Изобретение относится к управлению раотой транспортирующих средств и меха} из- ов в заданном режиме и может быть спользовано,в частности, для центрированой остановки и выдачи перемещаемых объеков на транспортно-упаковочных линиях ЦБП.
Целью изобретения является повышение надежности работы и упрощение конструкции устройства.
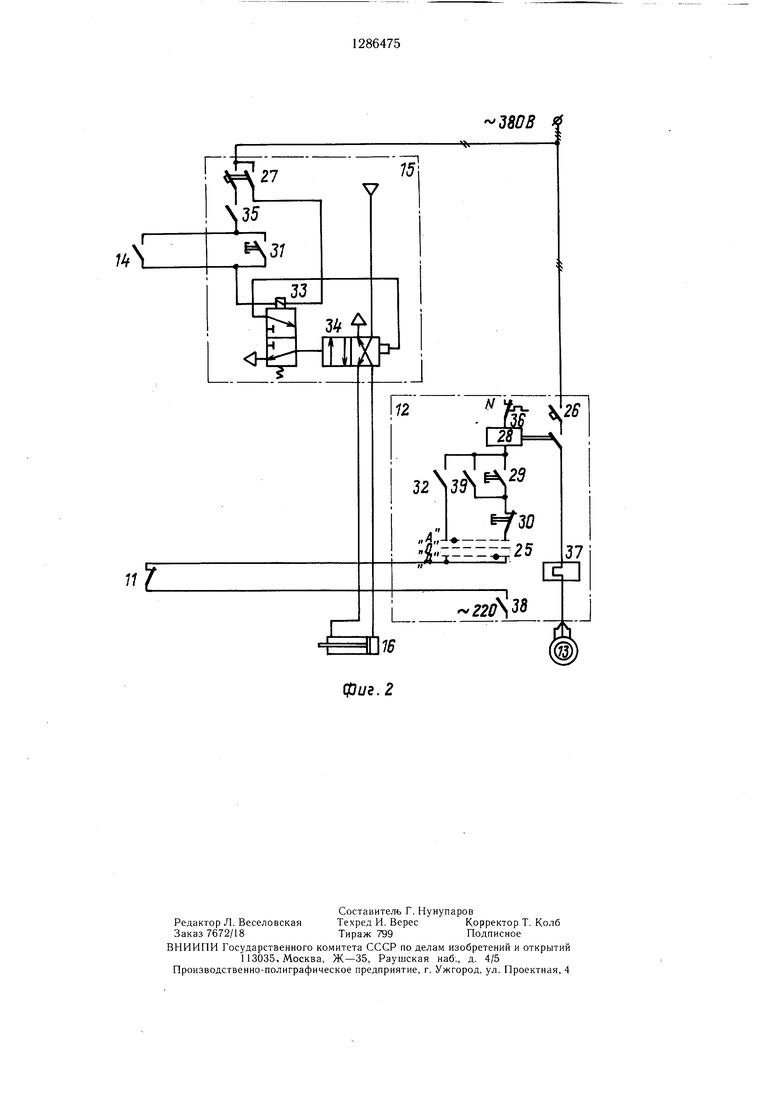
На фиг. 1 изображена функциональная хема устройства; на фиг. 2 - функцинальные схемы блоков управления приводами подающего конвейера и механизма выачи.
Устройство содержит источник 1 стабилизированного постоянного напряжения, зарядную цепь, состоящую из конденсатора 2 и двух последовательно соединенных резисторов 3 и 4 одинакового сопротивления, которые зашунтированы обратно включенным диодом 5, делитель напряжения на резисторах б и 7, подключенный к инвертирующему входу компаратора 8, неинвертирующнй вход которого соединен с зарядным конденсатором 2, выход компаратора 8 соединен с входом выходного усилителя 9, который присоединен к одному концу катушки выходного реле 10, а ее другой конец и выходной усилитель 9 соединены с разными полюсами источника 1 постоянного напряжения, размыкающий контакт 11 реле 10 соединен с блоком 12 управления приводом 13 подающего конвейера, а замыкающий 14 - с блоком 15 управления приводом 16 механизма выдачи, промежуточные реле 17 и 18, катушка реле 17 соединена через замыкающий контакт датчика 19 наличия объекта, например фотореле, с внещним питанием и своим размыкающим контактом 20 шунтирует резистор 4, катушка реле 18 через параллельно соединенные замыкающие контакты 21 и 22 реле 17 и 18 и последовательно соединенный размыкающий контакт датчика 23 фиксации удаления объекта также соединена с внещним источником питания, замыкающий контакт 24 реле 18 расположен в цепи включения источника 1 стабилизированного постоянного напряжения. Блоки 12 и 15 управления включают переключатель 25 режимов работы (А - автоматический, Д - дистационный), автоматические выключатели 26 и 27, магнитный пускатель 28, кнопки 29, 30 и 31 управления, контакт 32 из схемы управления линии, электромагнитную катушку 33, пневмораспре- делитель 34, например, типа В64-2, блокировочный контакт 35 пускателя 28, контакт 36 теплового реле 37, блок-контакт 38 автоматического выключателя 26, блокировочный контакт 39 пускателя 28.
Устройство для автоматического центрирования транспортируемых объектов и их выдачи работает следующим образом.
В исходном положении, как показано на фиг. 1, все элементы схемы обесточены. При работе подающего конвейера от привода 13 через блок 12 управления и поступлении, например, рулона в момент срабатывания датчика фотореле 19 от его передней кромки включается промежуточное реле 17, которое своим размыкающим контактом 20 расшунтирует резистор 4, а замыкающим контактом 21 включает промежуточное
реле 18, которое самоблокируется своим замыкающим контактом 23 и контактом 24 включает источник I стабилизированного постоянного напряжения. На выходе компаратора 8 появляется нулевой сигнал. Этим сигналом выходной усилитель 9 удерживается в нулевом состоянии. Выходное реле 10 обесточено. Сразу же начинается заряд конденсатора 2 через последовательно включенные резисторы 3 и 4, имеющие одинаковые сопротивления. В момент прохождения датчика 19 задним торцом рулона реле 17 обеспечивается и своим размыкающим контактом 20 щунтирует резистор 4. Конденсатор 2 продолжает заряжаться, но в два раза быстрее. Когда напряжение на конденсаторе 2, прямом входе операционного усилителя 8 достигнет уровня опорного напряжения на инверсном входе операционного усилителя 8, снимаемого с делителя напряжения на резисторах 6 и 7, на выходе операционного усилителя 8 появляется положительный сигнал, которым открывается выходной усилитель 9. Выходное реле Ш срабатывает и своим размыкающим контактом II в блоке 12 управления отключает привод 13 подающего конвейера, рулон останав-, ливается на оси центрирования, а замыкающим контактом 14 в блоке управления включает привод 16 механизма выдачи. После срабатывания механизма выдачи размыкается контакт датчика 23 и реле 18 обесточивается. Устройство выключается и приходит в исходное состояние, при этом конденсатор 2 разряжается через диод 5 и ре-1 зисторы 6, и механизм в лдачи возвращается в исходное положение. Устройство готово к приему. После подачи следующего рулона цикл повторяется.
Работа блоков 12 и 15 управления происходит следующим образом.
Переключателем 25 выбирается режим работы подающего конвейера. Автоматическими выключателями подается напряжение на соответствующие блоки 12 и 15. При дистанционном режиме работы управление приводом 13 подающего конвейера осуществляется магнитным пускателем 28 посредством кнопок 29 и 30, при автоматическом режиме - контактом 32. Б обоих режимах цент.- рирование рулона происходит автоматически
в процессе его подачи, и конвейер останавливается при размыкании контакта 11 выходного реле 10. При этом замыкающим контактом 14 включается катушка 33 пневмо
распределителя 34 привода 16 механизма выдачи, например пневмоцилиндра. Происходит рабочий ход - выдача рулона, в конце которого размыкается контакт 23 датчика выдачи. Схема устройства центрирования обесточивается. Контакт 14 размыкается и обесточивает катушку 33, подпором воздуха золотник пневмораспределителя 34 переключается, возвращая шток цилиндра в исходное положение. Контакт 11 замыкается. Таким образом, схема и механизмы готовы к очеред- ному циклу работы. Контакт 35 осуществляет блокировку от включения механизма выдачи при работе подающего конвейера. Обратная блокировка осуществляется через контакты II и 14 реле 10.
Условием нормальной работы устройства при разных линейных размерах объектов являются расположение датчика 19 наличия объекта от оси центрирования со стороны движения на расстоянии, равном немного более половины максимального по длине объ- екта, постоянство скорости подающего транспортера и равенство сопротивлений резисторов 3 и 4. Устройство настраивается на максимальный подлине объект, при этом подбираются сопротивления резисторов 3 и 4, а делителем напряжения на резисторах 6 и 7 устанавливается величина постоянного сигнала на инверсном входе операционного /силителя 8. Все меньшие по длине объек- гы будут центрироваться автоматически.
Использование данного изобретения поз- волит создать компактное и малогабаритное устройство, которое будет удобно для при- .менения.
Использование данного устройства для автоматизации транспортно-упаковочных линий, например, в ЦБП повысит надежность их работы, так как значительно увеличится наработка количества циклов на отказ.
Формула изобретения
Устройство для автоматического центрирования транспортируемых объектов и их
ю
5 . 5
0
0
выдачи, содержащее датчик наличия объекта, расположенных от оси центрирования со стороны движения объекта на расстоянни, равном более половины дпины объекта, датчик фиксации удаления объекта с позиции центрирования, блоки управления приводами подающего конвейера и механизма выдачи, источник стабилизированного постоянного напряжения, делитель напряжения, выходное и два промежуточных реле, зарядный конденсатор с двумя резисторами и диод, ка- . тушка первого промежуточного реле соединена через замкнутый контакт датчика наличия объекта с внешним источником питания, замыкающий контакт этого pejie шунтирует первйй резистор, который через второй резистор соединен с первым выводом зарядного конденсатора, катушка промежуточного реле через параллельно соединенные замыкающие контакты этого реле и первого промежуточного реле и соединенный по следовательно с ними размыкающий контакт датчика фиксации удаления объекта соединена с внешним питанием, размыкающий контакт выходного реле соединен, с блоком управления приводом подающего конвейера, а замыкающий контакт с блоком управления приводом механизма выдачи, отличающееся тем, что, с целью повышения надежности и упрощения конструкции, оно снабжено компаратором на дифференциальном усилителе, инвертирующий вход которого сое динен с делителем напряжения, неинвертиру- ющий вход соединен с первым выводом конденсатора и вторым резистором, второй вывод зарядного конденсатора и первый вывод первого резистора подключены к источнику стабилизированного постоянного напряжения, оба резистора зашунтнрованы обратно включенным по отношению к полярности источника стабилизированного постоянного напряжения диодом, выход компаратора соединен с входом выходного усилителя, который соединен с одним концом катушки выходного реле, а ее другой конец и выходной усилитель подключены к источнику стабилизированного постоянного напряжения.
J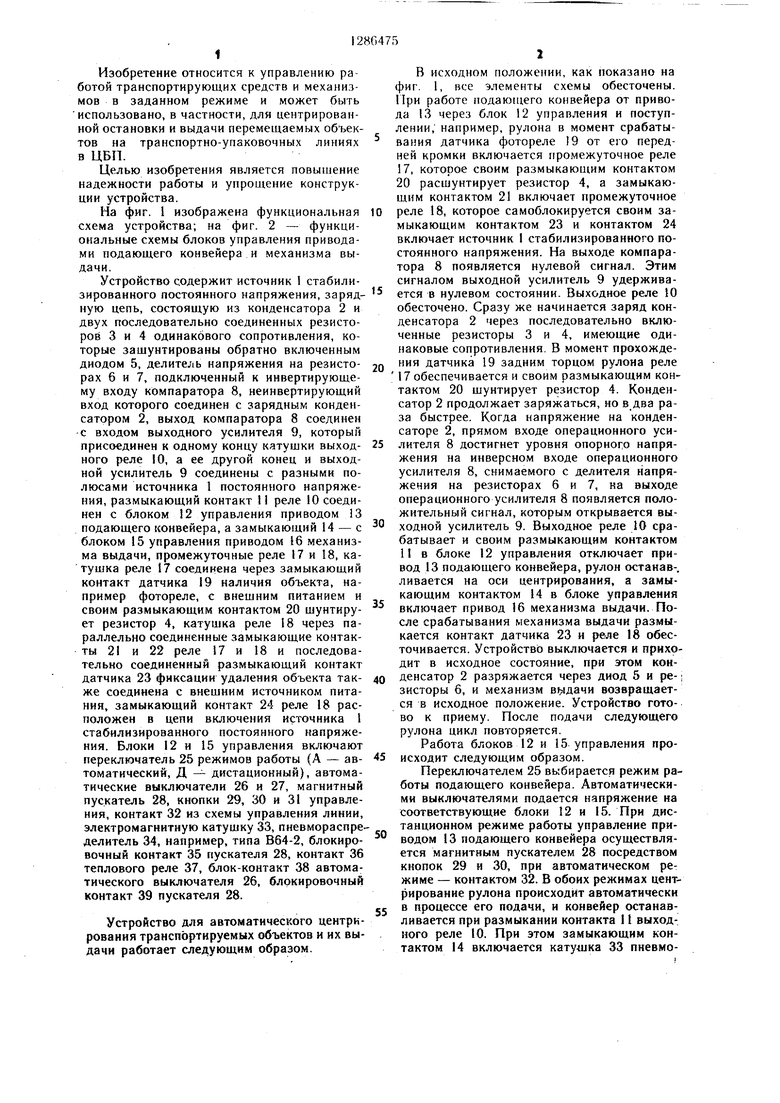
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического центрирования и выдачи транспортируемых объектов | 1984 |
|
SU1193072A1 |
| Устройство дистанционного управления шахтными вентиляторами местного проветривания | 1982 |
|
SU1082965A2 |
| Устройство для отключения электродвигателя конвейера | 1988 |
|
SU1646959A1 |
| УСТРОЙСТВО ДЛЯ ГРУППОВОЙ ОКРАСКИ ДЕТАЛЕЙ | 1972 |
|
SU326987A1 |
| УСТРОЙСТВО для ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ГРУППОЙ ДВУХПОЗИЦИОННЫХ ОБЪЕКТОВ | 1973 |
|
SU368704A1 |
| СХЕМА ЭЛЕКТРИЧЕСКАЯ СТЕНДА ДЛЯ ИСПЫТАНИЯ КОНТАКТОВ МАГНИТНЫХ ПУСКАТЕЛЕЙ НА КОММУТАЦИОННУЮ ИЗНОСОСТОЙКОСТЬ | 2000 |
|
RU2182340C2 |
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ КОМПЛЕКСА КОРАБЕЛЬНОЙ РАДИОЭЛЕКТРОННОЙ АППАРАТУРЫ | 1998 |
|
RU2124260C1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ЭЛЕКТРОДВИГАТЕЛЯ | 2007 |
|
RU2350000C1 |
| Устройство дистанционного управления шахтным вентилятором местного проветривания | 1978 |
|
SU765510A1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ЭЛЕКТРОДВИГАТЕЛЯ | 2007 |
|
RU2350001C1 |
Изобретение предназначено для управления работой транспортирующих средств и механизмов в заданном режиме на транс- портно-упаковочных линиях. Цель изобретения - повышение надежности работы и уп- рош,ение конструкции устр-ва. Оно содержит датчики 19 и 23 наличия объекта и фиксации удаления объекта с позиции центрирования, блоки управления (БУ) 12 и 15 по- даюшего конвейера и механизма выдачи, источник 1 стабилизированного напряжения, делитель напряжения на резисторах (Р) Q н7, подключенный к инвертирующему входу компаратора 8, выходное 10 и два промежуточных 17, 18 реле и зарядную цепь. Она содержит зарядный конденсатор (ЗК) 2 и два последовательно соединенных Р 3 и 4, зашунтированных обратно включенным диодом 5. Датчик 19 расположен на оси центрирования со стороны движения объекта на расстоянии, равном половине длины объекта. Заряд ЗК 2 осуществляется через Р 3 и 4. В момент прохождения датчика 19 задним торцом объекта обесточивается реле 17 и контактом 20 шунтирует Р 4. При напряжении на ЗК 2, равном опорному, на выходе компаратора 8 появится положительный сигнал, открывающий усилитель 9. Сработает реле 10, и БУ 12 отключит привод 13 и включит привод 16. Объект остановится на оси центрирования. Сработает датчик 23, реле 18 обесточится, а ЗК 2 разрядится. 2 ил. 0 1 ГН2Н tTJ 15 а (Л 1C 00 05 4 сл 11 12 Фиг.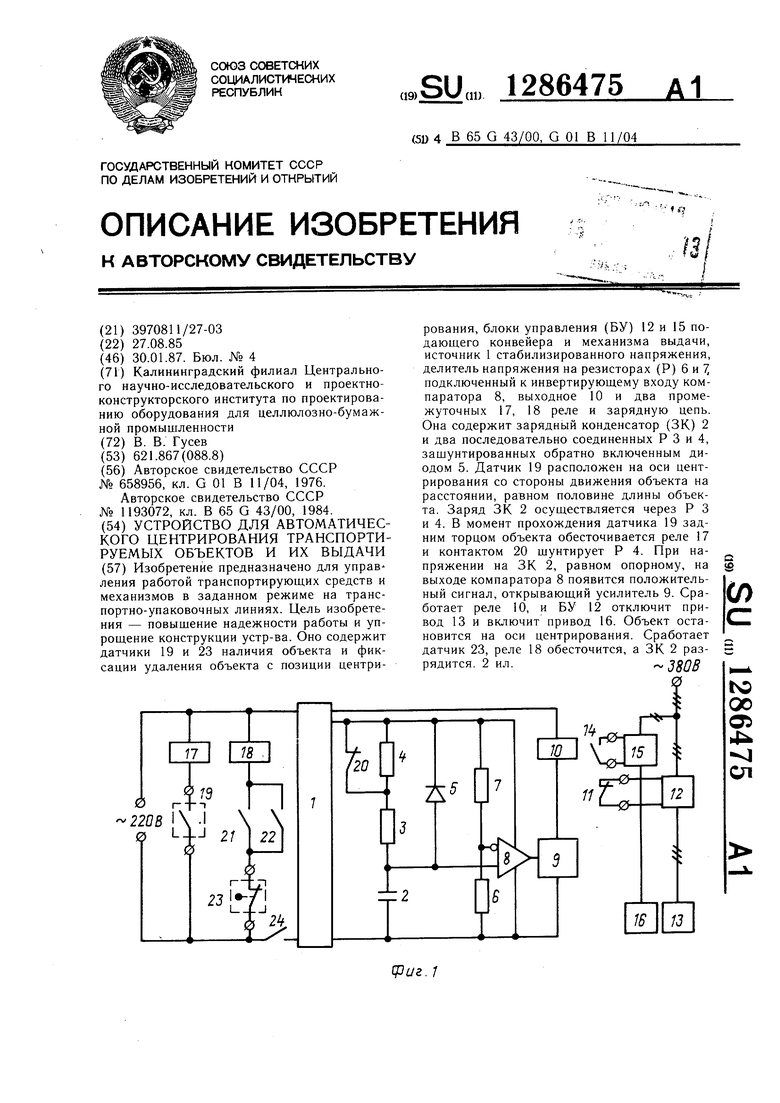
7
n Z i n
ne
..
фиг, 2
L..
220
J
| Авторское свидетельство СССР № 658956, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для автоматического центрирования и выдачи транспортируемых объектов | 1984 |
|
SU1193072A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
