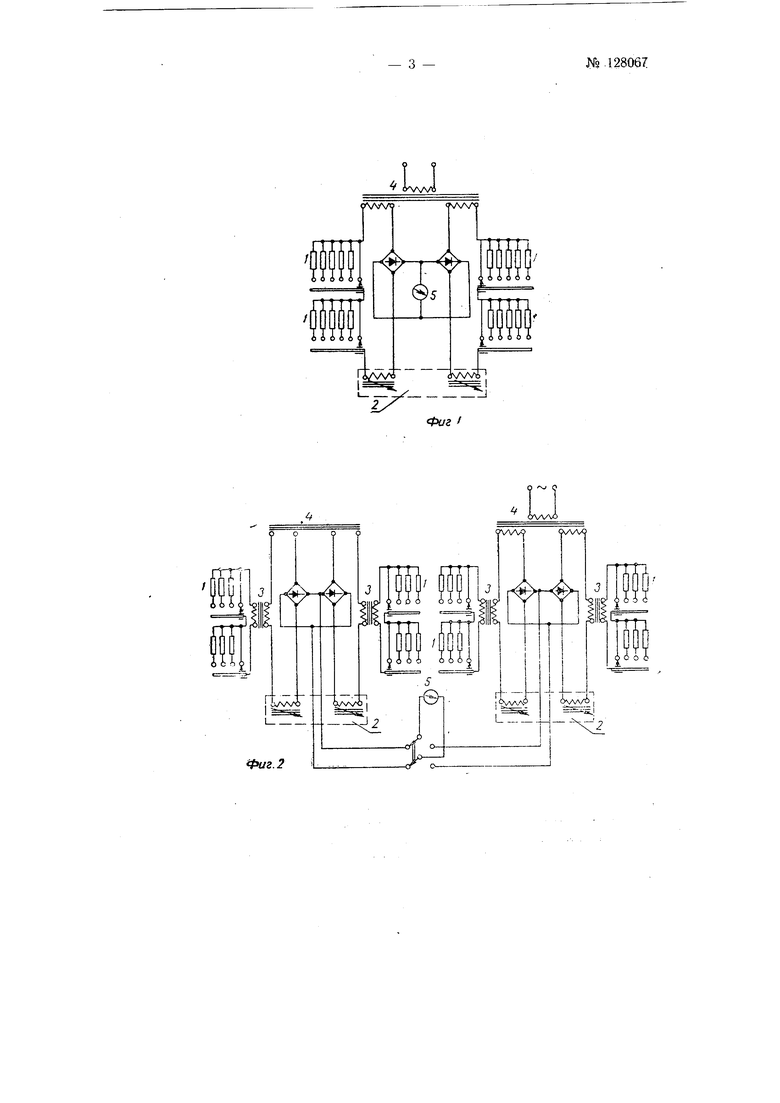
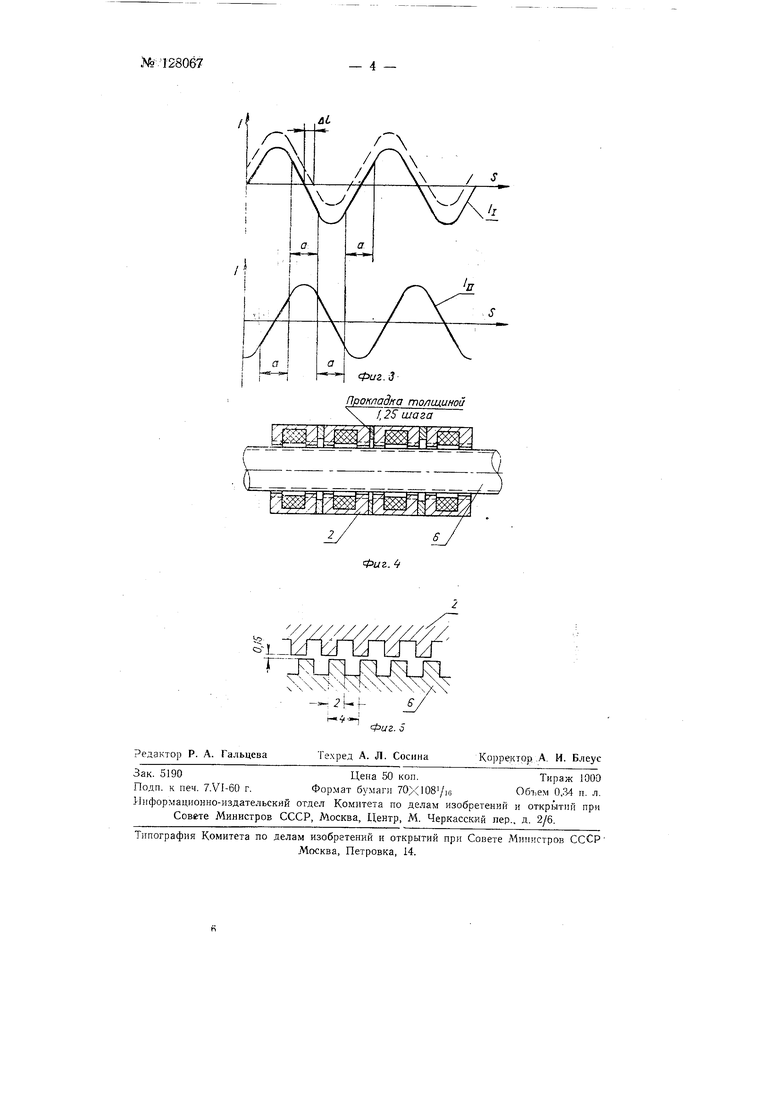
На фиг. 1 и 2 изображены П1жнци;ниа. электрические схемы предложенной системы; на фиг. 3-график за:висимаети величины тока, текущего в диагонали схемы, от положения датчика; на фиг. 4-схема ра1змещения индуктивных датчиков на винте-якоре; фиг. 5-нрофнль резьбы датчика.
В однОМ из плеч схемы описываемой системы включаются омические сопротивления 1 (фиг. 1). При этом ток в одном из полудатчиков уменьшается, и нулевое равновесное состояние схемы смешается на определенную велИЧину, в зависимости от общей Беличины включаемого набора сопротивлений. Для восстановления равновесия схемы при асимметрировании ее со-проти1влениями требуется соответствующее линейное перемещение датчика. Таким образом, включением различных сопротивлений будут определяться (задаваться) различные в е чичины перемен1ений рабочего органа, например рабочего органа станка, на котором жестко закреплен индуктивный датчик 2.
ДоТя того, чтобы иметь возможность оперировать с большими величинами сопротивлений и тем самьтм устранить влияние сопротивления
№ 128067- 2 -
переходных контактов схемы управления и ооедияительных проводов, а также облегчить регулировку величины сопротивления, асимметрирующие сопротивления включаются через переходные трансформаторы 3 (фиг. 2).
Цифрами и 5 на фиг. 1 iи 2 соогветственио обозначены: трансформатор питания охемЫ и нди катор иуля.
При смещении датчика вдоль оси винта, например винта станка, в диагонали схемы течет ток, зависимость величины которого от положения датчика приведена на фиг. 3.
На этой фигуре при1няты следующие обозначения: S-смещение датчика, // и /я -то диагонали первого при (включенном асимметрирующем сопротивлении и А/-смещение нуля.
Для целей из1мереНИя можно использовать только близкий, к прямолинейному участок а, так как на вершинах кривой чувствительность схемы (т. е. изменение тока на единицу пути 0рн перемещении датчика) резко изменяется и падает до нуля, что не позволяет достичь необходимой точности щкалы. Поэтому для осуществления нбП|рерьгвной щкалы применя-ется не -менее двух датчиков, одвинзтых один относительно другого на часть шага. Каждый из датчиков включается iB самостоятельную схему, как это изображено на фиг. 2.
При дв1ижении вдоль оси ВИНта системы, состоящей, например, из двух сдвинутых на четверть щага датчиков, ток в диагоналях их схем нзменяется согласно графику фиг. 3.
При работе шкалы нрИбор (ми1кроампер.метр), которым контролируется равновеаное (нулевое) состояние схемы, переключается с выхода схемы одного датчика па выход схемы другого.
Таким образом, И спользуются только близкие к прямолинейному участки а. Для увафичения участка а, с целью сокращения необходимого кол1ичества переключаемых датчиков до двух и сохранения достаточной точности шкалы, профиль резьбы индуктив1-гого датчика 2 (фиг. 4 и 5) и отсчетного винта-якоря 6 необходимо изготовить TaiK, чтобы толщина витка была равной половине шага резьбы, в отличие от принятого в известных ребристых датчиках соотношений, при которых толщина витка обычно равна четверти шага резьбы.
Предмет и з о б р е т я
Система программного управлен ия в виде мостовой схемы из индуктивных датчиков и набора сопротивлений, отличающаяся тем, что, с целью исключения механиз-мов леремещеиия элементов магнитной системы при наборе размера внутри каждого шага и исключения зон нечувствительности, обусловленны-х синусоидальной формой Сигнала, применен сдвоенный датчик, шредназначенный для разделения 1лага отсчетного винта на четыре измеряемых участка, а для набора размера внутри каждого участка, ос цествляемого оо смещением начала отсчета, служит сопротивление, включенное в одно из плеч измерительного моста.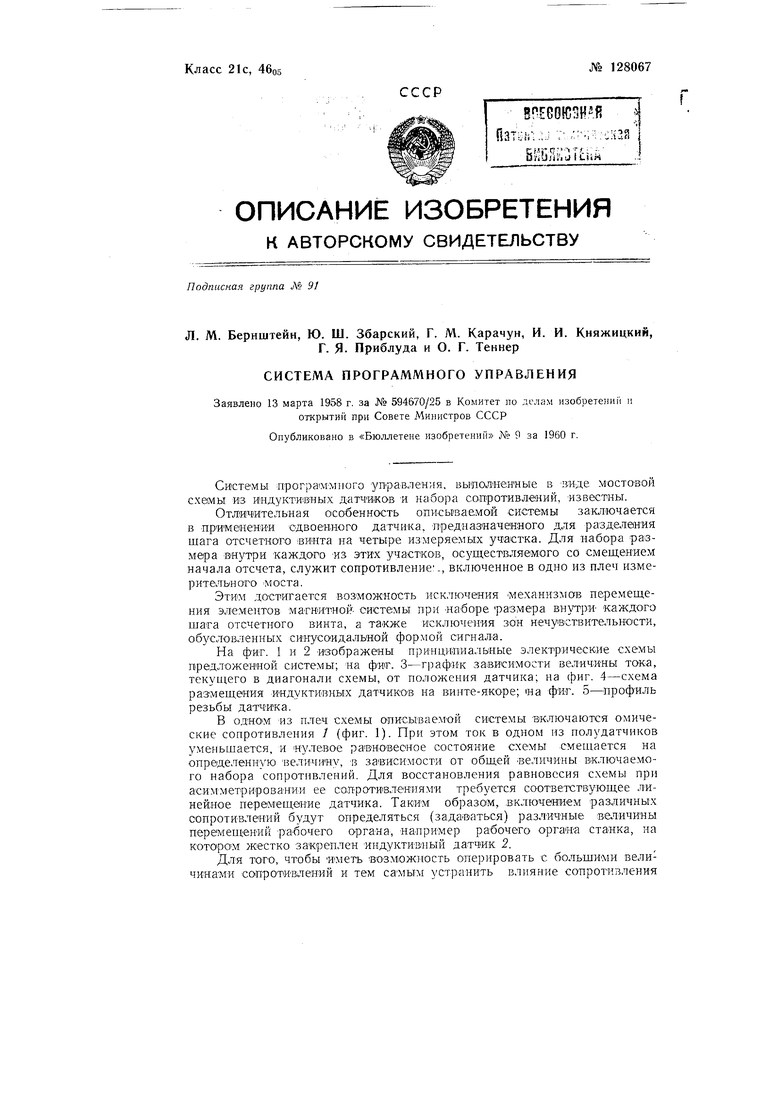
| название | год | авторы | номер документа |
|---|---|---|---|
| Система индуктивных зубчатых датчиков | 1960 |
|
SU148446A1 |
| Способ прецизионной остановки исполнительных органов станков | 1960 |
|
SU141365A1 |
| Способ уменьшения неточности обработки, возникающей в результате тепловых деформаций прецизионных станков | 1957 |
|
SU118067A1 |
| Индуктивный датчик | 1951 |
|
SU95261A2 |
| Индуктивный датчик | 1951 |
|
SU93343A2 |
| Преобразователь неэлектрической величины в электрический сигнал | 1981 |
|
SU1074206A1 |
| Устройство для непрерывного измерения уровня расплава | 1960 |
|
SU131916A1 |
| Вентильный электродвигатель | 1976 |
|
SU649105A1 |
| Устройство для измерения температуры и влажности воздуха | 1988 |
|
SU1604247A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1998 |
|
RU2136103C1 |
Фиг. 2
- Фиг.-ЗПроклад/fa толщиной f, 25 шага
