Изобретение относится к робототехнике и может быть использовано при создании погрузочно-разгрузочных манипуляторов,
Известно устройство для управления манипулятором, содержащее задатчик управляющего сигнала, датчики перемещения, усилители, гидроприводы и исполнительный механизм
Недостатком устройства является сложная конструкция исполнительного механизма.
Наиболее близким техническим решением к предлагаемому является устройство, содержащее датчик управляющего сигнала, первыгл и вторым выходом соединенный с первыми входами первого и второго сумматора соответственно, последовательно соединенные первый усилитель, первый электрогидропреобразователь и первый гидропривод, связанный с исполнительными механизмом, а также последовательно соединенные второй усилитель, второй электрогидропреобразователь и второй гидропривод, связанный с исполнительным механизмом С 2 .
Недостатком этого устройства является сложность конструкции исполнительного механизма, обусловленная наличием горизонтальной направляющей, снижающей маневренность манипулятора .
Цель изобретения - упрощение устройства.
Поставленная цель достигается тем, что устройство содержит первый и второй синусно-косинусный преобразова10тели и последовательно соединенные связанный с первым гидроприводом датчик перемещения и третий синуснокосинусный преобразователь, первый и второй выходаг которого подключены
15 к вторым входам первого и второго сумматора соответственно, выходы которых соединены с первыми входами первого и второго синусно-косинусных преобразователей соответствен20но, и вторыми входами первого, и второго синусно-косинусных преобразователей соответственно, выходами подключенных к входам соответствующих усилителей.
25
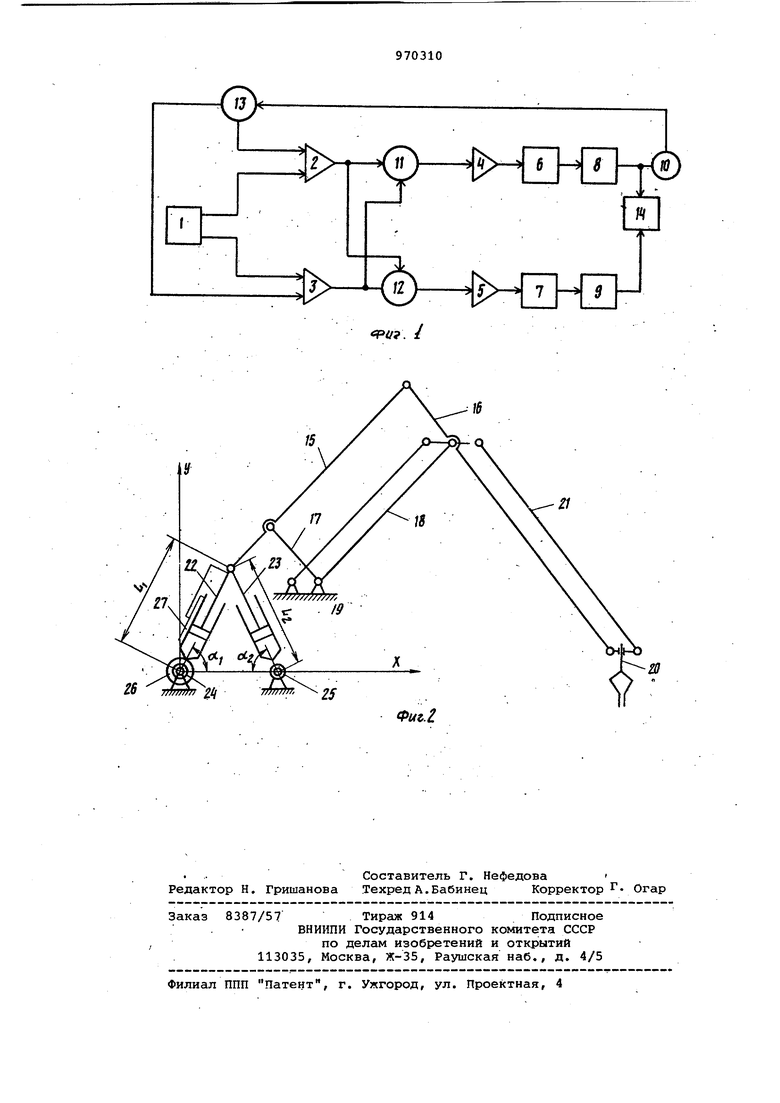
На фиг. 1 изобрс1жена функциональная схема устройства; на фиг. 2 кинематическая схема исполнительного механизма.
Устройство содержит (фиг. 1/ за30датчик 1 управляющего сигнеша, первый 2 и второй 3 cyMr-iaTOpH, первый
4и второй 5 сумматоры-усилители, первый б и вторб 7 электрогидропреобразователи, первый 8 и второй 9 гидроприводы датчик 10 перемещения, первый 11, второй 12 и третий 13 синусно-косинусный преобразователи, исполнительный механизм 14.
На фиг. 2 указаны: эвенья 15-18 исполнительного механизма 14, основание 19, рабочий орган 20, механизм 21 двойного параллелограмма, гидроцилиндры 22 и 23, синуснот-косинусные преобразователи 24-26 датчик 27 пе.ремещения.
Устройство работает следующим образом.
ИсполнительJ ый механ изм состоит из механизма пантографа, образованного из звеньев 15-18, один из шарниро которого закреплен на основании 19. Рабочий орган 20 кинематически, через механизм двойного параллелограмма 21, связан с основанием 19. Ведущий орган - шарнир механизма пантографа связан с осью шарнирного соедиг нения гидроцилиндров 22 и 23. На ося шарнирного -соединения гидроцилиндров с основанием установлены синусно-косинусные датчики 24-26, а на цилиндре 8 - датчик 27 линейного перемещения. С датчика 1 поступает управляющий сигнал и, соответствующий требуемому значению координаты X, с датчика 10 - сигнал (J, пропорциональный длине гидроцилиндра 22, поступает на обмотку возбухадения синусно-косинусного преобразователя. С косинусного выхода датчика 13 на вхо сумматора 2 поступает сигнал U со, а{ а с выхода сумматора 2 - сидгнал (.U -U cosot,,), который поступает на входные обмотки синусно-косинусных преобразователей 11 и 12. Тогда с выхода преобразователя 11 на выход преобразователя 12,, на вход усилителя.
5поступает сигнал (U x-U cosot ).Указанное соотношение сигналов преобразуется в выходные скорости гидроприводов В и 9 соответственно по зависим1)стям
(..K05dl./
U Vj -СИу-И С05 -ОС05 а. причем указанное соотношение скоростей. соответствует движению оси шарнирного соединеня гидроприводов 8 . и 9 .вдоль оси X. Если с 1 на вход сумг атора 3 поступает , управляющий сигнал UvI соответствующий требуемому значению координаты У, то с выхода cy 1мaтopa 3 снимается стлтнал(. Ovj-U indi) / поступающий на другие входные обмотки синуснокосинусных преобразователей 11 и. 12
и с выхода преобразователя 11 на вход усилителя поступает сигнал Си,,-U.,siHc. Sinot , а с выхода преобразователя 12 на йход усилителя 5 поступает сигнал
CUv-U,ei(io(.)5inati Указанное соотношение сигналов преобразуется в выходные скорости гидроприводов 8 и 9 соответственно, по зависимостям V y Kv%-UisinAi)einc. м V2N, lCv(Mii-M,sindt)eind при этом ось шарнирного соединения гидроцилиндров 22 и 23 перемещается параллельно оси. При совместной подаче управляющих сигналов возможно обеспечение любых заданных траекторий-оси шарнирного соединения гидроцилиндров 22 и23, которое преобразуется с помощью исполнительного механизма в виде пантографа в программное движение рабочего органа 20.
Применение изобретения позволит гупростить устройство и повысить маневренность исполнительного механизма манипулятора.
. Формула изобретения
Устройство для управления манипулятором, содержащее задатчик управляющего сигнала, первыми и вто|рым выходом соединенный с первыми входами первого и второго сумматора соответственно, последовательно соединенные первый усилитель, первый рлектрогидропреобразователь и первый усилитель,, первый гидропривод, связанный с исполнительным механизмом, а также последовательно соединенные второй усилитель, второй злектрогидропреобразователь и второй гидропривод, связанный с исполнительным механизмом, отличающееся тем, что, с целью управления устройг ства, оно содержит первый и второй синусно-косинусные преобразователи и последовательно соединенные связанный с первым гидроприводом датчик перемещения и третий синусно-косинусный преобразователь, первый и второй выходы которого подключены к вторым входам первого и второго сумматора соответственно, выходы которых соединены с первыми входами первого и второго синусно.-косин.усных преобразователей соответственно и вто14ыми входами второго и первого синусно- косинусных преобразователей соответственно, вьгходами подключенных к входам соответствующих усилителей.
Источники информации, принятые во. внимание при экспертизе
1.Авторское свидетельству СССР № б023бе, кл. В 25 J 9/00, 1977.
2.Авторское свидетельство СССР по заявке P 2918463/00, В 25 J 9/00, 1980 ( прототип/.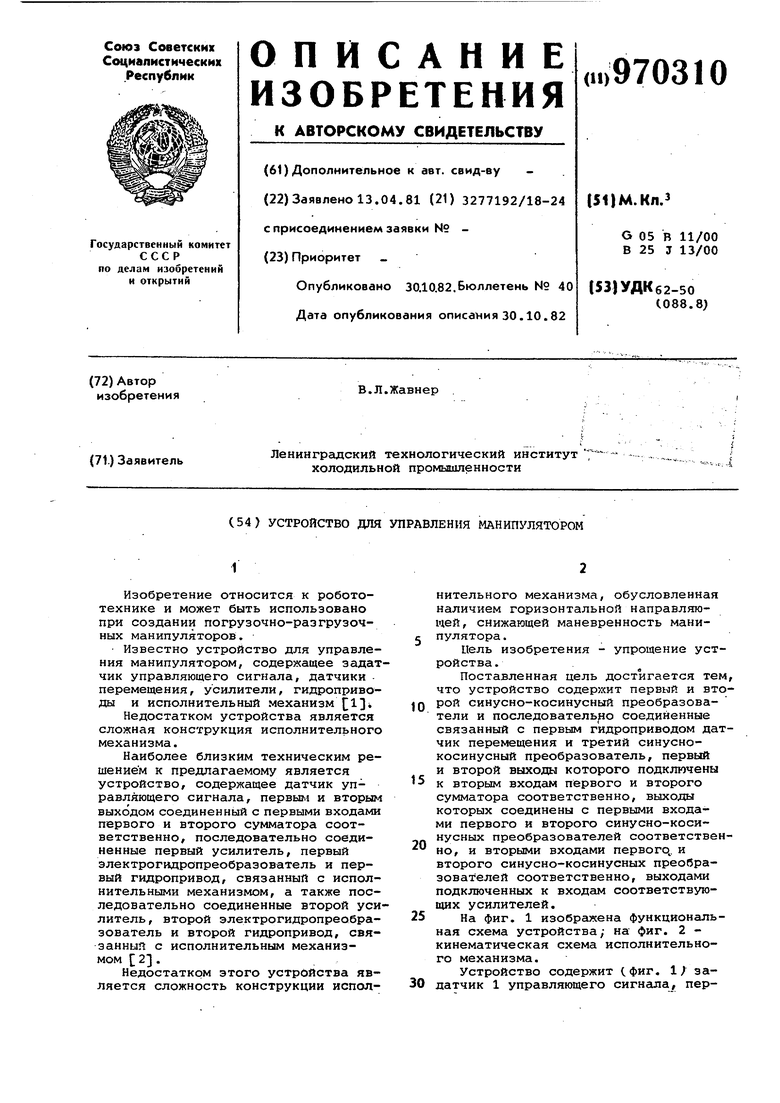
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления погрузочным манипулятором | 1983 |
|
SU1446598A1 |
| Устройство для управления манипулятором | 1984 |
|
SU1226406A1 |
| Следящая система | 1982 |
|
SU1118961A1 |
| Преобразователь угла поворота вала в код | 1980 |
|
SU942097A1 |
| Преобразователь синусно-косинусных сигналов переменного тока в код | 1982 |
|
SU1043702A1 |
| Преобразователь угла поворота вала в код | 1982 |
|
SU1088044A2 |
| Устройство для управления исполнительным механизмом манипулятора | 1983 |
|
SU1282077A1 |
| СЛЕДЯЩИЙ ПНЕВМО- ИЛИ ГИДРОПРИВОД ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2009 |
|
RU2473822C2 |
| Преобразователь угла поворота вала в код | 1980 |
|
SU866570A1 |
| Устройство для автоматического управления экскаватором | 1977 |
|
SU692950A1 |