Изобретение относится к робототехнике и может быть использовано при создании дистанционнык копируюи их манипуляторов.
Цель изобретения повьЕиение точности устройства за счет повьшения точности компенсации стозшости статических моментов при наличии крена и дифферента основания.
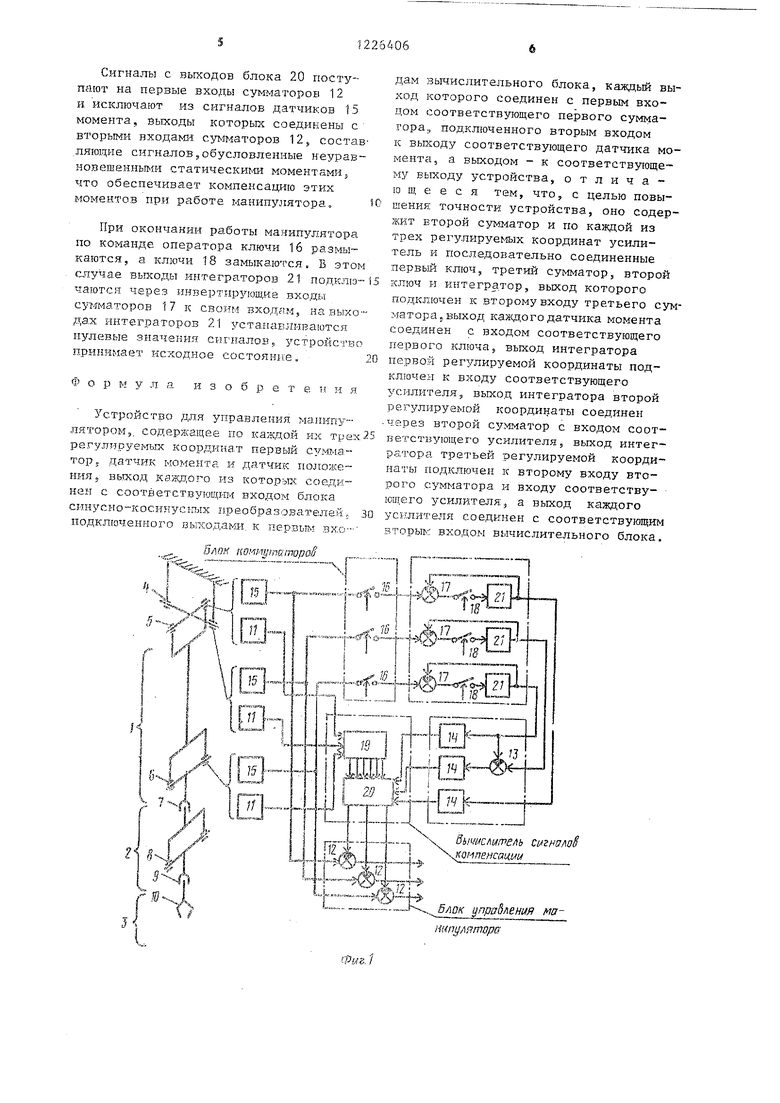
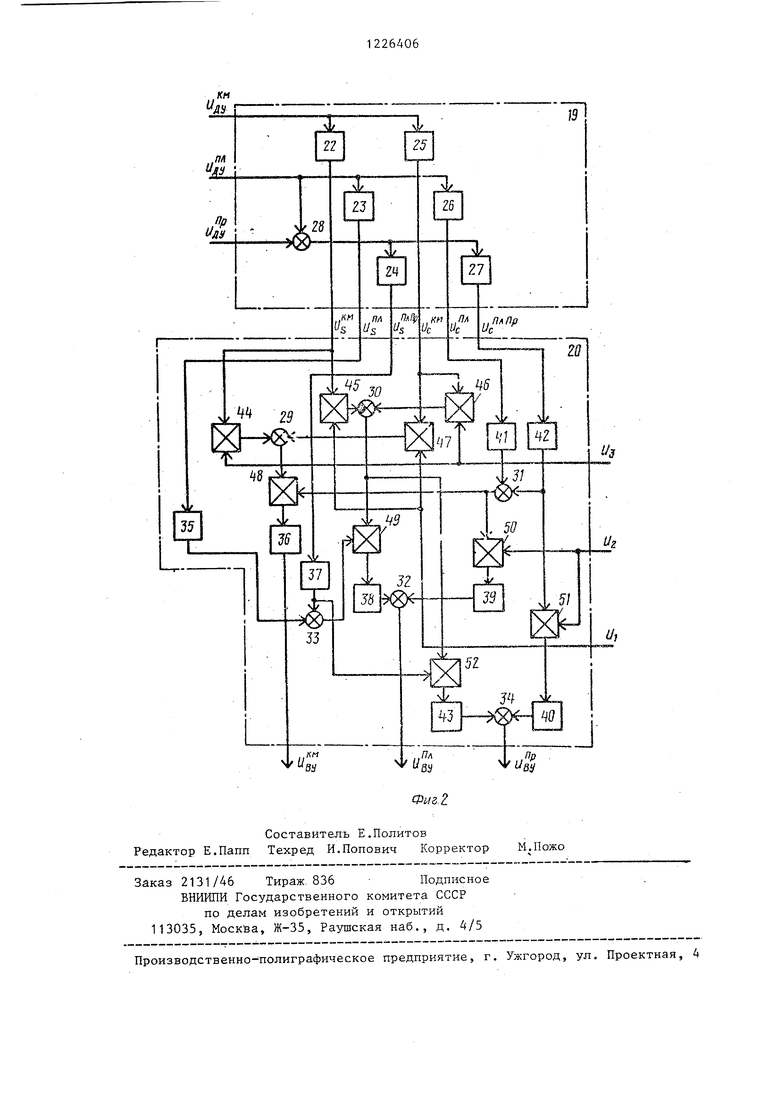
На фиг, 1 показана функциональная . схема устройства; на фиг. 2 - фрикционная схема блока синусно-косинус- ных преобразователей и вычислительного блока.
Устройство (фиг. 1) содержит зве- но 1 плеча, звено 2 предплечья,звено 3, кисти,.первую регулируемую координату 4 (качание манипулятора) ,, вторую регулируемую координату 5 (качание плеча), третью регулируемую коор динату 6 (качание предплечья) координаты 7-10 ротации кисти, :к:ачания кисти, ротации захвата, перемещения захвата соответственно, датчики 11 положения, первые сумг-1аторы 12, вто- рой сумматор 13, усилители 14, датчики 15 момента, первые ключи 16, третьи сумматоры 17, вторые ключи 18, блок 19 синусно-косинусных преобразователей, вычислительный блок 20, интеграторы 21.
В блок синусно-косинусныж преобразователей (фиг. 2) .входят скнусньге преобразователи 22-24, косинусные преобразо1затели 25-27, а вычислител 1ШЙ блок имеет сумматоры 28-34 усилители 35-43, блоки 44-52 умножения,
Устройство работает следующим образом.
В исходном положении ключи 1 б разомкнуты, ключи 18 замкнуты, звенья 1 - 3 манипулятора находятся в вертикальном положении. Звено 3 манипулятора статически уравновешено относи- тельно координат 7-10., а силы тяжест звена 3 и неуравновешенных звеньев . 1 и2 создают в ко ординатах 4 -, б ста 7;ические моменты, которые с учетом крена и дифферента основания мапкпу- лятора описьшаются следующими выражениями :
(Sino( Cosot Cos ot ; Cosс/ Slnol)« ,Сс,,Сой(о(„,о1„,
М„ Slhoig K,Cos(,K.Cos(d,/ol,)J- i-(Cb5oi S.hOl Coso/ -Sino - Sfho.)
.(,, + (о(„„Ы,
.П:
И
5 2030
264062
М„,((К,Соз(о(„/(1„ ЧСойЫ 1,31п(Ы„,М М
Cosd Cosot,,-S,bd Sinci,
(1)
где
d
к и
,м,М,М„р- статические моменты в координатах 4-6 качан1-и манипулятора, качания плеча и качания предплечья соответственно; - углы крена и дифферента;
й/пг, n fl относительные углы поворота плеча и предплечья манипулятора вокруг осей подвижности координат 4-6;
К, и Kj - весовые коэффициен-г ты,
с„1„-.
КГ-G, к„-с„
L
„.u
г + G- L
ПР и - п
пд t np
- сила тяжести звеньев 1 - 3 плеча, предплечья и кисти соответственно;
f.,. - расстояние от центра тяжести звена 1 плеча до оси качания звена 1 плечаI - расстояние от центра тяжести звена 2 предплечья до оси качания звена 2 предплечья;
1„,и1„р - длина звеньев 1 и 2 плеча и предплечья соответственно.
3 исходном положении согласно выражениям (1) статические моменты в координатх 4 - 6 неуравновешенных звеньев манипулятора зависят только от углов крена и дифферента и имеют вид
,Smc(;
M,--K,(,s:hotg K5Cosc,,Cosot ; М,,-K CoSti Cosdg(2)
датчиков 15 момента, установленных в координатах 4-6 неурав новешекньпс звеньев манипулятора,име- К Т .вид
..
.м„„.к,,
-C--,пp-SJ a -S кC°SO(
(К.Cosu/.,SihtX -i-k Coso/CostfJ,
кa
(3)
где К - коэффициент передачи дат- вм
чика 15 момента.
Из выражений (1) следует, что для формирования сигналов компенсации статических моментов с учетом крена и дифферента основания манипулятора в блоки 19 и 20, помимо информации об углах поворота oi d координат 4 - 6 манипулятора, необходимо подать информацию зависящую от углов крена и дифферента. Эта информация согласно (1) может иметь вид
U -K SinoL ; y ;-K/Dsci.Smc(
U K CosoL CpsoL, СЧ)
где KO - коэффициент передачи.
Формирование сигналов, соответствующих выражениям (4), осуществляется на основе сигналов датчиков 15 момента, описьшаемых выражениями (3)
Для этого выходы датчиков 15 момента подключаются через ключи 16, сумматоры 17, ключи 18 к входам интеграторов 21, благодаря чему на выходах последних устанавливаются значения сигналов соответствующих сигналам датчиков 15 момента: на перII км
вом выходе - сигналу-Ц, , , на втоПП на третьем -и;
БМ
Р°
Сигналы с выходов интеграторов 21 поступают на входы усилителей . 14 выходные сигналы которых формируются согласно выражениям
I км 1
.-.s-°i. .
V,x,-- -С н cosot.sinc(, -,
ых/ .- .
где К , к и - коэффициенты передачи усилителей 14 координат
1Ц
Значения коэффициентов К
-I
.К
-I l
И К. устанавливаются исходя из обесМ1(
печения равенства соответствующих выражений (4) и (5), т.е.
К.
К,
11|
SM
рм
VS
в этом случае на выходах усилителей 14 устанавливаются сигналы равные
ьь,.:
и„ и
ftblXj 2
и«..и.
2264064
После установления на выходах усилителей 14 Сигналов, соответствующих выражению (7) по команде оператора размыкаются ключи 18, манипулятор
5 переводится из исходного состояния в рабочее и начинает вьтолнять задаваемые оператором рабочие операции. При этом на вь1ходаз{ усилителей 14 удерживаются постоянными (запомина10 ются) значения .сигналов, соответствующие сигналам датчиков 15 момента при исходном крене и дифференте основания манипулятора.
На основе сигналовU
вых
и
и
в MX а
И
аых
поступающих с выходов усилите- /,1 км пл
леи 14, а также сигналов U ,U
ПР
и поступающих с выходов датчиков 11 положения блоки 19 и 20 формируют в процессе работы -манипулятора сигналы компенсации статических моментов ; по следующим алгоритмам.
Блок 19 синусно-косинусных преобразователей вырабатывает сигналы:
25
30
.
35
40
45
- выходные сигналы синусно- косинусных преобразователей 22-27;
Ug - масштаб по напряжению синусно-косинусных преобразователей 22-27}
К.р - коэффициент передачи датчиков 11 положения. Блок 20 формирует.сигналы компенсации статических моментов:
:-к:-(и.и%и,иГ)ск,и:.к,
-Ksu.(K.u:vK,u:-VKXur-u,u-)4
50
плПА.ПР,
(К,, );
ПРплпР гкмкм, плпР
ие,вМЛ -(зЧ -Ци, )K,U, ,
теав55
)
где и
bV
,ПА
м
ии
BV
s
-вьЕХодные сигналы блока 20.
-масштабный коэ4)фициент.
Сигналы с выходов блока 20 поступают на первые входы сумматоров 12 и исключают из сигналов датчиков 15 момента, выходы которых соединеньз с вторыми входами сумматоров 12 состав .ляющие сигналов5обусловленные неуравновешенными статическими моментами что обеспечивает компенсацтню этих моментов при работе манипулятора,
При окончании работы манипулятора по команде оператора ключи 1 б размыкаются, а ключи 18 замьжаготся, В этом случае выходы ир1теграторов 21 подключаются через инвертирующие входы су7 1маторов 17 к своим входам, на выходах интеграторов 21 устанавливаются нулевые значения сигналов,, устройство принимает исходное состояние.
Ф о р мула и 3 о б р е т е н и я
Устройство для управления мапиггу- лятором,. содерлсащее по ка;здо.й их трех регулируемых коор/динат первый cyMi.ia- тор, датчик момента и датчик положения, выход каждого из которопс соеди- неи с соответствующ1-ш входом блока синусно-косинусюлх преобразователей; подключенного выходами, к первым вхо-дам вычислительного блока, каждый выход которого соединен с первьм входом соответствующего первого сумма- гора., подключенного вторым входом к выходу соответствующего датчика момента, а выходом - к соответствующему выходу устройства, отличающееся тем, что, с целью повышения точности устройства, оно содержит второй сумматор и по каждой из трех регулируемых координат усилитель и последовательно соединенные первый ключ, третий сумматор, второй ключ и интегра.тор, выход которого подключен к второму входу третьего суматора, выход каждого датчика момента соединен с входом соответствующего первого клЕоча 5 выход интегратора первой регулируемой координаты подключен к входу соответствующего усилителя, выход интегратора второй регулируемой координаты соединен через второй сумматор с входом соответствующего усилителя 5 выход интегратора третьей регулируемой координаты ггодключен к второму входу второго сумматора и входу соответствующего усилителяJ а выход каждого усилителя соединен с соответствующим вторык входом вычислительного блока.
siOMi-ijirnamopoS
„..„„..„„..
ci zHiJAsS KOMfjeHCduuif
блок упра&Авнм ма-
Фиг. 1
Составитель Е.Политов Редактор Е.Папп Техред И.Попович Корректор
Заказ 2131/46 Тираж. 836 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
.
Производственно полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
М.Пожо

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство компенсации статических моментов | 1975 |
|
SU561657A1 |
| Устройство для управления манипулятором | 1984 |
|
SU1229728A1 |
| Устройство для контурного управления промышленным роботом | 1984 |
|
SU1211691A1 |
| Устройство для управления манипулятором | 1981 |
|
SU970310A1 |
| СИСТЕМА КОМПЕНСАЦИИ СТАТИЧЕСКОГО МОМЕНТА | 1973 |
|
SU373141A1 |
| Устройство для имитации движения судна вблизи берега | 1982 |
|
SU1084830A1 |
| Устройство для моделирования качки | 1986 |
|
SU1334168A1 |
| Устройство для компенсации статических моментов манипулятора | 1979 |
|
SU881654A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДВОДНЫМ РОБОТОМ | 2013 |
|
RU2524034C1 |
| Амплитудно-фазовый анализатор гармоник | 1985 |
|
SU1272272A2 |
Изобретение относится к области робототехники и может быть использовано при создании дистанционных коли- рирующих манипуляторов. В предложенном устройстве за счет введения сумматора и по каждой из трех регулируемых координат усилителя, двух ключей, сумматора и интегратора повышается точность устройства. 2 ил. to ю о 4; о О5
| Устройство компенсации статических моментов | 1975 |
|
SU561657A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Медведев B.C | |||
| Системы, управления манипуляционных роботовгМ.: Наука, 1978, с | |||
| Питательный кран для вагонных резервуаров воздушных тормозов | 1921 |
|
SU189A1 |
