Изобретение относится к медицине, а именно к методам определения кинематических параметров в суставе в трех взаимно перпендикулярных плоскостях.
Целью изобретения является выявление кинематической патологии суставов ,
Способ осуществляется посредством разработанного устройства.
На чертеже изображено устройство для осуществления способа.
Устройство имеет прямоугольную раму 1 с направляющими 2 и тарироЮ
сируют винтом гибкую тягу 22, перекидываемую через блок 23. На этом же суставном конце с помощью винтов закрепляют постоянный магнит 1А, на который устанавливают опору 15 с угловыми шкалами 17 и 18 и отвесом 19.
Перед измерением угловую шкалу компаса 13 устанавливают в нулевое положение, а угловые шкалы 17 и 18 - строго по отвесу 19. По шкалам 3,7 и 10 регистрируют начальное положение центра головки винта 11.
Перемещение сегмента на заданный угол сгибания осуществляется посредванной шкалой 3, фиксированную к пло- - ством гибкой тяги 22, при этом магнит
скости 4 посредством стоек 5 с уста новленной в ее плоскости подвижной планкой 6 со шкалой 7 и роликами 8, причем в сквозном пазу планки 6 установлена подвижно каретка 9, снабженная подпружиненной тарированной шкалой 10, свободный конец которой заканчивается винтом со сферической головкой 11 и установлен перпендикулярно плоскости 4, при этом одна из сторон прямоугольной рамы 1 жестко связана с кронштейном 12, поддерживающим измерительное устройство в виде компаса 13, ориентированного плоскостью параллельно плоскости 4, в состав измерительного устройства 13 входит постоянньй магнит 14, опора 15, связанная через шаровой шарнир 16 с угловыми шкалами 17 и 18, ориентированными под прямым углом друг к другу, и отвесом 19, фиксированным в верхней части опоры 15, что дает возможность регистрировать численные значения кинематических параметров сустава.
Анатомический препарат сустава человека, освобожденньм от мягких тканей с сохранением капсулы и связок, устанавливают на плоскость 4 так, чтобы основная плоскость движения подвижного сегмента была параллельна этой плоскости, а наиболее выступающая точка костного выступа вблизи суставной щели неподвижного суставного конца совпадала бы с осью магнитной стрелки компаса 13, после чего сегмент фиксируют к плоскости 4 гвоздями Гоффмана 20, проведенными через пластину 21. На подвижном суставном конце с помощью винта 11 закрепляют свободный конец тарированной шкалы 10, а в месте анатомического крепления мьштц-сгибателей фик
сируют винтом гибкую тягу 22, перекидываемую через блок 23. На этом же суставном конце с помощью винтов закрепляют постоянный магнит 1А, на который устанавливают опору 15 с угловыми шкалами 17 и 18 и отвесом 19.
Перед измерением угловую шкалу компаса 13 устанавливают в нулевое положение, а угловые шкалы 17 и 18 - строго по отвесу 19. По шкалам 3,7 и 10 регистрируют начальное положение центра головки винта 11.
Перемещение сегмента на заданный угол сгибания осуществляется посред- ством гибкой тяги 22, при этом магнит
0
5
0
5
0
5
0
14с установленной на нем опорой 15, двигаясь относительно неподвижного суставного конца, приводит в движение магнитную стрелку компаса 13, отклоняя ее на заданньй угол сгибания,
при этом угловые шкалы 17 и 18 отклонятся от вертикальной оси отвеса 19, шкала 10 сместится относительно шкал 3 и 7 и одновременно изменится ее длина под действием пружины, вмонтированной в каретку 9.
Перемещение сегмента проводят дискретно, разбивая полный угол сгибания сустава на несколько интервалов (i интервалов), например по 10 или
15или 20 . Регистрацию линейных
и угловых параметров проводят в начальном положении подвижного сегмента, а затем в конце каждого интервала сгибания. Линейные координаты ) одной из точек подвижного сегмента (головки винта 11) регистрируют соответственно по шкалам 10,7 и 3 (фиг.1). Угловые координаты сегмента, к которым относятся угол сгибания tp; , угол ротации gi , .угол приведения - отведения 0; , отсчитывают соответственно по шкалам 13, 17 и 18.
Координаты точки (X,Yo,Z(,), через которую проходит ось мгновенного перемещения сустава, для i-ro интервала определяют, решая систему линейных уравнений:
(1-А„ )Х„+А„4 +А„г Е,, + (1-А2г)о+А
5
Aj Xg
АЗ, Хд +A3,Cf,
+ (1-А,з)
(1)
(2) (3)
и
Д л,2
COS 9- cosvi , -sin(| . cos(9; - sin0 ;cos(f;,
312845
А,. -cosQj sinf ;cosq ,+
+sin9. sintp ., A -sinO ; coscp, A22 sin9-sin( ; -COS0;
A2 sin0 ;sin(« ;coc4 ; +
+ cosSJsinqil; АЗ, -sinc ,, -cosV; sinQj. ; A,, cos(jcos(| -;fO
cp ; , (f l ,9- определяют из- соотний:
-Cfi-, j
0: 9;-9;., ;
в которыхд);, ,, 6 ;., значения углов в конце (i-1)-ro интервала сгибания, qi; , , 8; - значения углов в конце i-ro интервала сгибания.
Коэффициенты Е,, Е, Е в уравнениях (1), (2).и (3) определяют по формулам:
где
R. |(Y Z; -YC 7. )4(Xj z; -X ; Z, ) +(x: Y; -x; Y; Г
Преимуществом спосо ба определения пространственных кинематических параметров суставов в эксперименте является точность измерения пространственных угловых и линейных характеристик с учетом физиологического наклона мгновенной оси движения сустава и одновременного пространственного ее перемещения в сагиттальной, фронтальной, трансверсальной плоскостях.
Формула изобретения
Способ определения пространственных кинематических параметров суставов в эксперименте ттутем укрепления 45 на конечности датчика углового переЕ, X, - X;
Е, У; - У; Е Z - Zгде XJ А„ Х,, +А,,У„, -н А,, Z,,, Y; А,,Х;., + Aj.Y,-., + A,,Z;., ; Z; A,,Xi.., ,,, 4-A,,Z..,
X;., , Y;., , Z;., - значения координат головки винта 11 в конце (i-l)-r интервала сгибания; Х. , Y; , Z; - координаты головки винта 11 в конце i-ro интервала сгибания.
5
0
Углы наклона мгновенной оси движения сустава к оси X, оси У и оси Z в i-TOM интервале сгибания определяют по
,-,Y Z;-Y;Zi
СО, ± arccos -J-- --i-L ;
I
I I
iл , Д 1 л i if t
CO y; i arccos ---------,
II
у у тт , Y.
U,: ±arccos i
Zl
мещения с размещением оси вращения шарнира датчика против мнимой оси вращения сустава, отличающий- с я тем, что, с целью выявления кинематической патологии суставов, фиксируют один из сегментов, размещают над мыщелком неподвижного сегмента измерительное устройство в виде компаса, а на подвижном укрепляют постоянный магнит и опору с угловыми шкалами и отвесом, дискретно изменяют положение подвижного сегмента сустава в основной плоскости перемещения, вычисляют координаты мгновенной оси движения сустава и ее углы.наклона к сагиттальной, фронтальной и трансверсальной плоскостям.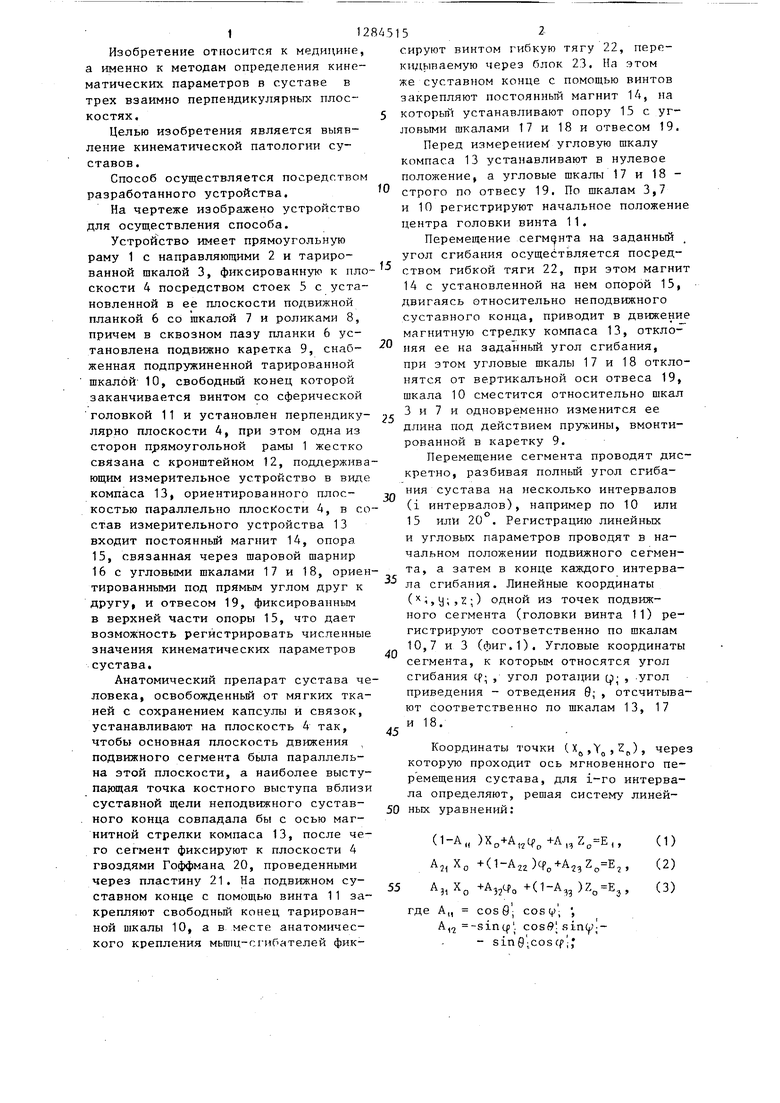

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАКРЫТОЙ РЕПОЗИЦИИ ПЕРЕЛОМОВ | 1995 |
|
RU2133114C1 |
| СПОСОБ ФИКСАЦИИ ПЕРЕЛОМОВ В ОТСУТСТВИЕ СМЕЩЕНИЙ КОСТНЫХ ФРАГМЕНТОВ | 1998 |
|
RU2193364C2 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ФУНКЦИИ СУСТАВОВ МЕХАНОТЕРАПИЕЙ (ВАРИАНТЫ) | 2004 |
|
RU2270651C1 |
| Способ использования виртуальной цифровой модели ходьбы пациента для дифференцированного построения индивидуальной программы физической реабилитации в раннем восстановительном периоде ишемического инсульта в зависимости от бассейна поражения | 2020 |
|
RU2741860C1 |
| Способ лечения переломов лодыжек, сочетающихся с повреждением межберцового синдесмоза | 2022 |
|
RU2793720C1 |
| Устройство для восстановления движений в коленном суставе после операций на капсульно-связочном аппарате | 1984 |
|
SU1232238A1 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ АНТРОПОМОРФНЫМ ШАГАЮЩИМ КОПИРУЮЩИМ РОБОТОМ | 1997 |
|
RU2134193C1 |
| Устройство для тренировки мышц спортсменов | 1989 |
|
SU1710084A1 |
| УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ РЕЗЬБЫ | 2009 |
|
RU2477453C1 |
| УСТРОЙСТВО ДЛЯ ОПЕРАЦИЙ НА НИЖНЕЙ КОНЕЧНОСТИ | 1991 |
|
RU2065735C1 |
Изобретение относится к методам определения кинематических параметров в суставе в трех взаимно перпендикулярных плоскостях С целью выявления кинематической патологии фиксируют один из сегментов анатомического препарата сустава человека с со хранением капсулы и связок, размещают над ним и на подвижном сегменте измерительные устройства, выполненные в виде компаса, постоянного магнита и опоры с угловыми шкалами и отвесом, дискретно изменяют положение подвижного сегмента сустава в основной плоскости перемещения. Вычисляют координаты мгновенной оси .движения Сустава и ее углы наклона к сагиттальной, фронтальной и трансвер- сальной плоскостям, что обеспечивает точность измерения пространственных угловых и линейных характеристик суставов. 1 ил. (Л N9 00 4i СЛ
Редактор А. Шандор
Составитель М. Пластинин
Техред М.Ходанич Корректор Л. Пилипенко
Заказ 7591/3Тираж 594Подписное
ВНИШта Государственного комитета СССР
по делам изобретений и открытий 113033, l IocKBa, , Раушская наб., д. 4/5
Производственно-полигряфическое предприятие, г. Ужгород, ул. Проектная, 4
| Филатов Б.И | |||
| Клиническая биомеханика .Л.: Медицина, 1980, с | |||
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
