- I . - Изобретение относится к прсмышйенйом транспорту, в частности к м;--ханизмак з медления движения втулочно-роликовой тя- говой цепи на технологической позиции конвейера. Известен механизм замедления движения втулочно-роликовой тяговой цепи ко№вейера, включающий профилированные направляющие, взаимодействующие со звеньями тяговой цепи для юс складывания 1 . Одаако, такой механизм обладает недостатком, который ограничивает применен1ае его в роторно- -конвейерных машинах. В это механизме шаг между гнездами на сложен ном участке цепи получается произволв ным, так как звенья цепи занимают различное положение между направляющими. Ввиду этого затруднены такие операции, как загрузка издели51ми или порошком гнезд конвейера. Особенно этот недостаток существенен Для роторно-конвейерных машин, имеющих горизонтальное расположение цепного конвейера. Кроме того, при этом механизме усложнен процесс измене:.;--: , 2 нйя шага между звеньями тяговой цепи, что необходимо при изменении шага гнезд конвейера. Известен также механшм замедления движения втулочно-роликоЕюй тяговой цепи на технологической позиции конвейера, включающий приводные звездочки, линейная скорость которых меньше скорости переме-; щения тяговой цепи, и смонтированные с двух сторон от приводных звездочек направлгяющие С2. Этот механизм имеет те же недостатки, чтЬ и описанньгй выше механизм, а именно, недостаточная точность расположения звеньев тяговой цепи на участке замедления и сложность процесса изменения шага между звеньями тяговой цепи. Целью изобретения является увеличение точности расположения звеньев тяговой це- пи на участке замедления ее движения и . упрощения процесса изменения шага между звеньями тяговой цепи. Поставленная цель достигается тем, что механизм снабжен дополнительными
745804
звездочками, смонтированными за тфиводнйми звездочками по ходу перемещения тяговой цепи и замюгутьши втулочн(-роликоБыми цепями, огибающ11ми приводные и дсэтолнителЫные звездочки, и 5 танош1енными с возмодшЬстью взаи 1одействия с роликами тяговой цепи,
KjpoMe того, на внутретшй стороне веч
вей замкнутых цепей, контактирующих со звеньями тяговой цепи, устамовлены регулИруёмыё прижимные клапаны, а каждое звено замкнутых цепей вьт:олненр,с вы емкой на наружной стороне.
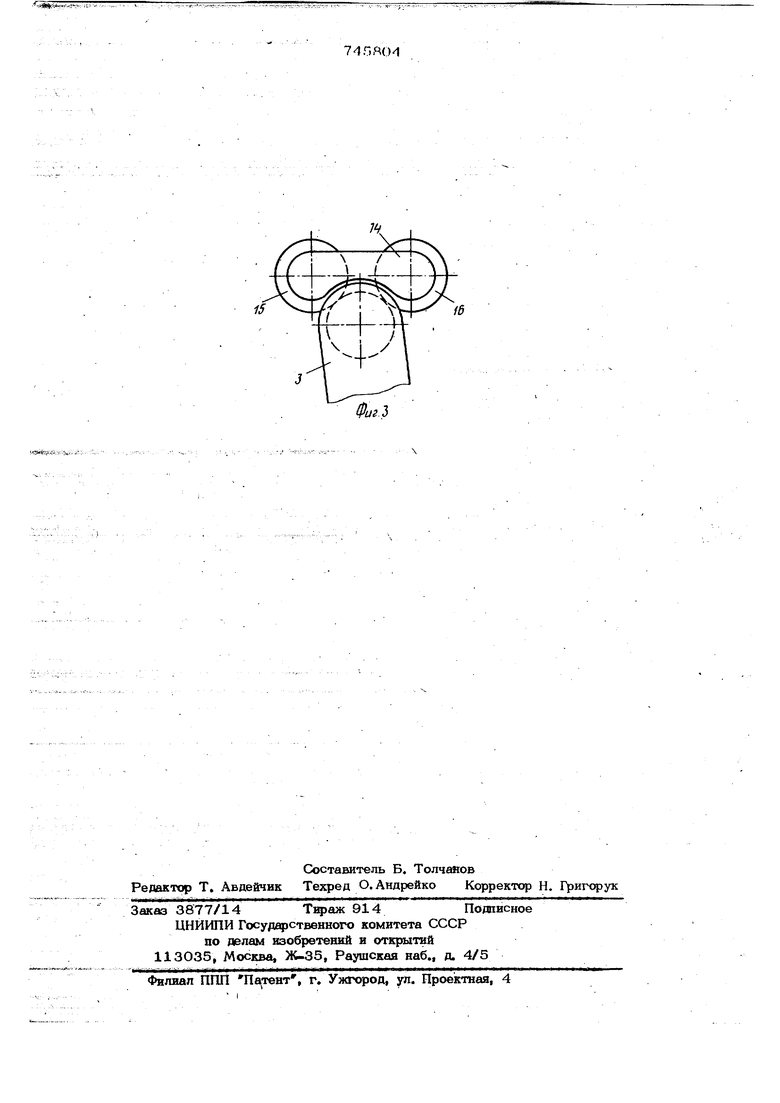
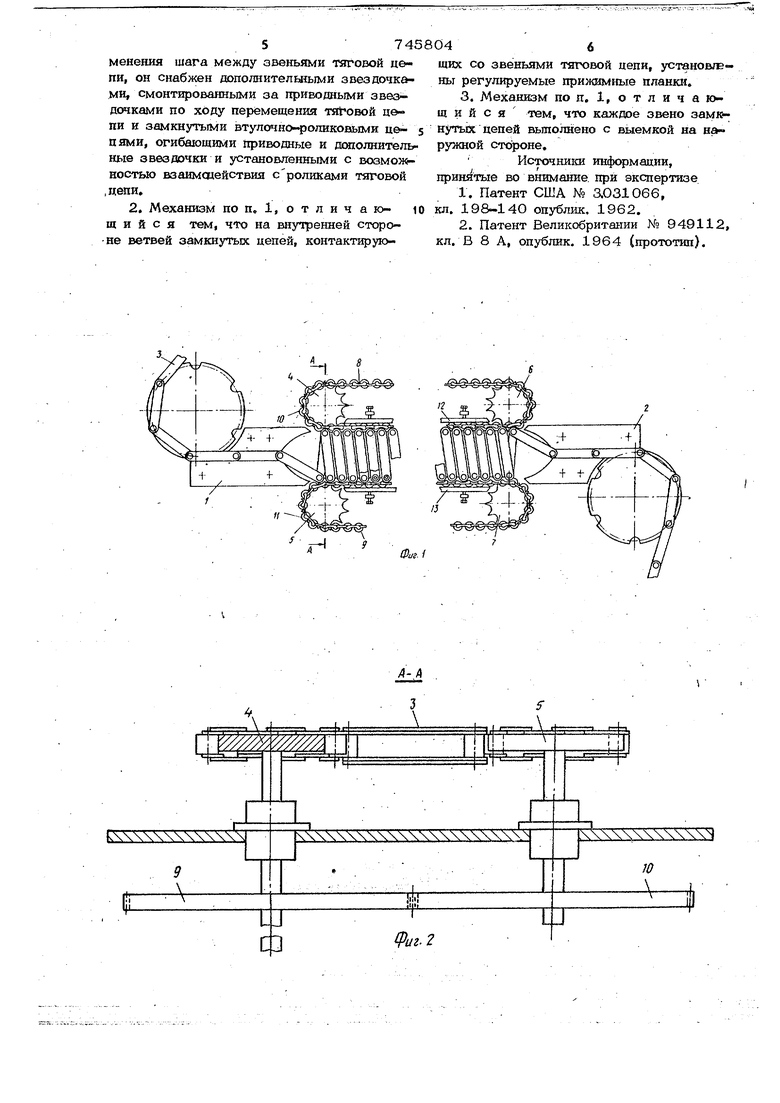
На фиг. I -общий вид механизма в плане; на фиг, 2 - разрез А-А фиг, 1; на фиг. 3 - увеличенный фрагмент занепления ррликов замкнутой цепи с роликом тяговой цепи конвейера.
На раме конвейера (не показано) устан.овлены первые 1 и вторые 2 по ходу движения Т говой вту-лочно-ррликовой цепи 3 направляющие, имеющие профилированныл участок. После первых направляющих на раме смонтированы, приводные звездочки 4 и 5, а перед вторыми направляюjuHMH 2 допрл1штельные звездочки б и 7, На звездочки 4 и 6 и 5 и 7 одеты замкнутые втулочно-ролнковы.е цепи 8 и 9 взаимодейтсв5тощие своими роликами с роликами тяговой цепи 3, j
Звездочки .4 и 5 (фиг, 2) вьшолнены кРнструктивно одинаковыми, расположены в опорах щ)ащения на раме и снабжены, синхронным приводом в виде зубчатых колес 10 и 11, сцепленных с приводом. Привод зубчатых колес 10 и 11 ббеспечивает перемещение цепей 8 и 9 9 --..-- ii:;b -:r S -i -r- ;.rfe4 pii.--U,-- -rr:.. .-vi г- .--V------ i----i- --- - - ..:.- Ял---±й-.:й;-,-,. но меньшей скоростью, чем скорость пер мещения тягрвой цепи 3, Замкнутые втулочно роликовые цепи 8 и 9 снабжены регулируемыми прижимными планками 12 и 13, которые .прижимают их ветви к соответствующим рядам роликов сложенного участка тяговой цепи 3 конвейера,. Каждое звено 14 цепей 8 и 9 вьто№Нено с выемкой с наружной стороны (фиг, 1 и 3), При этом диаметр роликов 15 и 16 цепей 8 и 9 вьтолнены большим, чем ширина звеньев этих цепей. Такое олнёние замкнутых цепей п озволяет осуществить вписывание звена тяговой цепи конвейера между роликами 15 и 16 це-. пей 7 и 8 при пепосредственном взаимодействии ролика тяговой цепи конвейера . с ними. При работе конвейера звездочки 4, 5, 6 и 7 находятся в непрерывном синхронном вращении. Звенья тяговой цепи 3 при выходе из направляющей 1 складываются в агарнире и их ролики перемещаются по одному из профильных участков направляк шей 1 до взаимодействия с роликами 15 или 16 цепей 8 или 9, при этом верхняя пластина цепи ложится на ролнк 15, За счет профиля направляющей 1 ролик звена тяговой цепи 3 конвейера помещается точно между двумя роликами цепей 8 или 9, При достижении роликом тяговой цепи 3 роликов одной из замкнутых цепей, следующий ролик тяговой цепи 3 скользит по противоположному профильному участку направляющей 1, При этом его линейная скорость nepeMemeiara плавно уменыиается от транспортной скорости конвейера до заданной скорости его перемещегжя на сложенном участке конвейера.
На сложенном участке конвейера роликзи тяговой цепи 3 перемещаются вдоль направления транспортирования, зажатые (зафшосированные) между роликами цепей 8 к 9. Такре взаимодействие конвейера с замкну тыми втулочно-роликовыми цепями 8 и 9 обеспечивают точный щаг между двумя соседними роликами тяговой цепи 3 крнвейера, что позволяет выполнять такие технолО гические операций как загрузка или. вы-грузка изделий в гнезда конвейера.
После прохождения звеньями тяговой цепи 3 конвейера участка замедления его ролики выходят из зацепления с роликами цепей 8 и 9, при этом ролики тяговой ц&пи 3 скользят по профиль1шгм участкам направляющей 2, ia затем выходят из нее. Д9 9льзование рписанного механизма прзволит обеспечить точность щага сложенного участка цепи, а также позволит за счет изменения шага цепей складывания и размеров их роликов менять в завис мости от конструктивных требований шаг конвейера на его сложенном участке. Ф Р р м у л а изобретения 1, Механизм-замедления движения вту лочно-ролшсрвой тяговой цепи на технологинеской позиции конвейера, включающий приводные звездочки, линейная скорость которых меньше скорости перемещения тяговой цепи и смонтированные с двух сторон от приводных звездочек направляющие, о Т л и ч а ю щ и и с я, тем, что, с целыо увеличения точности расположения звеньев тяговой цепи на участке замедпе- шга ее движения и упрощения процесса изменения шага между звеньями тяговой цепи, он снабжен дополнительными звездочками, смоктирова1шыми за приводными звез дочками по ходу перемещения тяговой цепи и замкнутыми втулочно-роликовыми це- s пями, огибающими приводные и дшолнительные звездочки и установленными с возможностью взаимодействия сроликами тяговой ,депи,
2. Механизм по п. 1, отличаю- ю щ и и с я тем, что на внутренней стороне ветвей замкнутых цепей, контактирующих со звень5ши тяговой цепи, установшны регулируемые прижимные планки.
3. Механизм поп. 1,отлича ющ и и с я тем, что каждое звено замкнутых цепей выполнено с выемкой на на ружной стороне.
ИСТОЧНИКЕ информации, принятые во внимание, при экспертизе
1.Патент США № аОЗЮбб, кл. 198-14О опублик, 1962.
2.Патент Великобритании № 949112, кл. В 8 А, опублик. 1964 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения штучных изделий | 1985 |
|
SU1328262A1 |
| Цепная передача | 1990 |
|
SU1776901A1 |
| Цепной конвейер | 1988 |
|
SU1525088A1 |
| Устройство для шплинтования прутков элеваторного полотна | 1977 |
|
SU680848A1 |
| ВЕРТИКАЛЬНО-ЗАМКНУТЫЙ ТЕЛЁЖЕЧНЫЙ КОНВЕЙЕР | 1973 |
|
SU382560A1 |
| Роликовый конвейер | 1988 |
|
SU1574511A1 |
| Грузозахватное устройство | 1991 |
|
SU1794848A1 |
| КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2003 |
|
RU2258656C2 |
| Конвейер | 1983 |
|
SU1134486A1 |
| Механизм подачи горной машины | 1983 |
|
SU1094961A1 |