Изобретение относится к области электрогидравлических силовых приводов, предназначенных для электродистанционных систем управления летательных аппаратов.
Известны приводы, содержащие силовой гидроцилиндр, распределительные устройства и электрогидравлическую рулевую машину, причем рулевая машина кинематически подсоединена по дифференциальной схеме к механическому входу распределительного устройства, а между выходом силового гидроцилиндра и распределительным устройством имеется кинематическая обратная связь. В таких приводах выходное звено рулевой машины и золотник распределительного устройства соединены с помощью системы тяг и качалок, наличие которых увеличивает габариты и вес конструкций, а люфты в кинематической цепи при больших расходах через распределитель ведут к ухудшению динамических характеристик и уменьшению жесткости приводов.
Наиболее близким к предлагаемому изобретению является электрогидравлический силовой привод, содержащий многоканальную управляющую рулевую машину с жестким соединением исполнительных поршней на общем выходном звене поступательного действия, связанном через систему тяг и качалок с двумя гидравлическими распределительными устройствами, выходы которых соединены с двухкамерным силовым цилиндром.
Недостатками этого привода являются большие габариты устройства кинематической связи между выходом многоканальной управляющей рулевой машины и распределительными устройствами, а также наличие люфтов, приводящих к ухудшению динамических характеристик.
Цель изобретения улучшение статических и динамических характеристик, снижение веса и уменьшение габаритов привода.
Указанная цель в приводе, содержащем многоканальную управляющую рулевую машину с жестким соединением исполнительных поршней на общем выходном звене поступательного действия, кинематически связанном с двумя гидравлическими распределительными устройствами, выходы которых гидравлически соединены с двухкамерным силовым гидроцилиндром, достигается тем, что гидравлические распределительные устройства установлены соосно с общим выходным звеном поступательного действия многоканальной рулевой машины и связаны с ним посредством гибких стержней.
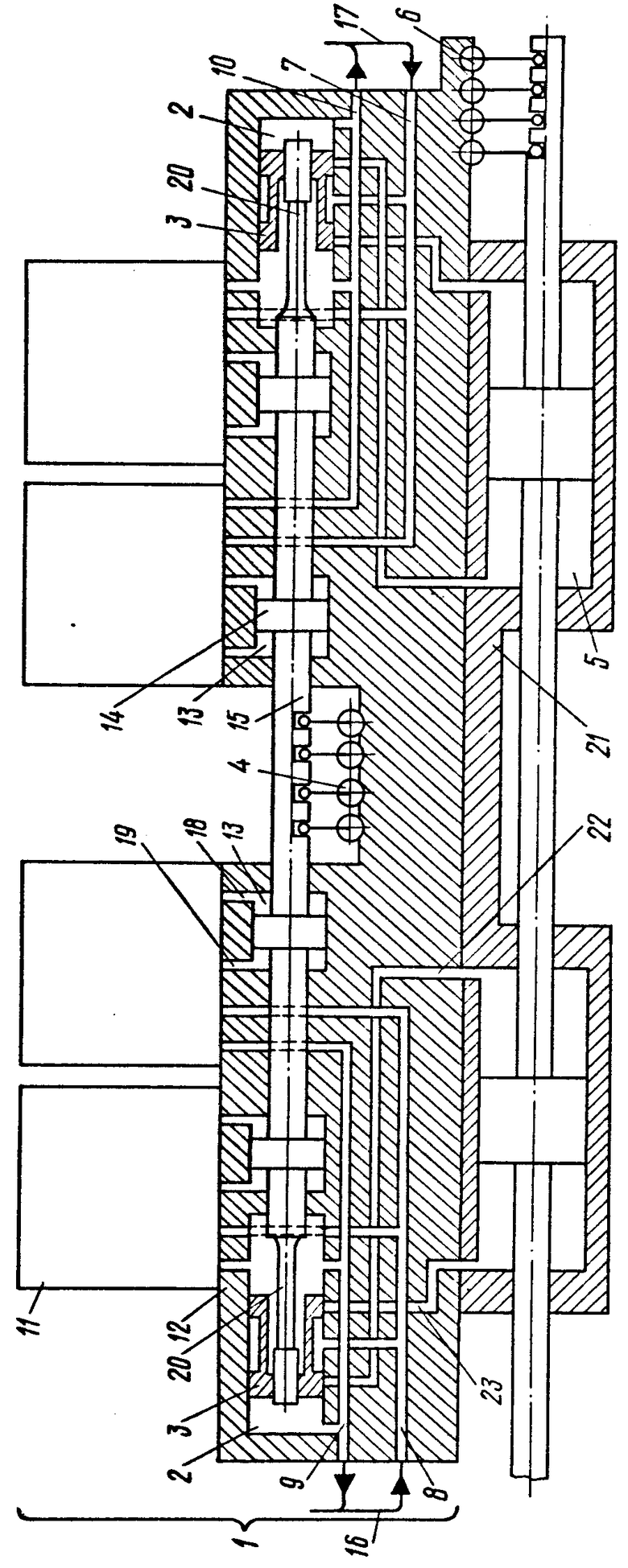
На чертеже изображена принципиальная схема электрогидравлического силового привода.
Привод содержит четырехканальную рулевую машину 1 с жестким соединением выходных звеньев каналов, распределительные гидравлические устройства 2 с золотниками 3, датчиком 4 обратной связи рулевой машины, двухкамерный силовой гидроцилиндр 5, датчики 6 обратной связи силового привода, гидролинии нагнетания 7 и 8 и слива 9 и 10. Управляющие блоки 11 рулевой машины 1 установлены на корпусе 12, в котором расположены гидродвигатели 13 поступательного действия каналов. Поршни 14 гидродвигателей 13 соединены общим штоком 15. Блоки 11 гидравлически соединены с линиями нагнетания и слива попарно от каждой из двух систем гидропитания 16 и 17, а через линии 18 и 19 с соответствующими полостями гидродвигателей.
Золотники 3 распределительных устройств 2 установлены соосно на одной оси со штоком 15 и расположены в корпусе 12, который является распределительной гильзой золотника 3 и цилиндром для гидродвигателя 13.
Компенсация несоосности золотника 3, соединенного безлюфтовой связью со штоком 15 обеспечивается с помощью гибких стержней 20. Синхронизация работы осуществляется с помощью резьбового соединения золотника 3 и гибкого стержня 20. Рулевая машина 1 установлена на корпусе 21 двухкамерного силового гидроцилиндра 5, а его полости соединены гидролиниями 22 и 23 с распределительными устройствами 2.
Работа привода происходит следующим образом.
При подаче сигналов управления в управляющие блоки 11 рулевой машины 1 перемещаются поршни 14 гидродвигателей каналов. При перемещении общего штока 15 перемещаются золотники 3 распределительных устройств 2, причем величина перемещения золотников равна величине перемещения штока, которая пропорциональна величине сигналов управления и коэффициенту обратной связи датчиков 4. При перемещении золотников 3 распределительных устройств 2 рабочая жидкость по линиям 22 и 23 подается к полостям силового двухкамерного гидроцилиндра 5. Поршень гидроцилиндра 5 перемещается на величину, определяемую сигналом управления и коэффициентом обратной связи датчиков 6. Отсутствие люфтов и дополнительных передаточных механизмов в соединении выходного штока рулевой машины с золотником распределительного устройства улучшает статические и динамические характеристики привода.
Расположение гидродвигателя и распределительных устройств в общем корпусе уменьшает габариты и массу привода.
Привод по данному изобретению в сравнении с известным приводом (прототипом) при одинаковом развиваемом усилии и ходе поршня силового гидроцилиндра имеет меньшую массу при значительном улучшении статических и динамических характеристик.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СИЛОВОЙ ПРИВОД | 1987 |
|
SU1432936A1 |
| Блок комбинированных рулевых приводов системы управления летательного аппарата | 1981 |
|
SU1839883A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2004 |
|
RU2262467C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ МНОГОКАНАЛЬНЫЙ РУЛЕВОЙ ПРИВОД | 2001 |
|
RU2211962C2 |
| КОМБИНИРОВАННЫЙ АГРЕГАТ УПРАВЛЕНИЯ | 2012 |
|
RU2532634C2 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ГИДРОМЕХАНИЧЕСКИЙ ПРИВОД ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2004 |
|
RU2266234C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД | 2001 |
|
RU2207300C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ | 2002 |
|
RU2233464C2 |
| РУЛЕВАЯ МАШИНА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1980 |
|
SU1840176A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СИЛОВОЙ ПРИВОД, содержащий многоканальную управляющую рулевую машину с жестким соединением исполнительных поршней на общем выходном звене поступательного действия, кинематически связанном с двумя гидравлическими распределительными устройствами, выходы которых гидравлически соединены с двухкамерным силовым гидроцилиндром, отличающийся тем, что, с целью улучшения статических и динамических характеристик, снижения веса и уменьшения габаритов привода, в нем гидравлические распределительные устройства установлены соосно с общим выходным звеном поступательного действия многоканальной рулевой машины и связаны с ним посредством гибких стержней.
| Патент США N 3540350, кл | |||
| Огнетушитель | 0 |
|
SU91A1 |
| Кинематографический аппарат | 1923 |
|
SU1970A1 |
