14
Изобретение относится к робототехнике и может быть использовано при создании погрузочных манипуляторов.
Известны устройства для управления погрузочным манипулятором. Устройство l, содержащее рукоятки управления, механизм стабилизации, датчик положения, блок управления и приводы, имеет низкую точность позицио- нирования.
Наиболее близким по технической сущности к предлагаемому является устройство t2J, содержащее последовательно соединенные задатчик управляющего сигнала, первые сумматор, си- нусно-косинусный датчик, усилитааь, электрогидропреобразователь и .гидро
ЦИЛИ1ЗДР, а также последовательно
20
включенные вторые сумматор, синусно- косинусньй датчик, усилитель, электрогидропреобразователь и гидроцилиндр, выход третьего синусно-косинусного датчика подключен к первому входу второго сумматора, второй вход которого 25 соединен с вторым выходом задатчика управляющего сигнала, причем первый и второй синусно-косинусный датчики установлены на осях соответствующих грздроцнвиндров, мтоки которых шарнир-30 но соединены между собой и с ведущим шарниром механизма пантографа.
Недостатком этого устройства являются сложность конструкции исполнительного механизма и наличие ошибки 35 в измерении выходных координат исполнительного механизма.
Цель изобретения - упрощение и повышение точности устройства.
Сущность изобретения заключается в том, что в устройство, содержащее последовательно соединенные задатчик управляющего сигнала, первые суммато сииусно-косинусный датчик, усилитель электрогидропреобразователь и гидроцилиндр, а также последовательно включенные вторые сумматор, синусно- косинусный датчик, усилитель, электргидропреобразователь и гидроцилиндр, выход третьего синусно-косинусного датчика подключен к первому входу второго сумматора, второй вход которого соединен с вторым выходом задатчика управляющего сигнала, причем первый и второй синусно-косинус- ные датчики установлены на осях соответствующих гидроцилиндров, штоки которых шарнирно соединены между со
5
0
50
5
0
.- 0
5
бой и с ведущим шарниром механизма пантографа, введен четвертый синусно- косинусньй датчик, первый выход которого соединен с первым входом третьего синусно-косинусного датчика и третьим входом второго сумматора, а второй выход - с соответствующими входами первого сумматора и третьего синусно-косинусного датчика, подключенного вторым выходом к третьему входу первого сумматора, причем третий синусно-косинусный датчик установлен на оси шарнирного соединения звеньев механизма пантографа, а четвертый синусно-косинусный датчик - на оси соединения механизма пантографа с основанием.
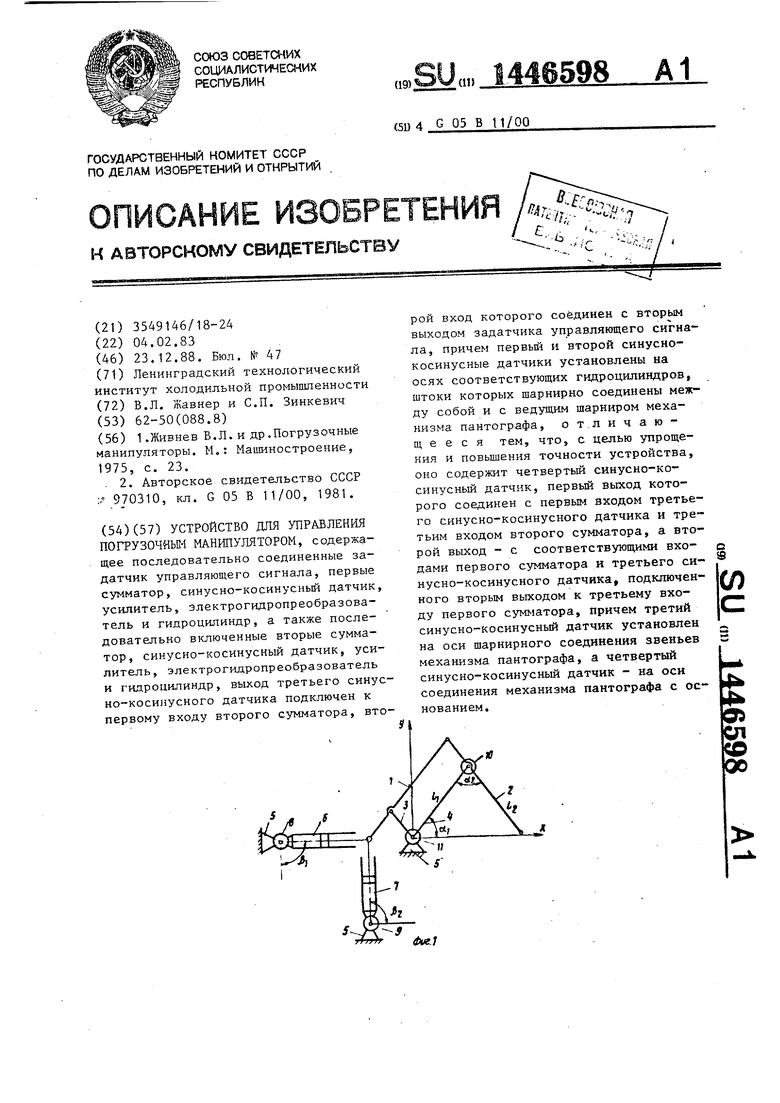
На фиг. 1 представлена кинематическая схема устройства; на фиг. 2 - функциональная схема. На фиг. 1 указаны первое, второе, третье и четвертое зв.енья 1-4 механизма пантографа соответственно, основание 5, первьш и второй гидроцилиндры 6 и 7 соответственно, первый и второй, третий и четвертый синусно-косинусные датчики 8, 9 и 10, 11 соответственно, oi., . - углы поворота звеньев механизма пантографа; в, и Л - углы поворота первого и второго гидроцилиндров соответственно; L и Ly - длина звеньев 4 и 2 соответственно; X, Y - оси координат.
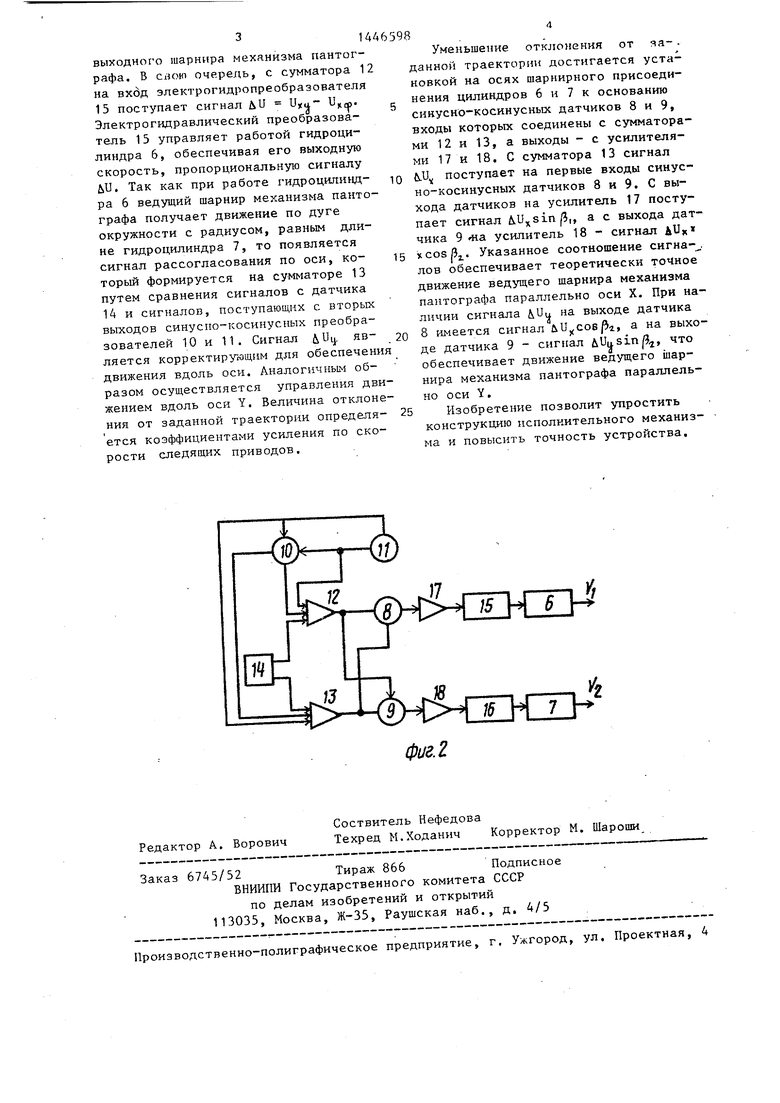
На фиг. 2 указаны первый и второй сумматоры 12 и 13 соответственно, задатчик 14 управляющего сигнала, первый и второй электрогидропреоб- разователи 15 и 16 соответственно.
Устройство работает следующим образом.
С задатчика 14 на вход сумматора 12 поступает управляющий сигнал, соответствующий ..например, требуемому значению координаты X. С первого выхода синусно-косинусного датчика 11 на первьш вход синусно-косину сного преобразователя 10 и вход сумматора 12 поступают сигналы 9/1, а с его второго выхода на второй вход синусно-косинусного преобразователя 10 - сигнал L sioix, .
С первого выхода синусно-косинусного преобразователя 10 на вход сумматора 12 поступает сигнал L sinoi,x )( L cosoi,sinoii, что в сумме с сигналом L, cos oil пропорционально фактическому значению координаты Х
выходного шарнира механизма пантографа, В слою очередь, с сумматора 12 на вхбд электрогидропреобразователя
и
15 поступает сигнал MJ . Электрогидравлический преобразователь 15 управляет работой гидроцилиндра б, обеспечивая его выходную скорость, пропорциональную сигналу Ьи, Так как при работе гидроциливд- ра 6 ведущий шарнир механизма пантографа получает движение по дуге окружности с радиусом, равным длине гидроцилиндра 7, то появляется сигнал рассогласования по оси, ко- торый формируется на сумматоре 13 путем сравнения сигналов с датчика 14 и сигналов, поступающих с вторых выходов синуспо-косинусных преобразователей 10 и 11. Сигнал AUi|, яв- ляется корректирующим для обеспечения движения вдоль оси. Аналогичным образом осуш,ествляется управления движением вдоль оси Y. Величина отклонения от заданной траектории, определи- ется коэффициентами усиления по скорости следящих приводов.
Уменьшение отклонения от
яа- .
данной траектории достигается установкой на осях шарнирного присоединения цилиндров 6 и 7 к основанию синусно-косинусных датчиков 8 и 9, входы которых соединены с сумматорами 12 и 13, а выходы - с усилителями 17 и 18. С сумматора 13 сигнал и поступает на первые входы синусно-косинусных датчиков 8 и 9. С выхода датчиков на усилитель 17 поступает сигнал U sinf5,, а с выхода датчика 9 На усилитель 18 - сигнал AUx f.cosBj, Указанное соотношение сигналов обеспечивает теоретически точное движение ведущего шарнира механизма пантографа параллельно оси X. При наличии сигнала Un на выходе датчика 8 имеется сигнал MJ coepi, а на выходе датчика 9 - сигнал iUusin, что обеспечивает движение ведущего шарнира механизма пантографа параллельно оси Y,
Изобретение позволит упростить конструкцию исполнительного механизма и повысить точность устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления манипулятором | 1981 |
|
SU970310A1 |
| Устройство для управления исполнительным механизмом манипулятора | 1983 |
|
SU1282077A1 |
| ЭЛЕКТРОПРИВОД РОБОТА | 2012 |
|
RU2488480C1 |
| Электрогидравлический следящий привод | 1988 |
|
SU1557370A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯЦИОННОГО РОБОТА | 2015 |
|
RU2593735C1 |
| ЭЛЕКТРОПРИВОД РОБОТА | 2012 |
|
RU2488479C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2017 |
|
RU2688448C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯЦИОННОГО РОБОТА | 2017 |
|
RU2688449C1 |
| ЭЛЕКТРОПРИВОД РОБОТА | 2012 |
|
RU2489250C1 |
| Рулевое управление с изменяемым передаточным числом | 1983 |
|
SU1100179A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| и др.Погрузочные манипуляторы | |||
| М.: Машиностроение, 1975, с | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР : | |||
| Устройство для управления манипулятором | 1981 |
|
SU970310A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
