1
Изобретение относится к манипуляторостроению и может быть использовано для биологических исследований.
Известен микроманипулятор для введения микроэлектрода скачками в биологический объект, содержащий держатель микроэлектрода, подающее устройство и привод в виде электромагнита, якорь которого снабжен ударником 1.
Недостатком его являются сложная конструкция и невысокая точность введения микроэлектродов.
Цель изобретения - повышение точности и упрощение конструкции микроманипулятора.
Поставленная цель достигается тем, что в микроманипуляторе для биологических исследований, содержащем корпус и держатель, установленный на направляющих и сопряженный с щаговым приводом, щаговый привод выполнен в виде пьёзокерамического вибратора, содержащего пьезокерамические стержни, установленные под углом друг к другу, причем одни концы стержней связаны с корпусом, а другие жестко скреплены между собой и прижаты к боковой поверхности держателя.
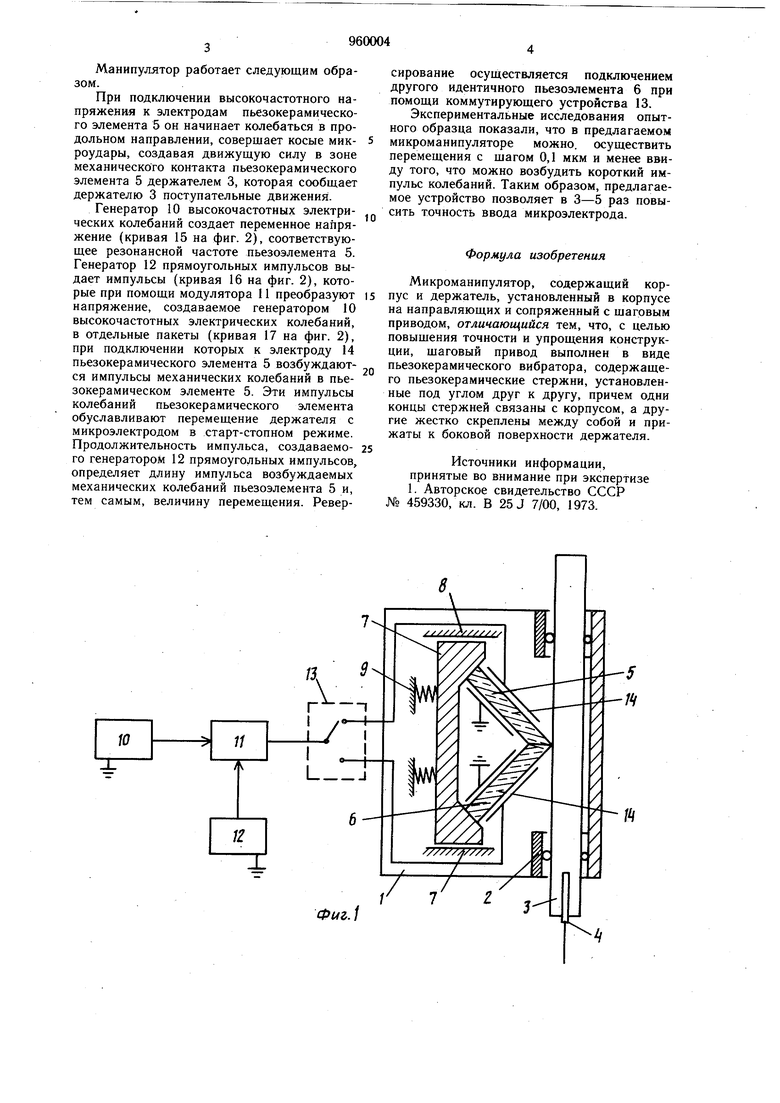
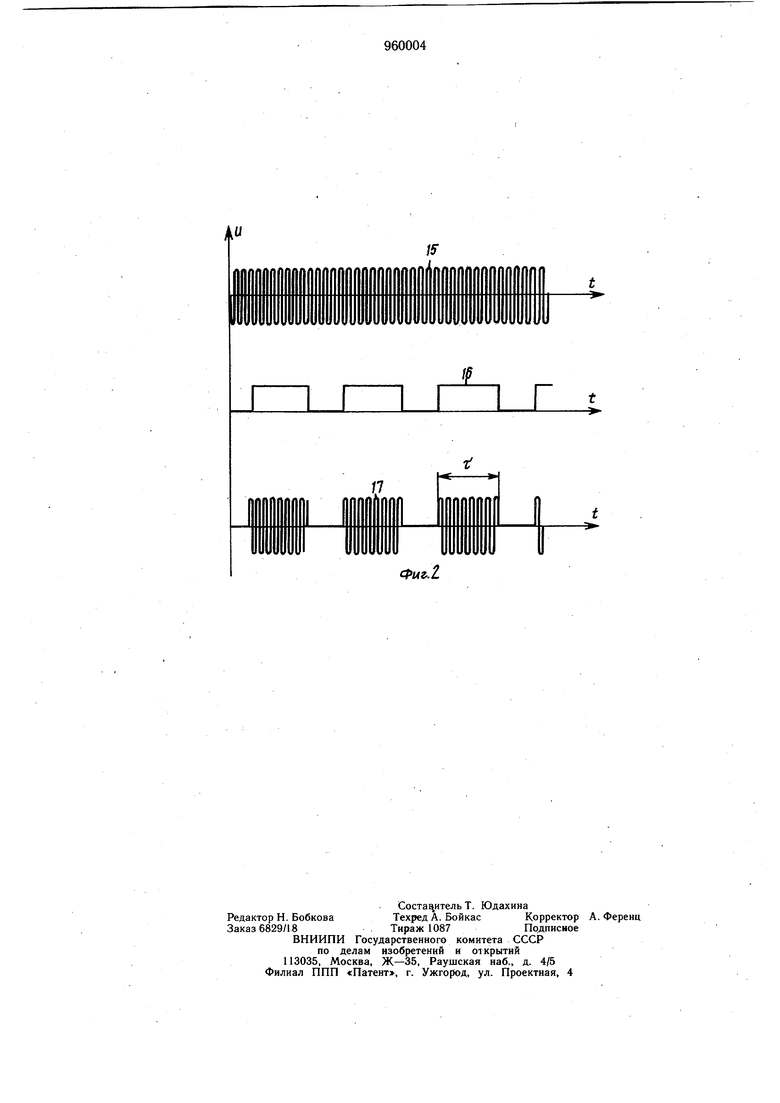
. На фиг. 1 приведена схема предлагаемого микроманипулятора; на фиг. 2 - диаграмма сигналов питающего напряжения.
Михроманипулятор содержит корпус 1, в котором в направляющих 2, например шариковых, установлен держатель 3 с микроэлектродом 4 и щаговый движитель, выполненный в виде пьезокерамического вибратора, содержащего пьезокерамические элементы 5 и 6,, установленные под углом
,0 друг к другу, одни концы которых жестко закреплены в подвижном основании 7, установленном в направляющих 8, а другие концы жестко скреплены между собой и прижаты к держателю 3 через основание 7 при помощи упругих элементов 9.
15 Выход генератора 10 высокочастотных электрических колебаний подключен к входу модулирующего устройства 11, другой вход которого подключен к выходу генератора 12 прямоугольных импульсов, а выход
2Q модулирующего устройства 11 через коммутирующее устройство 13 подключен к электродам 14 пьезокерамических элементов 5 -и 6. Микроэлектрод 4 при помощи гибкого проводника подключен к блоку регистрирующей аппаратуры (не показано). Манипулятор работает следующим образом. При подключении высокочастотного напряжения к электродам пьезокерамического элемента 5 он начинает колебаться в продольном направлении, совершает косые микроудары, создавая движущую силу в зоне механического контакта пьезокерамического элемента 5 держателем 3, которая сообщает держателю 3 поступательные движения. Генератор 10 высокочастотных электрических колебаний создает переменное напряжение (кривая 15 на фиг. 2), соответствующее резонансной частоте пьезоэлемента 5. Генератор 12 прямоугольных импульсов выдает импульсы (кривая 16 на фиг. 2), которые при помощи модулятора 11 преобразуют напряжение, создаваемое генератором 10 высокочастотных электрических колебаний, в отдельные пакеты (кривая 17 на фиг. 2), при подключении которых к электроду 14 пьезокерамического элемента 5 возбуждаются импульсы механических колебаний в пьезокерамическом элементе 5. Эти импульсы колебаний пьезокерамического элемента обуславливают перемещение держателя с микроэлектродом в старт-стопном режиме. Продолжительность импульса, создаваемого генератором 12 прямоугольных импульсов, определяет длину импульса возбуждаемых механических колебаний пьезоэлемента 5 и, тем самым, величину перемещения. Реверсирование осуществляется подключением другого идентичного пьезозлемента 6 при помощи коммутирующего устройства 13. Экспериментальные исследования опытного образца показали, что в предлагаемом микроманипуляторе можно, осуществить перемещения с щагом 0,1 мкм и менее ввиду того, что можно возбудить короткий импульс колебаний. Таким образом, предлагаемое устройство позволяет в 3-5 раз повысить точность ввода микроэлектрода. Формула изобретения Микроманипулятор, содержащий корпус и держатель, установленный в корпусе на направляющих и сопряженный с щаговым приводом, отличающийся тем, что, с целью повышения точности и упрощения конструкции, щаговый привод выполнен в виде пьезокерамического вибратора, содержащего пьезокерамические стержни, установленные под углом друг к другу, причем одни концы стержней связаны с корпусом, а другие жестко скреплены между собой и прижаты к боковой поверхности держателя. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 459330, кл. В 25J 7/00, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вибродвигатель | 1979 |
|
SU830600A1 |
| Пьезоэлектрический микроманипулятор для погружения электрода в биологическую ткань | 1984 |
|
SU1377032A1 |
| МНОГОКООРДИНАТНЫЙ ПЬЕЗОДВИГАТЕЛЬ | 1999 |
|
RU2166832C1 |
| Вибродвигатель | 1978 |
|
SU681479A1 |
| Устройство для изучения биопотенциалов биологических объектов | 1979 |
|
SU930795A1 |
| Вибродвигатель | 1981 |
|
SU968869A1 |
| Микроманипулятор | 1985 |
|
SU1283081A1 |
| Вибродвигатель | 1981 |
|
SU968868A1 |
| Устройство для контроля шерохова-ТОСТи пОВЕРХНОСТи | 1978 |
|
SU824025A1 |
| Устройство для юстировки дискового растра | 1985 |
|
SU1273863A1 |
Фиг. 1
t
1 Г
X
