Изобретение относится к области гидропневмоавтоматики и может быть использовано в электрогидравлических приводах станков и промышленных роботов.
Целью изобретения является повышение КПД, точности и надежности.
На фиг. 1 изображен электрогидравлический усилитель; на фиг. 2 - разрез А-А на фиг. 1.
Электрогидравлический усилитель содержит корпус 1 с каналом 2 питания и кана- лом 3 слива, исполнительный гидродвигатель 4, управляющее устройство в виде кинематически связанных с электромеханическими преобразователями 5 и 6 двухпози- ционных распределителей 7 и 8, плоский поворотный золотник 9, подключенный к полостям 10 и 1 1 гидродвигателя 4 каналами 12 и 13, и сравнивающее устройство в виде волновой муфты и волновой передачи с жесткими колесами 14 и 15, и обш,им гибким колесом 16 и приводными поршнями 17, раз- мещенными радиально внутри гибкого колеса 16 с образованием камер 18 управления по периферийной поверхности, 1лоского золотника 9.
Жесткое колесо 14 соединено с золотником 9, а колесо 15 кинематически связано зубчатой реечной передачей 19 с выходным элементом 20 гидродвигателя 4.
Распределители 7 и 8 соединены выходными гидролиниями 21, 22 и 23, 24 и соединительными каналами 25 с камерами управления диаметрально противоположно расположенных пар поршней, причем камеры управления взаимно перпендикулярно расположенных пар поршней соединены с разными выходными гидролиниями соответствующего распределителя. Плоп1,ади попереч- ного сечения камер управления выполнены большими площадей поперечного сечения каналов 25.
Электрогидравлический усилитель работает следующим образом.
При подаче электрических сигналов на электромеханические преобразователи 5 и 6 в виде последовательности импульсов (например, двухполярных, т. е. сдвинутых друг относительно друга на половину периода) двухпозиционные распределители коммути- руют камеры управления в заданной последовательности. В результате образуются две бегущие волны деформации гибкого колеса 16. Так как в начальный момент золотник 9 находится в нейтральном положении, гидродвигатель 4 неподвижен вместе С жестким колесом 15. Жесткое колесо 14 приводит
золотник 9 в движение, формируется перепад давления в каналах 12 и 13 и полостях 10 и 11, и выходной элемент 20 перемещается. При этом передача 19 вращает жесткое колесо 15, и гибкое колесо 16 при движении волны деформации перестает 1юворачивать- ся. Величина допустимого рассогласования определяется соотношение.м площадей поперечных сечений камер управ., и соединительных каналов, flocjie возвращения золотника 9 в нейтральное положение движение гидродвигателя 4 прекращается.
0
5
0
0
Формула изобретения
1.Электрогидравлический усилитель, содержащий корпус с каналами питания и слива, исполнительнЕлй г идродвнг атель, управляющее устройство с электромеханическими преобразователями, поворотный плоский золотник, подключенный к полостя.ад исполнительного гидродвигате.:гя, выходной 3;ie- мент которого кинематически связан с механическим сравнивающим устройством, соединенным с управляющим устройством и плоским золотником, отличающийся тем, что, с целью повышения КПД, точности и надежности, сравнивающее устройство выполнено в виде волновой муфты с двумя жестки,ми колесами, гибки.м колесом и приводными поршнями, раз.ещеппыми радиально внутри гибкого колеса с образованием по периферийной поверхности плоского золотника камер управления, подключенных соединительными каналами, выполненными в корпусе, к управляющему устройству, при этом одно из жестких колес соединено с плоским золотником, а другое кинематически связано с выходным элементом гидродвигателя, причем площадь поперечного сечения камеры управ.ления выбирается из условия , где /- у - п.; ОП1адь камеры управления, FK - площадь сечения соединительного канала.
2.Усилитель по п. 1, отличающийся те.м, что управляющее устройство выполнено в виде двух, кинематически связанных с электромеханическими преобразовате.чями, двухпозиционных распределителей, каждый из которых соединен выходными гидролиниями с камерами управления диаметрально противоположно расположенных пар nopiu- пей, причем камеры у11)авления вза.чмио перпендикулярно расположенных пар nopui- ней, соединены с разными выходны.ми | ид- ролипиями соответствующ,его распределн- тел я.
Сриг.2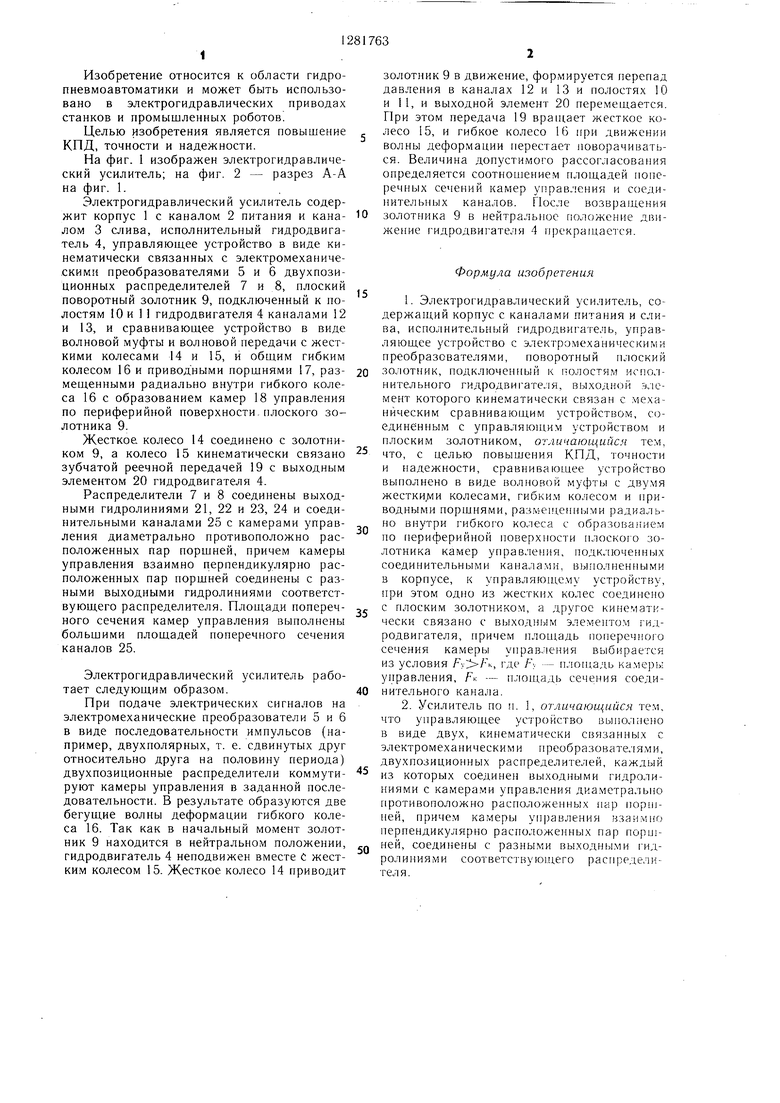
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧЕТЫРЕХЛИНЕЙНЫЙ ТРЕХПОЗИЦИОННЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С РЕЗЕРВИРОВАННЫМ ЭЛЕКТРОУПРАВЛЕНИЕМ ПРИВОДА ПОВОРОТА КОЛЕС ПЕРЕДНЕЙ ОПОРЫ ШАССИ ТРАНСПОРТНОГО СРЕДСТВА С ГИДРОДЕМПФЕРОМ | 2007 |
|
RU2342283C1 |
| ОГРАНИЧИТЕЛЬ МОЩНОСТИ ЭЛЕКТРОГИДРАВЛИЧЕСКОГО СЛЕДЯЩЕГО ПРИВОДА | 2006 |
|
RU2309302C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2006 |
|
RU2311567C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД | 2013 |
|
RU2513055C1 |
| Электрогидравлическая следящая система | 1989 |
|
SU1679075A1 |
| ГИДРОУСИЛИТЕЛЬ | 2006 |
|
RU2307960C1 |
| Цифровой электрогидравлический привод | 1978 |
|
SU792002A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2004 |
|
RU2268400C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ АГРЕГАТ, СЛЕДЯЩИЙ ДВУХКАСКАДНЫЙ ГИДРОУСИЛИТЕЛЬ И РЕГУЛИРУЕМЫЙ СИЛОВОЙ ДРОССЕЛЬ | 2002 |
|
RU2242641C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СИЛОВОЙ ПРИВОД | 1981 |
|
SU1032691A1 |
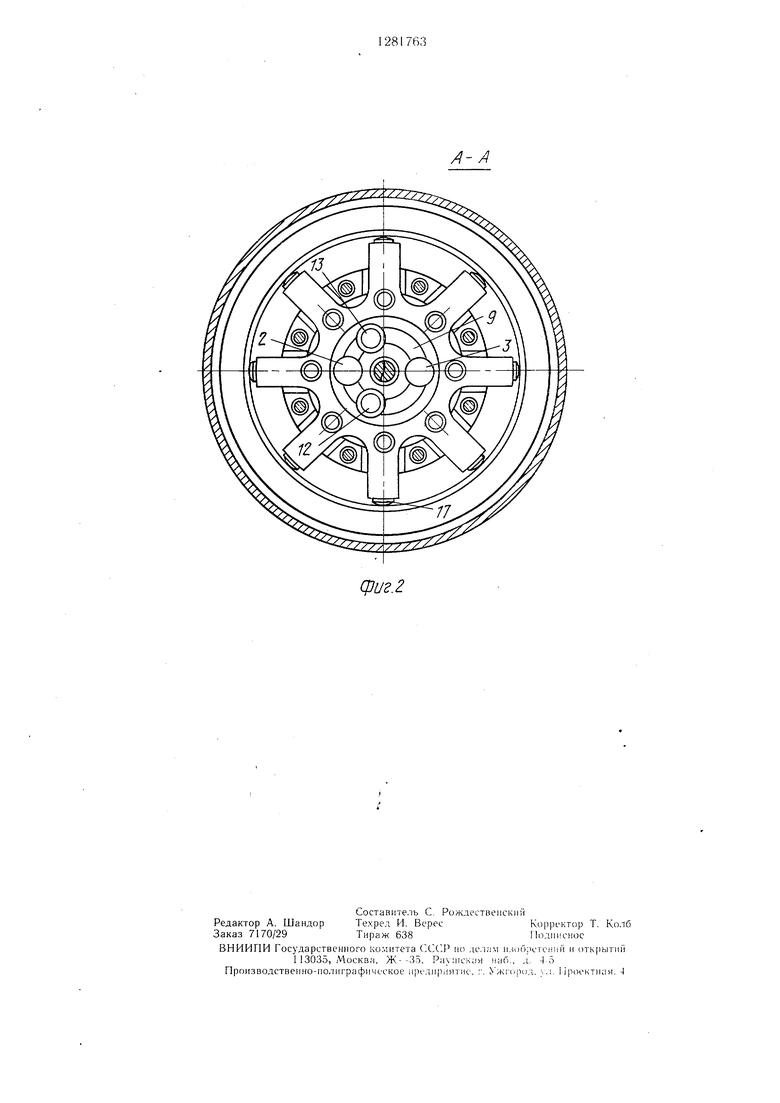
Изобретение относится к области гидропневмоавтоматики и может быть использовано в электрогидравлических приводах станков и промышленных роботов. Цель изобретения - повышение КПД, точности и надежности усилителя. Управляющее устройство состоит из двухпозиционных распределителей 7, 8, плоского поворотного золотника 9 и сравниваюшего устройства. Сравнивающее устройство выполнено в виде волновой муфты с жесткими колесами 14, 15 и гибким колесом 16. Приводные порщни 17 размещены радиально внутри гибкого колеса 16 и образуют камеру 18 управления на периферийной поверхности плоского зоk 23 лотника 9. Колесо 14 соединено с золотником 9, а колесо 15 кинематически связано с выходными элементами 20 гидравлического двигателя 4. Двухпозиционные распределители 7, 8 соединены гидролиниями 21, 22 и 23, 24 и соединительными каналами 25 с камерами 18 управления. Площадь поперечного сечения камеры управления выбирается из условия Fy к, где Fy - площадь камеры управления; FK - площадь сечения соединительного канала. Камеры 18 управления коммутируются последовательными импульсами. При этом образуются две бегущие волны деформации гибкого колеса 16. Колесо 14 приводит золотник 9 в движение, формируется перепад давления в полостях 10, 11 и выходной элемент 20 перемещается. Передача 19 вращает жесткое колесо 15, а гибкое колесо 16 при движении волны деформации перестает поворачиваться. Величина допускаемого рассогласования определяется соотнощением площадей поперечных сечений камер 18 управления и соединительных каналов 25. После возвращения золотника 9 в нейтральное положение движение гидродвигателя прекращается. 1 з. п. ф-лы, 2 ил. 75/5 О (Л ND СХ) 05 СО Фиг.
| Посохин Г | |||
| Н | |||
| Дискретное управление электрогидравлическим приводом | |||
| М.: Энергия, 1975, с | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
