Известны системы индуктивных зубчатых датчиков для деления окружности на любое целое число, работающих в контуре программного управления.
Описываемая система индуктивных зубчатых датчиков отличается от известных тем, что она включает в себя два, три или больше каскадов датчиков, жестко закрепленных на одной оси. Ротор и статор первого каскада имеют винтовую нарезку с , а роторы и статоры последующих каскадов снабжены зубчатыми венцами с числом зубьев , 7..ri и т. д. Такая система индуктивных датчиков является многоотсчетной и повышает точность деления.
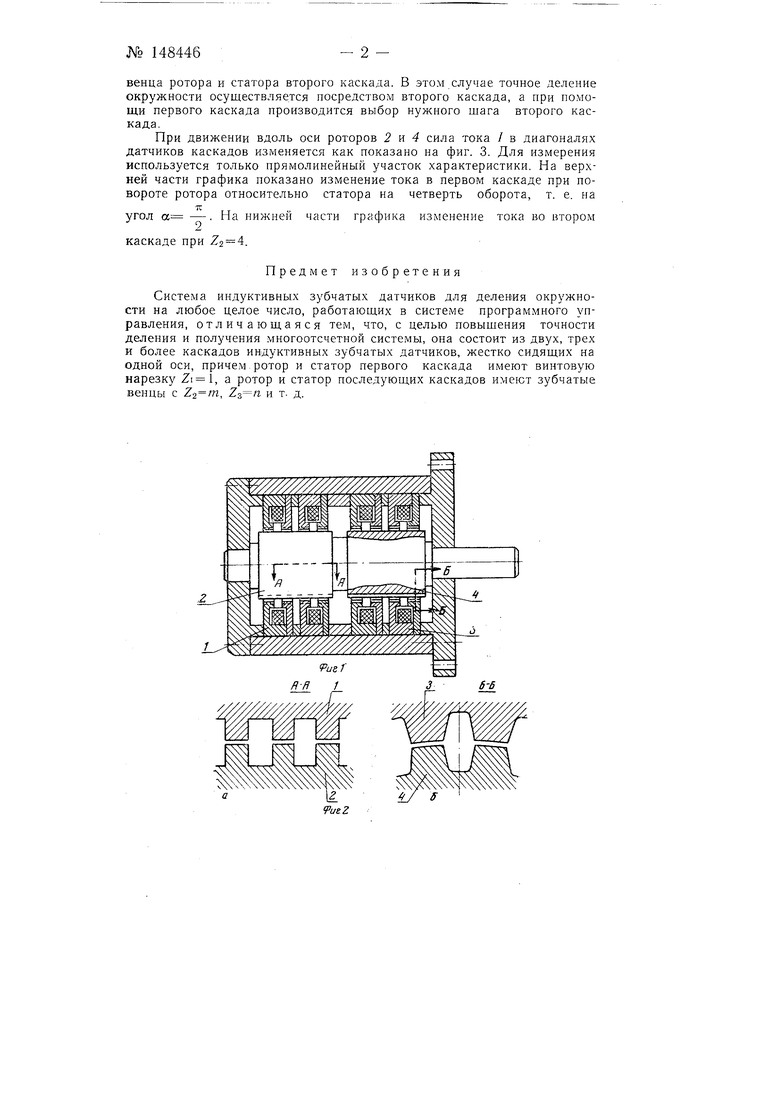
На фиг. 1 показана система двух датчиков в разрезе; на фиг. 2 - профили резьбового а и зубчатого б датчиков (разрезы по А-А и Б-Б на фиг. 1); на фиг. 3 - кривые тока в диагоналях двухкаскадной системы датчиков.
Индуктивные зубчатые датчики включаются в систему программного управления, выполненную в виде мостовой схемы из индуктивных датчиков и набора сопротивленнй, известную из авт. св. Л 128067.
Статор / первого каскада представляет собой неподвижную индуктивную гайку, а ротор 2 - винт.
Статор и ротор первого каскада имеют винтовую нарезку . Второй каскад имеет аналогичную конструкцию, а статор 3 и ротор4 вместо винтовой нарезки и.меют: первый - внутренний зубчатый венец, а второй - внешний зубчатый венец с числом зубьев 2 т. Третий и последующий каскады отличаются от второго каскада числом зубьев зубчатого венца и т. д.
Ири помощи первого каскада, включенного в систему программного управления, можно осуществить деление окружности па любое число частей. При включении в систему двух каскадов точность деления окружности повыщается пропорционально количеству зубьев зубчатого
венца ротора и статора второго каскалта. В этом случае точное деление окружности осуществляется посредством второго каскада, а при номощи первого каскада производится выбор нужного шага второго каскада.
При движении вдоль оси роторов 2 и 4 сила тока / в диагоналях датчиков каскадов изменяется как показано на фиг. 3. Для измерения используется только прямолинейный участок характеристики. На верхней части графика показано изменение тока в первом каскаде при повороте ротора относительно статора на четверть оборота, т. е. на
угол а -:. На нижней части графика изменение тока во втором
каскаде при Z2 4.
Предмет изобретения
Система индуктивных зубчатых датчиков для деления окружности на любое целое число, работающих в системе программного управления, отличающаяся тем, что, с целью повыщения точности деления и получения многоотсчетной системы, она состоит из двух, трех и более каскадов индуктивных зубчатых датчиков, жестко сидящих на одной оси, причем,ротор и статор первого каскада имеют винтовую нарезку , а ротор и статор последующих каскадов имеют зубчатые венцы с Z2 m, и т. д.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система программного управления | 1958 |
|
SU128067A1 |
| Способ уменьшения неточности обработки, возникающей в результате тепловых деформаций прецизионных станков | 1957 |
|
SU118067A1 |
| ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ ВАЛА | 2000 |
|
RU2180096C2 |
| МОТОР-РЕДУКТОР С ИНТЕГРИРОВАННЫМ ПРЕЦЕССИРУЮЩИМ ЗУБЧАТЫМ КОЛЕСОМ (ВАРИАНТЫ) | 2013 |
|
RU2538478C1 |
| СТАРТЕР-ГЕНЕРАТОР КОЛЕНЧАТОГО ВАЛА | 2015 |
|
RU2700808C2 |
| Индуктивный датчик для деления окружности на n и 2 n равных частей | 1954 |
|
SU116538A1 |
| ТОРЦЕВОЙ ВОЛНОВОЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2010 |
|
RU2418351C1 |
| Приводное устройство план-шайбы поворотно-делительного стола | 1976 |
|
SU663544A1 |
| ПЛАВУЧАЯ ПРИБРЕЖНАЯ ГИДРОВОЛНОВАЯ ЭЛЕКТРОСТАНЦИЯ | 2014 |
|
RU2626188C2 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ ВИНТОВОГО ЗАБОЙНОГО ДВИГАТЕЛЯ | 2007 |
|
RU2360129C2 |

Put3
