11
1зобретение относится к машино- строению, в частности к микромани- пуля оростроению, и может быть использовано для биологических исследований.
Целью изобретения является увеличение стабильности перемещения и повышение долговечности микроманипулятора.
На фиг. 1 представлен схематично предлагаемый микроманипулятор; на фиг. 2 - разрез А-А на фиг. Т.
Микроманипулятор содержит корпус 1, в котором в направляющих 2, например шариковых, установлен держатель 3 с микроэлектродом 4 и шаговый привод, содержащий тонкие то- копроводящие пластины 5 (например из пермалоя), одни концы которых жестко закреплены на корпусе 1, а другие концы соединены гибкой диэлектрической пленкой с односторонней металлизацией 7 (например алюминиевой), расположенной с зазором эквидистантно боковой поверхности держателя 3. Эквидистантно пластинам 5 установлены управляющие электроды 8, а держатель 3, имеющий форму четьфехугольника (например алюминиевый) покрыт слоем диэлектрика 9 (например капролоном) с хорошими фрикционными свойствами. Источник питания (не показан) подключен к металлизированному слою пленки 6, держателю 3, управляющим
электродам 8. Пластины 5 имеют нуле- 35 говечности, шаговый привод выполнен
вой потенциал. Микроэлектрод 4 при помощи гибкого проводника подключен к блоку регистрирующей аппаратуры (не показан),
Устройство работает следующим образом.
При подключении постоянного напряжения к держателю 3 и металлизированному слою пленки 6 в промежутке между ниьш возникает электростатическая си- ла, под действием которой гибкая пленка 6 притягивается к боковой поверхности держателя 3, При подключении постоянного напряжения к управлякщим
в виде токопроводящих пластин, одни . концы которых жестко связаны с корпусом, а другие соединены гибкой диэлектрической пленкой, металлизи- 40 рованной с одной стороны и установленной с зазором эквидистантно к боковой поверхности держателя, покрытого слоем диэлектрика, причем токо- проводящие пластины расположены эквидистантно установленным на корпусе управляющим электродам, а держатель, металлизированная пленка и электроды подключены к соответствующим клеммам источника питания.
электродам 8 под действием электростатических сил, возникаюБщх между пластинами-5 и электродами 8 пластины 5 изгибаются в сторону электродов 8, к которым подключено напряжение.
При изгибе пластин 5 происходит перемещение гибкой пленки 6, а так как пленка 6 прижата к боковой поверхности держателя 3, то происходит и перемещение держателя 3, несущего микроэлектрод 4. При отключении напряжения от держателя 3 и металлизированного слоя пленки 6 последняя за счет своей эластичности возвращается в исходное положение. При снятии напряжения с электродов 8 пластины 5 за счет сил упругости возвращаются в исходное состояние.
Таким образом, осуществляются поступательные перемещения держателя 3 на один шаг. Реверсирование осуществляется при подключении напряжения к противоположным управляющим электродам 8.
Формула изобретения
Микроманипулятор, содержащий кор- 50 пус и установленньш в нем держатель микроэлектрода, взаимодействующий с шаговым приводом, отличающийся тем, что, с целью повышения стабильности перемещения и дол
в виде токопроводящих пластин, одни . концы которых жестко связаны с корпусом, а другие соединены гибкой диэлектрической пленкой, металлизи- 0 рованной с одной стороны и установленной с зазором эквидистантно к боковой поверхности держателя, покрытого слоем диэлектрика, причем токо- проводящие пластины расположены эквидистантно установленным на корпусе управляющим электродам, а держатель, металлизированная пленка и электроды подключены к соответствующим клеммам источника питания.
Редактор И. Рыбченко
Составитель О. Романенко
Техред А.Кравчук Корректор д. Обручар
Заказ 7343/13Тираж 949
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-п олиграфическое предприятие, г. Ужгород, ул. Проектная, 4
9 3
7 8
r-iZii
777/
66
(Ри.2.2
Подписное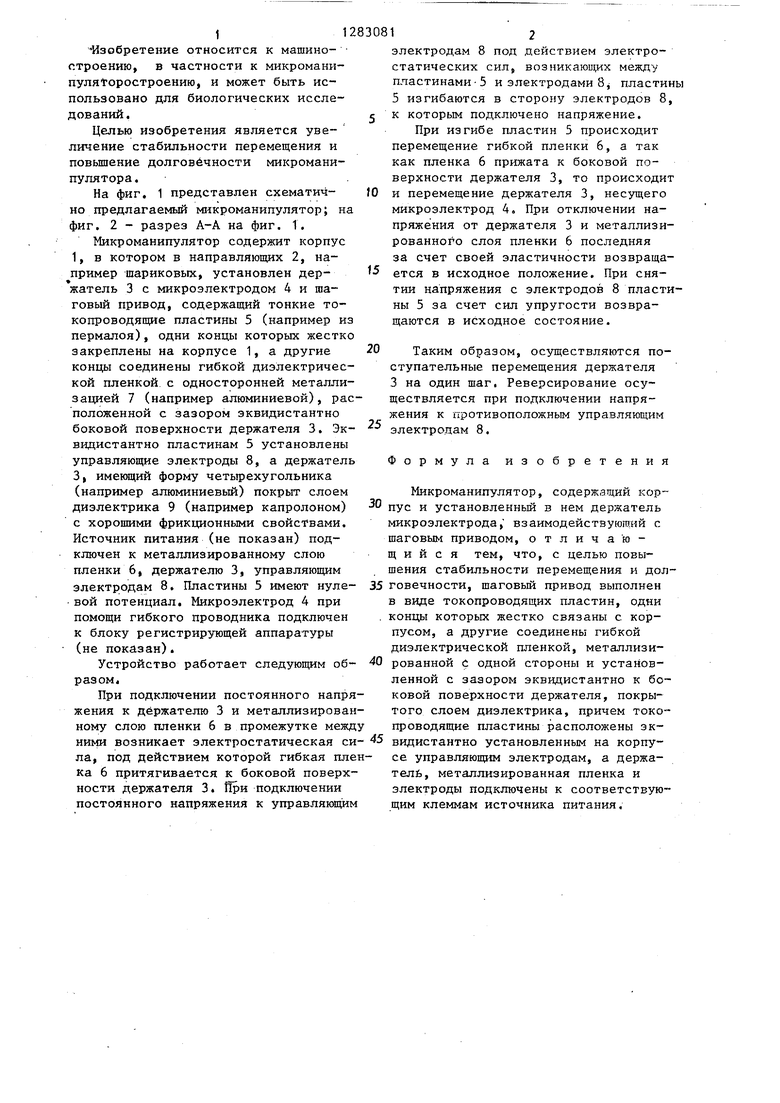
| название | год | авторы | номер документа |
|---|---|---|---|
| Электростатический преобразователь | 2021 |
|
RU2797442C2 |
| Электромеханический модулятор излучения | 1984 |
|
SU1205100A2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ МНОГОФАЗНОЙ ПОМЕХОЗАЩИЩЕННОЙ СИЛОВОЙ ШИНЫ ЭЛЕКТРОПИТАНИЯ | 2024 |
|
RU2823271C1 |
| ПОМЕХОЗАЩИЩЕННАЯ СИЛОВАЯ ШИНА ЭЛЕКТРОПИТАНИЯ | 2024 |
|
RU2822924C1 |
| Микроманипулятор | 1980 |
|
SU960004A1 |
| ПОЛУПРОВОДНИКОВЫЙ ИСТОЧНИК ИЗЛУЧЕНИЯ | 2011 |
|
RU2466481C1 |
| СПОСОБ ЕМКОСТНОГО КОНТРОЛЯ ТОКОПРОВОДЯЩЕГО СЛОЯ НА ДИЭЛЕКТРИКЕ | 1989 |
|
SU1840845A1 |
| Устройство для обработки газа в электрическом разряде | 1990 |
|
SU1756267A1 |
| РЕВЕРСИВНЫЙ ЭЛЕКТРОСТАТИЧЕСКИЙ МИКРОДВИГАТЕЛЬ ВРАЩЕНИЯ | 2012 |
|
RU2513030C2 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ КОНДЕНСАТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 1994 |
|
RU2117415C1 |
Изобретение относится к машиностроению, в частности к микроманипу- ляторостроению, и предназначено для биологических исследований. Цель изобретения - увеличение стабильности перемещения и повьшение долговечности микроманипулятора. Микроманипулятор содержит корпус 1, Б котором в направляющих 2 установлен держатель 3 с микроэлектродом 4 и тонкие токопроводящие пластины 5, концы которых соединены гибкой пленкой 6 с односторонней металлизацией. Эквидистантно пластинам 5 установлены управляющие электроды 8, а держатель 3 покрыт слоем диэлектрика. При подключении постоянного напряжения к держателю 3 и металлизированному слою пленка 6 под действием электростатических сил притягивается к поверхности держателя 3, а при подключении постоянного напряжения к электроду 8 пластины 5 изгибаются в сторону электродов G, вследствие чего происходит перемещение держателя 3, несущего электрод 4. 2 ил. i (Л С ю 00 ее о 00
| Микроманипулятор | 1980 |
|
SU960004A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
