Изобретение относится к медицине, а именно к механотерапии для восстановления нарушенной функции суставов.
Из предшествующего уровня техники известны различные способы и устройства для разработки движений и устранения контрактур в различных суставах пассивной лечебной гимнастикой.
Известны способы и устройства для разработки движений в суставах конечностей рук.
Например, известно устройство для разработки движений в локтевом суставе при наличии контрактур, которое содержит шарнирно соединенные элементы крепления, установленные на сегменте конечности в виде шин или опор компрессионно-дистракционого аппарата, кронштейны с тягами, вызывающие циклическое сгибание и разгибание конечности, что создает эффект толчкообразной активной и пассивной нагрузки (патент RU 2106130, опубл. 10.03.1998).
Также известно устройство для устранения контрактур кистевого сустава (патент RU 2152771, опубл. 20.07.2000). На одном конце основания устройства установлены ложемент для предплечья, нагружающий и тормозной механизмы, а на другом конце - шарнирно соединенные ложементы для плеча и локтевого сустава. Устройство позволяет осуществлять активные пронационно-супинационные движения в кистевом суставе с дозированной нагрузкой и фиксацией кисти в достигнутом положении.
Вышеуказанные способы и устройства - узкоспециализированы.
Известны универсальные способы и устройства для разработки движений в различных суставах.
Известно поворотное устройство для разработки движений в лучезапястном, локтевом, коленном и других суставах, содержащее опору, установленную на одной части сустава, шарнирные соединения, дополнительную опору с элементом крепления к другой части сустава, сгибающе-разгибающий механизм (патент RU 2139027, опубл. 10.10.1999). Соединение элементов выполнено с возможностью поворота и поступательного движения друг относительно друга. Устройство обеспечивает постепенное увеличение усилия в широком диапазоне углового отклонения одной части сустава относительно другой.
Известно устройство для восстановления подвижности в суставах конечностей, содержащее электропривод, опорные приспособление для смежных сегментов сустава, устройство управления (патент RU 2139701, опубл. 20.10.1999). Устройство обеспечивает режим пассивных движений в суставах одновременно в двух плоскостях.
Использование известных устройств основано на субъективной оценке задачи угловых отклонений и параметров движения.
В качестве прототипа первого предлагаемого способа выбран способ, используемый в устройстве для разработки коленного сустава, согласно которому фиксируют смежные сегменты, образующие сустав, после чего осуществляют принудительное реверсивное относительное вращение суставных концов вокруг продольной оси голени в заданной области граничных углов в пределах анатомо-физиологических границ сустава путем приложения усилия, развиваемого реверсивным приводом, к голени (SU 1627176, опубл. 15.02.1991). Этот способ узкоспециализирован и малоэффективен, т.к. не оптимизированы кинематические и динамические параметры прилагаемого усилия.
В качестве прототипа второго предлагаемого способа выбран известный способ восстановления функции суставов механотерапией (патент RU 2214211, опубл. 20.10.2003). Способ включает реверсивные относительные угловые движения суставных концов в заданной области граничных углов и скоростей с помощью электропривода при условии движения строго в одной плоскости с обязательной фиксацией сегментов конечностей. Дополнительно измеряют момент сопротивления мышечной реакции пациента вращению электропривода и при условии напряжения мышц, противодействующих движению, осуществляют реверс электропривода. Кроме того, для ускорения восстановления функции сустава скорость движения устанавливают исходя из достижения максимального объема движения. Однако кинематическая энергия, накопленная движущимся сегментом конечности, обуславливает его инерционность, что может привести к болевым ощущениям в крайних точках. Кроме того, использование только сгибательно-разгибательных движений ограничивает область применения способа.
Решаемая техническая задача - расширение функциональных возможностей и оптимизация кинематических и динамических параметров механотерапии для восстановления нарушенной функции суставов.
Предлагается два способа восстановления функции суставов механотерапией, в которых общим с прототипами является то, что для их осуществления фиксируют смежные сегменты, образующие сустав, после чего с помощью реверсивного привода осуществляют принудительные реверсивные относительные движения суставных концов в заданной области граничных углов в пределах анатомо-физиологических границ сустава путем приложения усилия, развиваемого приводом, по крайней мере к одному из смежных сегментов. Согласно первому предлагаемому способу общим с прототипом также является то, что в качестве относительного вращения используют относительное вращение вокруг продольной оси одного из смежных сегментов.
Новым согласно первому способу является то, что относительное вращение осуществляют при заданном крутящем моменте, приложенном по крайней мере к одному из смежных сегментов, при этом крутящий момент задают так, что по крайней мере в конечной стадии относительного вращения он не превышает крутящего момента, при котором возникают болевые ощущения вблизи по крайней мере одного граничного угла.
Реверс привода можно осуществлять после остановки относительного вращения в одну из сторон под действием мышечной реакции, т.е. когда крутящий момент, приложенный к суставу, будет уравновешен крутящим моментом, развиваемым сокращением мышц до возникновения болевого ощущения.
При этом реверс привода лучше осуществлять через заданный интервал времени после остановки, например через 1-10 секунд.
Крутящий момент можно задавать после фиксации смежных сегментов, когда врач или пациент осуществляет вручную несколько циклов реверсивного относительного вращения в пределах анатомо-физиологических границ сустава. При этом реверсивный привод выполнен с возможностью запоминания динамических и кинематических характеристик осуществленных вручную циклов и их последующего воспроизведения уже в автоматическом режиме.
Хотя бы один из смежных сегментов лучше фиксировать так, чтобы оказать давление на область сухожильных окончаний мышц этого сегмента.
В качестве реверсивного привода можно использовать различные приводы (пневматический, гидравлический и т.п.), лучше - реверсивный электропривод.
Относительное вращение можно осуществлять при заданном относительном угловом положении суставных концов.
Относительное вращение также можно осуществлять одновременно с принудительным реверсивным относительным угловым движением суставных концов в заданной плоскости, в заданной области граничных углов.
Новым согласно второму предлагаемому способу является то, что усилие, развиваемое приводом, задают так, что по крайней мере в конечной стадии относительного движения оно не превышает усилия, при котором возникают болевые ощущения вблизи по крайней мере одного граничного угла, при этом ускорение в конечной стадии относительного движения по крайней мере в одну из сторон задают максимальным.
Можно осуществлять принудительное реверсивное относительное угловое движение суставных концов в заданной плоскости.
При этом по крайней мере часть относительного движения в одну из сторон осуществляют под действием силы тяжести, а усилие, развиваемое приводом, направляют в сторону, противоположную направлению движения.
Также можно осуществлять принудительное реверсивное относительное вращение суставных концов вокруг продольной оси одного из смежных сегментов.
При этом относительное вращение можно осуществлять как при заданном угловом положении суставных концов, так и одновременно с принудительным реверсивным относительным угловым движением суставных концов в заданной плоскости в заданной области граничных углов.
Реверс привода можно осуществлять после остановки относительного движения в одну из сторон под действием мышечной реакции.
При этом реверс привода лучше осуществлять через заданный интервал времени после остановки, например через 1-10 секунд.
Усилие, развиваемое приводом, можно задавать после фиксации смежных сегментов, осуществляя вручную несколько циклов реверсивного относительного движения в пределах анатомо-физиологических границ сустава, при этом реверсивный привод должен быть выполнен с возможностью запоминания динамических и кинематических характеристик осуществленных вручную циклов и их последующего автоматического воспроизведения.
Хотя бы один из смежных сегментов лучше фиксировать так, чтобы оказать давление на область сухожильных окончаний мышц этого сегмента.
В качестве реверсивного привода использовать реверсивный электропривод, а также другие приводы.
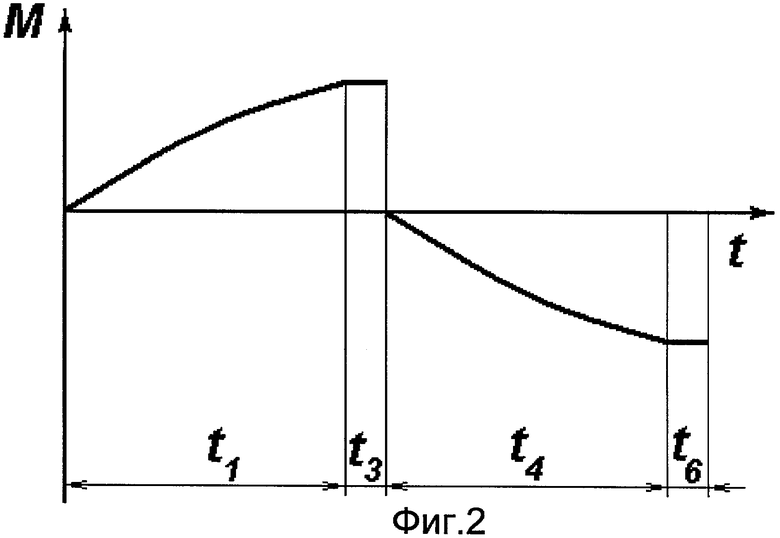
Изобретение поясняется графиками усилий, развиваемых приводом и прилагаемых к предплечью при горизонтальной фиксации плеча для одного цикла нагружений. На фиг.1 представлен график силы F=f(t) при осуществлении угловых движений, а на фиг.2 - график крутящего момента M=f(t) при осуществлении вращательных движений. На графиках также обозначено: t - время, ti - i-ый интервал времени.
Изобретение поясняется на примере восстановления функций локтевого сустава.
Поврежденный локтевой сустав помещают в тренажер, зафиксировав плечо и предплечье на ложементах поворотных частей тренажера, причем плечо фиксируют горизонтально неподвижно в неподвижном ложементе, а предплечье может совершать угловые (и возможно вращательные) движения вместе с подвижным ложементом, соединенным передачей с электроприводом. Фиксация в ложементах осуществляется манжетами, при этом плечо фиксируют вблизи локтевого сустава так, чтобы оказать давление на область сухожильных окончаний мышц плеча вблизи локтевого сустава, что приводит к активации сухожильных рецепторов, вызывая торможение собственной мышцы, в частности бицепса, возбуждая мотонейроны антагониста. Терапевт (или пациент) вручную осуществляет несколько циклов реверсивного углового движения зафиксированным предплечьем относительно неподвижного плеча, устанавливая тем самым допускаемые границы в пределах анатомо-физиологических границ локтевого сустава, необходимые для эффективного лечения плоскость относительного движения, а также скорость движения. При установке скорости движения лучше, когда ускорение в конечной стадии относительного движения хотя бы в одну из сторон было максимальным. При установке также требуется проследить, чтобы усилие по ходу относительного движения не превышало усилия, при котором возникают болевые ощущения, особенно вблизи границ движения. Реверсивный электропривод тренажера выполнен с возможностью запоминания динамических характеристик (например, прикладываемые усилия по времени и/или по ходу траектории) и кинематических характеристик осуществленных вручную циклов и их последующего воспроизведения - это относительно легко может быть осуществлено на современном уровне техники, например с помощью шагового электропривода движения звена подвижного ложемента (циклического углового и/или вращательного), снабженного микроконтроллером. Возможна задача циклических усилий на предплечье в автоматическом режиме. После установки включают электропривод - начинается циклическое принудительное относительное угловое движение плеча и предплечья (сгибание-разгибание) в определенной плоскости. Динамические характеристики движения приведены на фиг.1. На первом этапе движения в интервале времени t1 происходит движение из крайнего нижнего (практически горизонтального) положения предплечья под действием усилия электропривода с преодолением силы веса предплечья. На втором этапе движения в интервале времени t2 происходит дальнейшее движение, однако, усилие электропривода направлено противоположно направлению движения для уравновешивания силы инерции, а также силы веса предплечья после возможного прохождения предплечьем точки, в которой угол его продольной оси с горизонталью составляет более 90°. В конце второго этапа, т.е. вблизи второй границы движения это усилие является максимальным, что определяет максимальное ускорение (торможение) в конце второго этапа. Важным условием является то, чтобы усилие в конце этого этапа было таким, чтобы не вызывать болевые ощущения. В конце второго этапа движение останавливается, т.е. электропривод «проскальзывает» и начинается третий этап, когда относительное движение отсутствует, плечо и предплечье находятся в крайне согнутом положении, при этом на сустав воздействует постоянное усилие, не превышающее допустимого. Лучше когда интервал времени t3 составляет 1-10 с, в это время периферические мышцы находятся в состоянии незначительного статического напряжения, активизируется связочный аппарат локтевого сустава и сухожильной части мышечного волокна в подпороговой зоне миотатического рефлекса в условиях клинической адаптации к новому двигательному акту в обратном направлении. Далее реверсивный электропривод срабатывает и начинается движение в противоположную сторону, где: на четвертом этапе t4 происходит движение из крайнего верхнего положения предплечья под действием усилия электропривода с преодолением силы веса предплечья; на пятом этапе t5 - дальнейшее движение, когда усилие электропривода направлено противоположно направлению движения для уравновешивания силы инерции и силы веса предплечья, а на шестом этапе t6 - статическое воздействие в другом крайнем положении. После этого цикл повторяется. Число циклов повторения (или время числа циклов повторений) устанавливается терапевтом эмпирически в эффективном количестве. Использование вышеописанной схемы повторений угловых относительных движений позволяет эффективно восстанавливать нарушенные функции сустава не только за счет движения в требуемой плоскости, но и за счет статического воздействия на третьем и шестом этапах. Кроме этого, такая схема позволяет упростить конструкцию тренажера путем упрощения конструкции реверса электропривода. Схема повторений вращательных относительных движений (при неподвижном плече и циклическом вращении предплечья вокруг его оси) приведена на фиг.2. Эта схема подобна предыдущей, но она проще - в ней отсутствуют второй и четвертый этапы, т.к. на относительное вращение практически не влияет сила веса. Следует отметить, что принудительное реверсивное относительное вращение можно осуществлять как при заданном фиксированном относительном угловом положении плеча и предплечья, так и одновременно с вышеописанным угловым движением, т.е. когда электропривод и рычажно-шарнирная система тренажера позволяет осуществлять эти два движения одновременно.
Приведенный пример использован только для целей иллюстрации возможности осуществления изобретения и ни в коей мере не ограничивает объем правовой охраны, представленный в формуле изобретения, при этом специалист в данной области техники относительно просто способен осуществить и другие пути осуществления изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВОССТАНОВЛЕНИЯ ФУНКЦИИ СУСТАВОВ МЕХАНОТЕРАПИЕЙ | 2002 |
|
RU2214211C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ДВИГАТЕЛЬНОЙ АКТИВНОСТИ СУСТАВОВ ВЕРХНИХ И НИЖНИХ КОНЕЧНОСТЕЙ ПУТЕМ ПАССИВНОГО ДВИЖЕНИЯ | 2013 |
|
RU2523635C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ФУНКЦИИ СУСТАВОВ МЕХАНОТЕРАПИЕЙ | 2005 |
|
RU2277406C1 |
| Способ лечения центральных сенсомоторных нарушений | 1981 |
|
SU1109177A1 |
| АППАРАТ ДЛЯ ВОССТАНОВЛЕНИЯ ФУНКЦИИ СУСТАВОВ МЕХАНОТЕРАПИЕЙ | 2005 |
|
RU2277894C1 |
| Устройство для разработки подвижности плечевого сустава | 2017 |
|
RU2653811C1 |
| Способ роботизированной механотерапии после реверсивного эндопротезирования плечевого сустава | 2023 |
|
RU2802552C1 |
| СПОСОБ ЛЕЧЕНИЯ ДЕТЕЙ С ПОСЛЕДСТВИЯМИ ТРАВМЫ ВЕРХНИХ И НИЖНИХ КОНЕЧНОСТЕЙ | 2013 |
|
RU2543286C1 |
| Роботизированное устройство тренажера для реабилитации конечностей и способ его применения | 2021 |
|
RU2766754C1 |
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ ФУНКЦИИ СУСТАВОВ МЕХАНОТЕРАПИЕЙ | 2002 |
|
RU2214212C1 |
Изобретение относится к механотерапии. Фиксируют смежные сегменты, образующие сустав. Осуществляют принудительное реверсивное относительное вращение суставных концов вокруг продольной оси одного из смежных сегментов в заданной области граничных углов в пределах анатомо-физиологических границ сустава путем приложения усилия, развиваемого реверсивным приводом, по крайней мере к одному из смежных сегментов. Согласно первому варианту относительное вращение осуществляют при заданном крутящем моменте, приложенном по крайней мере к одному из смежных сегментов. Крутящий момент задают так, что по крайней мере в конечной стадии относительного вращения он не превышает крутящего момента, при котором возникают болевые ощущения вблизи по крайней мере одного граничного угла. Согласно второму варианту усилие задают так, что по крайней мере в конечной стадии относительного движения оно не превышает усилия, при котором возникают болевые ощущения вблизи по крайней мере одного граничного угла. Ускорение в конечной стадии относительного движения в одну из сторон задают максимальным. Изобретение позволяет расширить функциональные возможности и оптимизировать кинематические и динамические параметры механотерапии для восстановления нарушенной функции суставов. 2 н. и 19 з.п. ф-лы, 2 ил.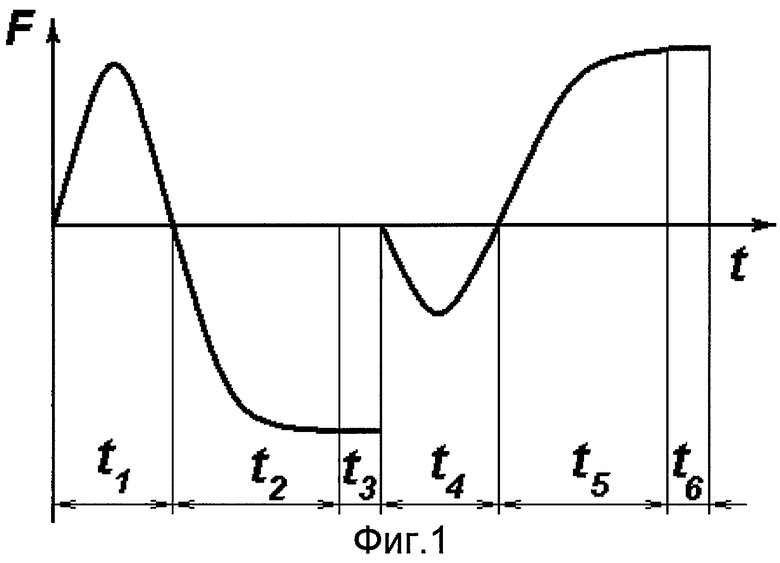
| Устройство для разработки коленного сустава | 1989 |
|
SU1627176A1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ФУНКЦИИ СУСТАВОВ МЕХАНОТЕРАПИЕЙ | 2002 |
|
RU2214211C1 |
| US 4558692 А1, 17.12.1985 | |||
| US 3976057 А, 24.08.1976. | |||

