В отличие от известных способов измерения шага звеньев собранных втулочно-роликовых цепей предлагается производить четыре измерения шага звена, из которых вторые два измерения следуют после поворота роликов на половину оборота по сравнению с их положением при первых двух измерениях.
Такое осуществление предлагаемого способа обеспечивает определение среднего значения действительного шага звена, являющегося переменней величиной, зависящей от направления движения цепи, а также расстояния между осями втулок.
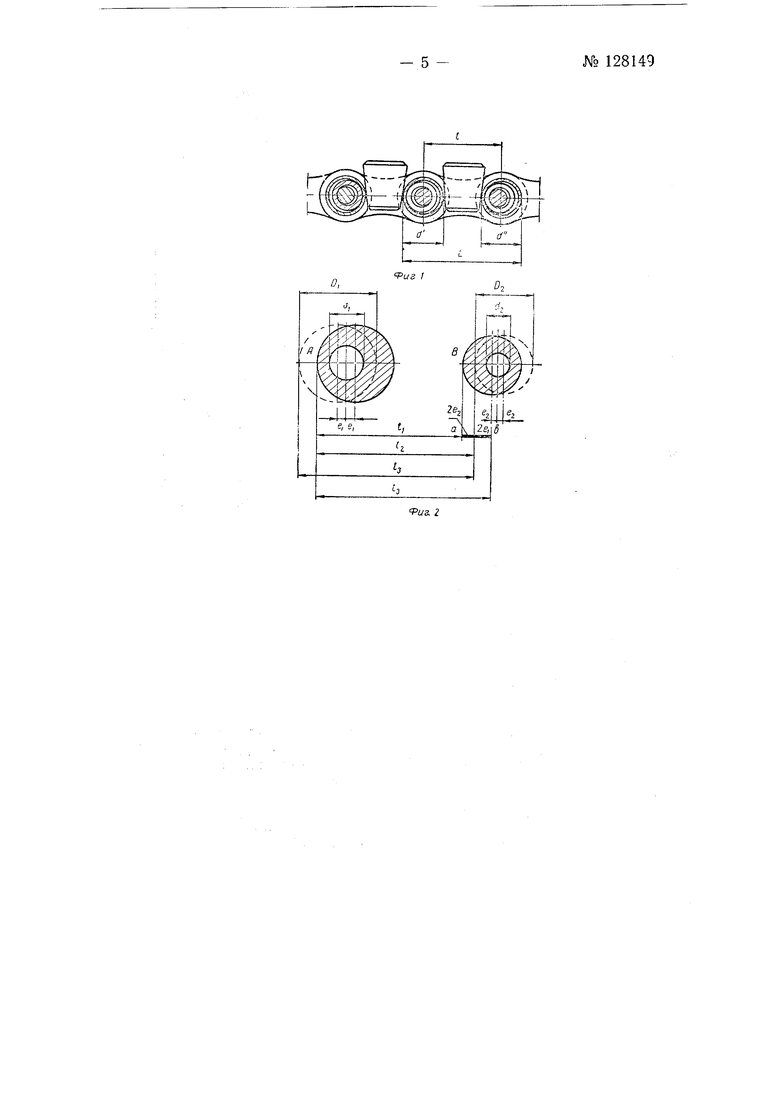
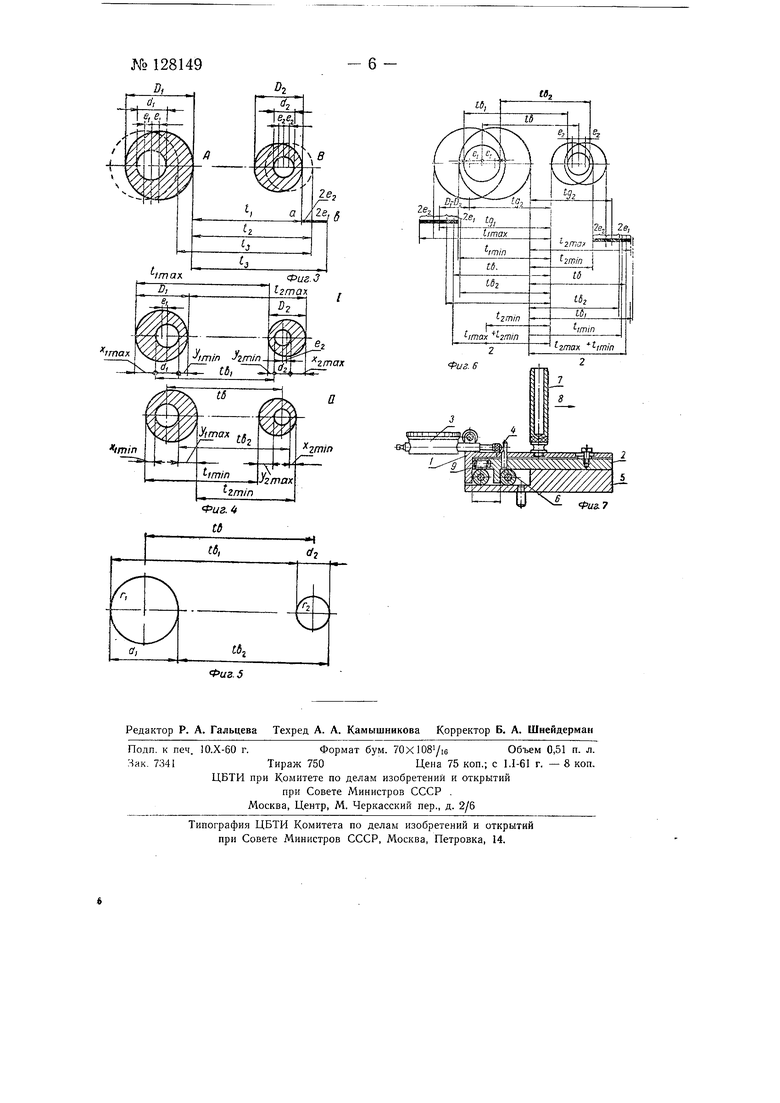
На фиг. 1, 2, 3, 4, 5 и 6 изображены схемы, поясняющие предлагаемый способ; на фиг. 7 дан в разрезе прибор для осуществления способа.
Основным размером втулочно-роликовой цепи является ее шаг. Качество цепи в основномзависит от однородности длины ее звеньев. При отклонении действительного шага звеньев от номинального нарушается плавное зацепление и возникают динамические усилия, которые значительно ускоряют износ цепного привода.
Вследствие невозможности непосредственно измерить действительный шаг, определение .его представляет известные трудности. Обычно при определении действительного ш;ага втуло.чно-роликовой цепи пользуются формулой (фиг. 1)
t I - - - -При составлении этой формулы допускалось, что действительным шагом следует считать расстояние между осями роликов, поскольку в зацепление с зубьями звездочки входят звенья цепи непосредственно роликами. Но в действительности ролики входят в зацепление со звездочкой своими боковыми поверхностями. Поэтому плавное зацепление
№ 128149- 2 обеспечивается только тогда, когда расстояния между ними будут равными. В то же время расстояния между осями роликов могут быть и различными.
Если расположить ролики так, чтобы расстояния между их осями
г d+
были одинаковыми и равными L, то расстояния между их боковыми поверхностями окажутся различными и плавность зацепления нарушается. Кроме того, при наличии разностенности роликов, ввиду того, что они в процессе измерения шага, поворачиваясь на втулках, могут занимать различные положения, длина L будет переменной величиной для одного и того же звена.,
Для определения действительных шагов звена втулочно-роликовой цепи и расстояния между осями втулок располол им ролики звена цепи в исходное положение (фиг. 2).
Пусть DI , а зазоры хмежду роликами и втулками отсутствуют, тогда расстояния между крайними левыми точками роликов, обозначенных буквами Л и В, будет равно t. Оставляя первый ролик неподвижным, поворачивают второй ролик на половину оборота; расстояние между точками А и В изменяется и становится равным tz- Подобным образом поступают со вторым роликом (т. е. оставляют его неподвижным и поворачивают первый ролик). Тогда расстояние между точками А н В становится равным /з- Разность /з-/ дает величину максимального поля колебания действительного шага звена при условии, если нижняя ветвь цепи является веду1цей и движется слева направо.
На фиг. 3 показаны соответственные величины при условии движения цепи в обратном направлении.
Величина поля колебания размера t не меняется, а длина отрезков /., и /3 уменьшается на определенную величину.
Это же звено цепи изображено на фиг. 4 с двумя различными положениями роликов.
Если х max У min У min ТО:
При первом положении роликов
1 тах max Уг.т1п (
2 тах tb2+ Х2 max У1 min
при втором положении роликов
1 min 1-У2 max (
2 min 2 У1 max + min ()
Из фиг. 4 видно, что: х, max ; г
У| min nun У min Решая совместно уравнения (1), (4) и (2), (3), получаем:
l max 2 min ° + i max Уз min + з Уг max - min 1
tb + tb ti ax + min(5)
2 max 1 min 2 + max У min max min
tb + tb tz max + 1 min (6)
Из фиг. 5 ВИДНО, что
+ n-rz;
tb2 tb + Г2-ri;
откуда
tbi + tb2 2tb; или tb ll,(7)
где tb - расстояние между осями втулок.
Используя уравнение (7), уравнения (5) и (6) можно представит-., в следующем виде:
... min ./gl
fh lax- lmin(9
На фиг. б изображена схема рассматриваемых параметров звена, из которой следует, что независимо от того, в каком направлении движется цепь, величина поля колебания размера шага цепи будет одинакова.
Наблюдениями установлено, что ролики изнашиваются равномерно, не теряя при этом формы цилиндра. Поэтому есть основания предполагать, что они во время движения цепи периодически, при набегании и сбегании со звездочек, поворачиваются в одном направлении на некоторый, примерно одинаковый, угол. Действительный шаг при этом будет периодически изменяться в пределах поля от ,,;,,IW f ,„ад-, причем
ff- la а )
max 1 mm - 2
Совершенно очевидно, что наибольшее число раз звено будет вступать в зацепление со звездочкой с шагом, длина которого равна среднему его значению. Из схемы видно, что средний действительный шаг соЛ Ш fl Y 1 ТП
ставляет ., когда цепь движется при нижней ведуш;еи ветви - слева направо и тт когда движение цепи - противоположное.
Формулы для определения ib, tgi и были выведены при первом и втором положениях роликов, когда лгь г/i, Х2 и у, а также i и имели максимальные и минимальные значения.
Выведенные формулы справедливы, если ролики находятся в произвольном положении.
Из уравнений (1) и (4) следует, что если повернуть первый ролик на некоторый угол, то Ximax уравнении (1) - первое положение - уменьшится на некоторую величину; на такую же величину уменьшится з| тах уравнении (4) - второе положение. При повороте второго ролика изменение будет равно изменению х ,„,-„. При этом ti „; и .,,„;„
приобретут другие значения соответственно ti и . Учитывая знаки переменных в уравнениях (1) и (4), можно определить, что
i- f - / j- / ч -max -ч т in - i-z
Следовательно, t - П - (Ю)
Аналогично рассуждая, можно показать, что
f -+ / 1 , ч
I mmta fhП
(11)
... такжеimax+ilmm i + i ,.-. о-.(19)
/-, f..; 1 . . и
zmax i-z nun f г + ; .: tg.j(13)
- 3 № 128149
j
№ 128149- 4 -.
Из этого следует то важное обстоятельство, что при определении tb, tgi и tgz путем измерений ролики могут быть повернуты в.произвольное положение.
Для осуществления предлагаемого способа молсет б.ыть применен известный индикаторный прибор (фиг. 7), имеющий две губки 1 к 2, из которых одна воздействует на наконечник индикатора 3 через штифт 4 Перед измерением цепи прибор устанавливают по эталону 5, представляющему собой оправку с двумя роликами 6. После нажатия - на рукоятку 7 в направлении стрелки 8 совмещают нулевое деление щкалы индикатора 3 с положением его стрелки. В это время губка / своей мерительной поверхностью прижата усилием руки к первому ролику 6, а губка 2 под действием пружины 9 - ко второму ролику 6. Расстояние между мерительными поверхностями губок в этот момент равно строго номинальному размеру щага цепи г,у.
Затем переносят прибор на измеряемую цепь, и каждое измерение показывает отклонение от номинального размера щага.
При измерении нескольких звеньев или всей цепи отмечают положение роликов и измеряюг подряд все звенья цепи в направлении слева направо. Затем производят второе измерение справа налево. После этого поворачивают все ролики на половину оборота (ориентируясь мегками) и в том же порядке производят третье и четвертое измерения.
Предмет изобретения
1.Способ измерения щага звеньев собранных втулочно-роликовых цепей, отличающийся тем, что, с Целью определения среднего значения действительного щага звена, являющегося переменной величиной, зависящей от направления движения цепи, а -также расстояния между осями втулок, производят четыре измерения щага звена, из которых вгорые два измерения следуют после поворота роликов на половину оборота по сравнению с их положением при первых двух измерениях.
2.Применение для осуществления способа по п. 1 индикаторного прибора с двумя губками, приводимыми в процессе измерения в контакт с образующими роликов звена цепи.
Г/
,А
гтах
-Н
(6,
(f2
Pus.7

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ДЕЙСТВИТЕЛЬНЫХ ШАГОВ РОЛИКОВЫХ ЦЕПЕЙ | 2014 |
|
RU2563771C1 |
| Механизм замедления движения втулочно-роликовой цепи на технологической позиции конвейера | 1978 |
|
SU745804A1 |
| Измерительная звездочка | 1978 |
|
SU737688A2 |
| Втулочно-роликовая цепь | 1980 |
|
SU994831A1 |
| Прибор для определения удлинения и длины втулочно-роликовых цепей | 1977 |
|
SU905608A2 |
| УСТРОЙСТВО ДЛЯ ОСАДКИ ПЛАСТИН | 1965 |
|
SU170271A1 |
| Устройство для восстановления шага втулочных и роликовых цепей | 1978 |
|
SU764824A1 |
| Способ регулирования режима лучистого и контактного обогрева сельскохозяйственных животных и устройство для его осуществления | 1991 |
|
SU1821110A1 |
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ УДЛИНЕНИЯ И ДЛИНЫ ВТУЛОЧНО-РОЛИКОВЫХ ЦЕПЕЙ•• fT.vi^iriTHi -••п:.^:;:чгг;дл о;:оА;;3|^:-А | 1965 |
|
SU173960A1 |
| Устройство для измерения шага втулочно-роликовых цепей | 1979 |
|
SU1052838A1 |
td.
(;
