Изобретение относится к робототехнике и может быть использовано при создании универсальных манипуляторов.
Цель изобретения - упрощение устройства за счет исключения вычислительного блока и повышение его точности.
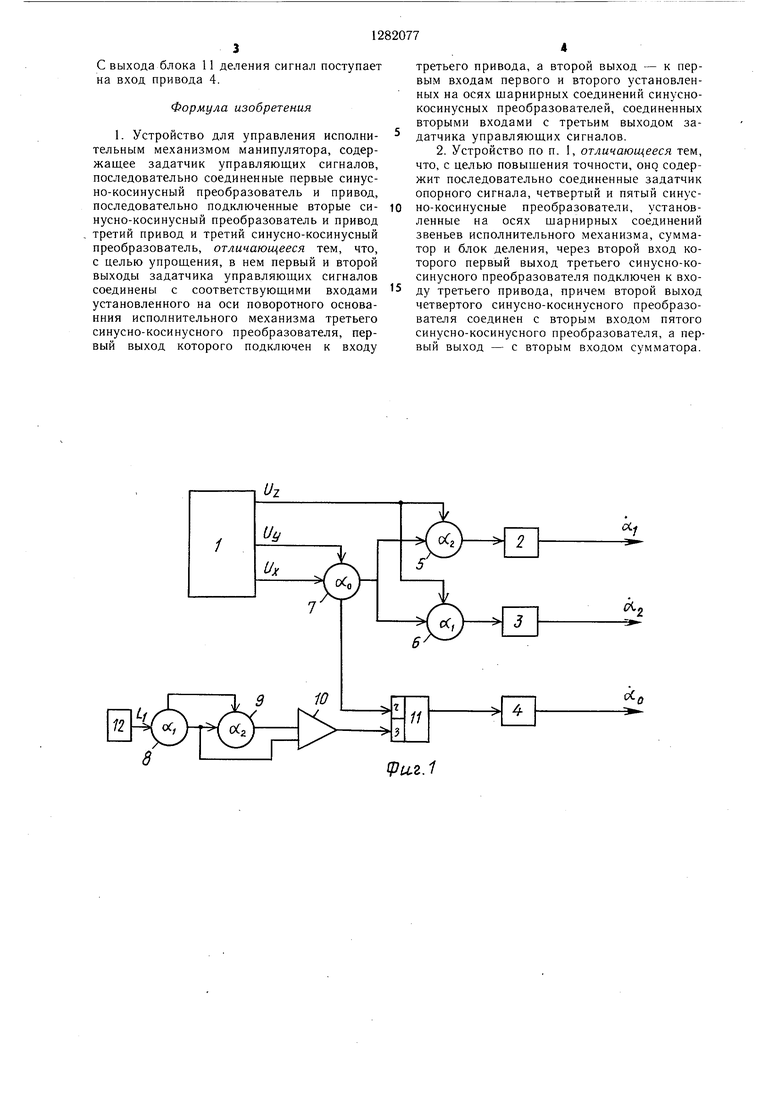
На фиг. 1 представлена функциональная схема устройства; на фиг. 2 - размещение синусно-косинусных преобразователей на исполнительном органе манипулятора.
Устройство содержит задатчик 1 управляющих сигналов, первый 2, второй 3 и третий 4 приводы, первый 5, второй 6 и третий 7 синусно-косинусные преобразователи, четвертый 8 и пятый 9 синусно-косинусные преобразователи, сумматор 10, блок 11 деления и задатчик 12 опорного сигнала, кроме того, Vx, Vy и FZ - выходные сигналы задатчика 1, ао, tti и а2 - скорости перемещения выходных координат манипулятора.
Исполнительный орган манипулятора (фиг. 2) состоит из щарнирно соединенных звеньев 13 и 14, установленных на поворотном основании 15. Он снабжен механизмом двойного параллелограмма, образованного звеньями 16-19. Перемещение звеньев манипулятора осуществляется приводами 2-4, выполненными в виде гидроцилиндров. На оси поворотного основания 15 с корпусом 20 установлен синусно-косинусный преобразователь 7. На осях щарнирных соединений звеньев 16 и 15 или 13 и 15 установлены синусно-косинусные преобразователи 6 и 8. На осях щарнирно соединенных звеньев 16 и 17 или 17 и 18 установлены синусно- косинусные преобразователи 5 и 9.
Устройство работает следующим образом. При движении исполнительного механизма вдоль оси X сигналы с задатчика 1, пропорциональные перемещениям вдоль осей У и Z и равные нулю, поступают на входы синусно-косинусных преобразователей 6-7. Сигнал, пропорциональный перемещению вдоль оси X, поступает на вход синусно-косинусного преобразователя 1. Сиг- нал, пропорциональный -X sinao с первого выхода синусно-косинусного преобразователя 7 поступает на вход привода 4. Сигнал, пропорциональный X coscco с второго выхода синусно-косинусного преобразователя 7 поступает на первые входы синусно-косинусных преобразователей 6 и 5, с выходов которых сигналы, пропорциональные X cosaocosai и -Xcosaosina2 соответственно, поступают на приводы 3 и 2. Таким образом обеспечивается движение вдоль оси X.
При движении исполнительного механизма вдоль оси Y сигналы с задатчика 1, пропорциональные перемещениям вдоль осей X и Z и равные нулю, поступают на входы синусно-косинусных преобразователей 5-7. Сигнал,, пропорциональный перемещению вдоль оси У, поступает на вход синусно-косинусного преобразователя 7. Сигнал, пропорциональный У coscto, с перво
5
о
О
5
0
5
го выхода синусно-косинусного преобразователя 7 поступает на вход привода 4. Сигнал, пропорциональный У sinao, с второго выхода синусно-косинусного преобразователя 7 поступает на первые входы синусно- косинусных прербразователей 6 и 5, с выходов которых сигналы, пропорциональные ysinaocosai и -У sinao sina2 соответствен- нно, поступают на приводы 3 и 2. Таким образом обеспечивается движение вдоль оси У.
При движении исполнительного механизма вдоль оси Z сигналы с задатчика 1, пропорциональные перемещениям вдоль осей X и У и равные нулю, поступают на входы синусно-косинусного преобразователя 7. Сигнал, пропорциональный перемещению вдоль оси Z поступает на вторые входы синусно-косинусных преобразователей 5 и 6, на первые входы которых поступает нулевой сигнал с второго выхода синусно-косинусного преобразователя 7. Нулевой сигнал с первого выхода синусно-косинусного преобразователя 7 поступает на вход привода 4. Сигналы с выходов синусно-косинусных преобразователей 6 и 5, пропорциональные Z sinai и Z cosag соответственно, поступают на входы приводов 3 и 2. Таким образом обеспечивает движение вдоль оси Z.
С целью повыщения точности обработки управляющих воздействий по осям X и Y вводится корректирующий сигнал, поступающий с блока 10 на вход знаменателя блока 11 деления. Этот сигнал пропорционален расстоянию от оси поворота манипулятора до проекции рабочей точки манипулятора на плоскость XOY. Благодаря введению блоков 8-12 рабочая точка манипулятора отрабатывает движение в строго заданном направлении.
На вход синусно-косинусного преобразователя 8 поступает сигнал, пропорциональный длине звена 16 (Li) манипулятора. С первого выхода синусно-косинусного преобразователя 8 на первый вход синусно- косинусного преобразователя 9 поступает сигнал, пропорциональный sinai. С второго выходы синусно-косинусного преобразователя 8 на второй вход синусно-косинусного преобразователя 9 и на первый вход сумматора 10 поступает сигнал, пропорциональный L cosa:. С выхода синусно-косинусного преобразователя 9 на второй вход сумматора 10 с коэффициентом передачи пропорциональным длине звена 18 (L2) манипулятора поступает сигнал, пропорциональный sinai sina2-cosai cosas- Таким образом на выходе сумматора 10 получается сигнал, пропорциональный расстоянию от оси поворота манипулятора до проекции .рабочей точки манипулятора на плоскость XOY.
На вход числителя блока 11 деления поступает сигнал с синусно-косинусного преобразователя 7. На вход знаменателя блока 11 деления поступает сигнал с сумматора 10.
С выхода блока 11 деления сигнал поступает на вход привода 4.
Формула изобретения
1. Устройство для управления исполнительным механизмом манипулятора, содержащее задатчик управляющих сигналов, последовательно соединенные первые синус- но-косинусный преобразователь и привод, последовательно подключенные вторые си- нусно-косинусный преобразователь и привод третий привод и третий синусно-косинусный преобразователь, отличающееся тем, что, с целью упрощения, в нем первый и второй выходы задатчика управляющих сигналов соединены с соответствующими входами установленного на оси поворотного основа- нния исполнительного механизма третьего синусно-косинусного преобразователя, первый выход которого подключен к входу
третьего привода, а второй выход - к первым входам первого и второго установленных на осях щарнирных соединений синусно- косинусных преобразователей, соединенных вторыми входами с третьим выходом задатчика управляющих сигналов.
2. Устройство по п. 1, отличающееся тем, что, с целью повыщения точности, оно содержит последовательно соединенные задатчик опорного сигнала, четвертый и пятый синус- но-косинусные преобразователи, установленные на осях шарнирных соединений звеньев исполнительного механизма, сумматор и блок деления, через второй вход которого первый выход третьего синусно-косинусного преобразователя подключен к входу третьего привода, причем второй выход четвертого синусно-косинусного преобразователя соединен с вторым входом пятого синусно-косинусного преобразователя, а первый выход - с вторым входом сумматора.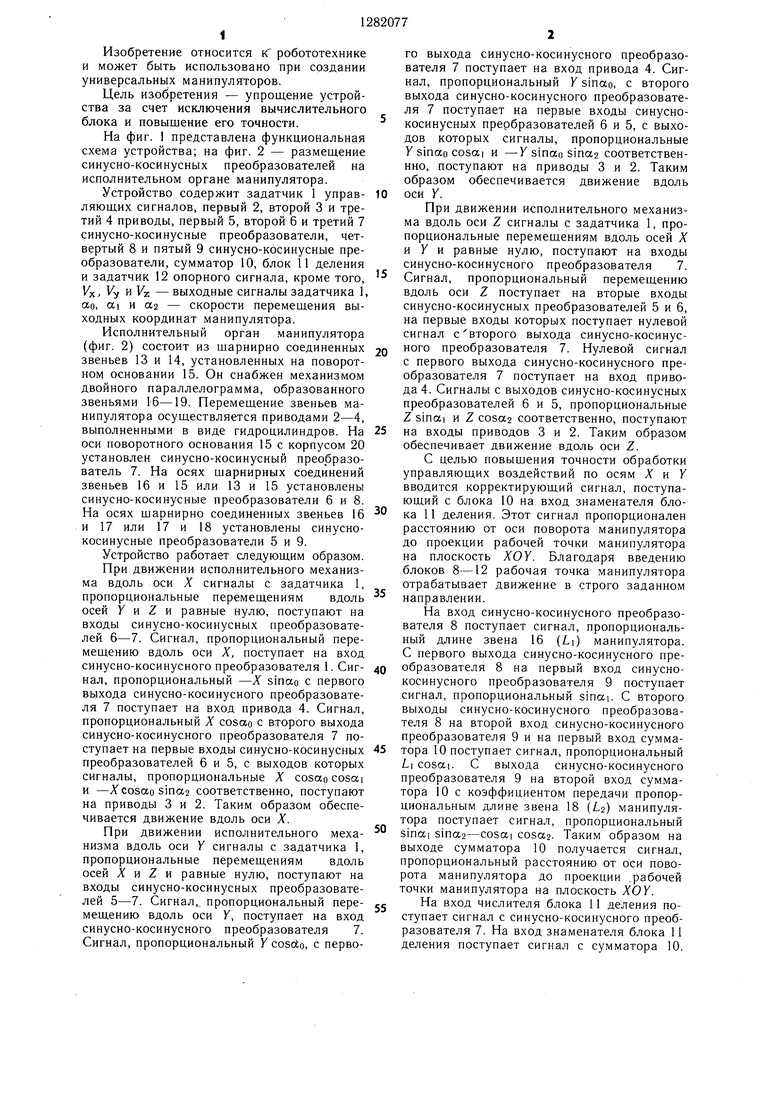
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления погрузочным манипулятором | 1983 |
|
SU1446598A1 |
| Устройство для управления манипулятором | 1981 |
|
SU970310A1 |
| Устройство для управления манипулятором | 1984 |
|
SU1229728A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2018 |
|
RU2705739C1 |
| Устройство для управления манипулятором | 1984 |
|
SU1226406A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2399080C1 |
| Рулевое управление с изменяемым передаточным числом | 1983 |
|
SU1100179A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2014 |
|
RU2565779C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2014 |
|
RU2562400C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2004 |
|
RU2258600C1 |
Изобретение относится к робототехнике и может быть использовано при создании универсальных манипуляторов. В изобретении за счет установки первого и второго синусно-косинусного преобразователей на осях шарнирных соединений, третьего синусно-косинусного преобразователя на оси поворотного основания исполнительного механизма и соответствующих связей задатчика управляющих сигналов и указанных преобразователей обеспечивается упрощение устройства. Кроме того, за счет введения задатчика опорного сигнала, четвертого и пятого синусно-косинусных преобразователей, сумматора и блока деления повышается точность устройств. 1 3. п. ф-лы, 2 ил. о л ю сх го 
1
а(,.
fpuz.f
W
У
| Жавнер ,В- А | |||
| и др | |||
| Погрузочные манипуляторы.-Л.: Машиностроение, 1975, с | |||
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| Устройство для управления манипулятором | 1981 |
|
SU970310A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
