1
Изобретение относится к машиностроению и может быть использовано в качестве вибропривода стендов для динамических испытаний образцов конструкционных материалов, деталей и узлов машин при программном нагру- жении.
Целью изобретения является повышение надежности автоматического регулирования амплитуды колебаний ведомого вала за счет механического исполнения системы автоматического регулирования.
На чертеже представлена схема инерционно-импульсного автоматического импульсатора.
Инерционно-импульсный автоматический импульсатор содержит входной вал 1, установленные на нем основной двигатель 2 и центральное коле со 3 с внешними зубьями. На ведомом валу 4 установлено водило 5, несущее два ряда основных 6 и дополнительных 7 установленных на одних осях сателлитов с неуравновешенными грузами 8 и 9, взаимодействующих с основным 3 и дополнительным 10 центральными колесами с внешними зубьями.
Система автоматического регулирования амплитуды колебаний ведомого вала включает механизм сравнения, уп1)авляющий механизм, датчик обратной связи и задающее звено.
Механизм сравнения и управляющий механизм выполнены в виде двух дифференциальных механизмов с общим водилом 11, установленным свободно . на входном 1 , и коаксиально рас- 20
положенными сателлитами 12 и тральное колесо 14 первого из дифференциальных механизмов кинематически с помощью колес 15 и 16 связано с задающим звеном, выполненным в виде Дополнительного двигателя 17, а центральное колесо 18 - с наружной обоймой 19 механизма свободного хода (мех)..Внутренняя обойма 20 которого жестко связана с водилом 5.
2868602
Вращение основного двигателя 2 передается центральному колесу 3 и сателлитам 6, а, кроме того, через центральные колеса 21, 22 и 10 -
5 сателлитам 7. Числа зубьев перечисленных колес подобраны таким об- , что при неподвижных водилах 11 и 5 сателлиты 6 и 7 вращаются с равными угловыми скоростями и поfO средством сил инерции неуравно ре- шенных грузов 8 и 9 заставляют колебаться водило 5 с амплитудой,зависящей от угловой скорости основного двигателя 2, жесткости испы15 тываемого объекта и угла относительного разворота неуравновешенных грузов 8 и 9. Внутренняя обойма 20 , жестко связанная с водилом 5, при вращении последнего по часовой cfpeil- ке свободно поворачивается, а в обратном направлении - заклинивается, при достижении определенной скорости, с наружной обоймой 19.
Если средняя угловая-скорость последней с учетом передаточного отношения центральных колес 14 и 18 и колес 15 и 16 равна угловой скорости ротора дополнительного двигателя 17, то водило 11 останется неподвиж30 ным и неуравновешенные грузы 8 и-9 сохранят имеющийся угол разворота. Если же амплитуда колебаний водила 5 и выходного вала 4 изменится, например уменьиштся, то уменьшится и
25 максимальная угловая скорость води- .ла 5 и обоймы 19 мех, что приведет к вращению водила 1 до тех пор, пока угол разворота неуравновешенных грузов 8 и 9 не уменьшится до нужной 13. Цен-40 величины и амплитуда колебаний водила. 5 не достигнет первоначального значения. При этом водило 11 остано25
вится. I
Для принудительного изменения ам. 5 плитуды колебаний водила 5 необходимо изменить угловую скорость дополнительного двигателя 17 и тем самым скорость наружной обоймы 19 МСХ. Поскольку вращению неуравновешенных саМСХ выполняет функцию датчика обрат- 50 ,теллитов свойственна самосинхронизаной связи.
Центральные колеса 21 и 22 второ-. го дифференциального механизма жестко связаны соответственно с входным валом 1 и дополнительным централь- , ным колесом 10.
Инерционно-импульсный автоматический импульсатор работает следующим образом.
ция под действием колебаний водила 5, т.е. стремление к уменьшению относительно угла разворота неуравнове шенных грузов, что приводит к увели- 55 чению амплитуды колебаний водила 5, то последняя полностью зависит от заданной угловой скорости обоймы 19.
Таким образом, автоматическая сис тема регулирования с механической
вится. I
Для принудительного изменения плитуды колебаний водила 5 необходимо изменить угловую скорость дополнительного двигателя 17 и тем самым скорость наружной обоймы 19 МСХ. Поскольку вращению неуравновешенных сация под действием колебаний водила 5, т.е. стремление к уменьшению относительно угла разворота неуравновешенных грузов, что приводит к увели- 55 чению амплитуды колебаний водила 5, то последняя полностью зависит от заданной угловой скорости обоймы 19.
Таким образом, автоматическая система регулирования с механической
обратной связью осуществляет слежение амплитуды колебаний ведомого звена за величиной угловой скорости дополнительного двигателя 17, являклце- гося задатчиком величины этой амплитуды.
Формула изобретения
Инерционно-импульсный автоматический импульсатор, содержащий входной вал, установленные на нем основной двигатель и центральное колесо с внешними зубьями, ведомый вал, установленное на нем водило с сателлитами, несущими неуравновешенные грузы, и систему автоматического регулирования, включающую механизм сравнения, управляюп ий механизм, датчик обратной связи и задающее звено, отличающийся тем, что, с целью повьш1ения надежности автоМа- .тического регулирования амплитуды коРедактор М,Бандура Заказ 7700/37
Составитель В.Апархов Техред Л.Сердюкова
Корректор
Тираж 811Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035,, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4,
лебания ведомого ёала, импульсатор снабжен дополнительным центральным колесом с внешними зубьями, зацепляющимися с ним сателлитами с неурав- i
новешенными грузами, установленными на одних осях с основными сателлитами, задающее звено вьшолнено в виде дополнительного двигателя, датчик обратной связи - в виде механизма свободного хода, внутренняя обойма которого связана с водилом, а механизм сравнения и управляющий механизм выполнены в виде двух дифференциальных механизмов с общим водилом,
устано.вленным свободно на входном валу, центральные колеса первого из . которых кинематически связаны соот- ветственно с дополнигельньм двигателем и с наружной обоймой механизма свободного хода, а центральные колеса второго жестко связаны соответственно с входным валом и дополнительным центральньи колесом.
Корректор Е. Сирохман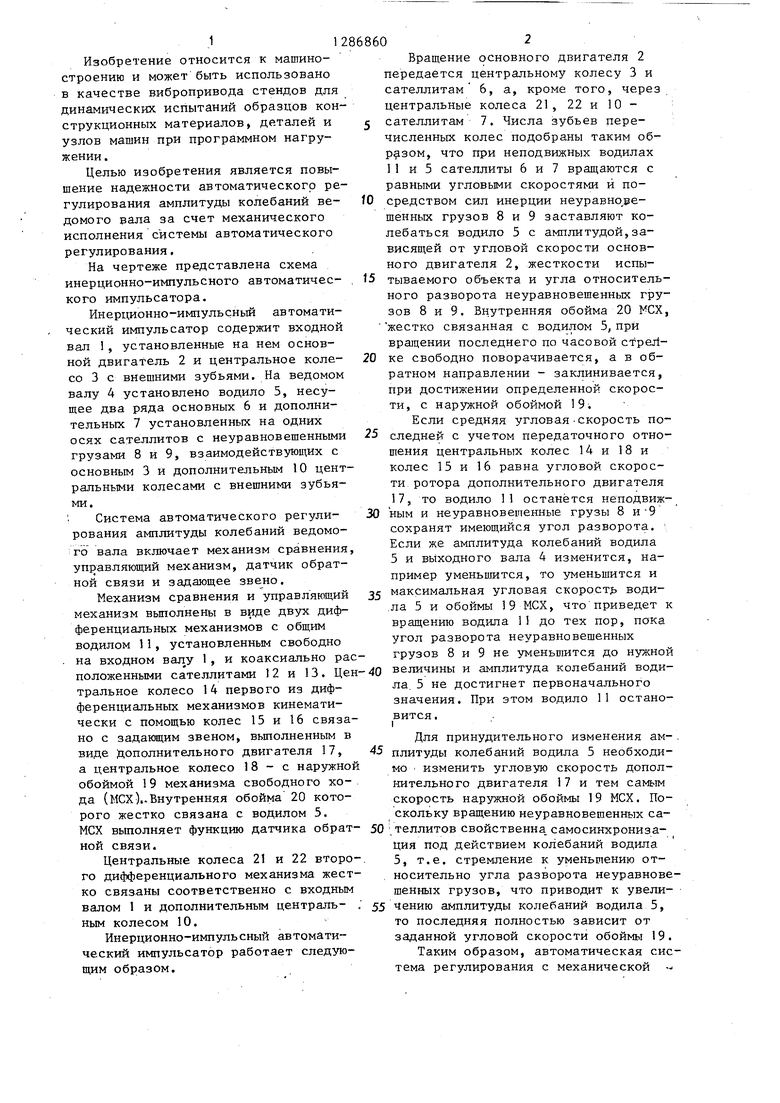
| название | год | авторы | номер документа |
|---|---|---|---|
| Инерционный трансформатор вращающего момента | 1990 |
|
SU1820105A1 |
| ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА ШАШКИНА | 1992 |
|
RU2073804C1 |
| БЕЗИНЕРЦИОННЫЙ ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА ШАШКИНА | 1992 |
|
RU2073805C1 |
| Инерционный трансформатор вращающего момента | 1990 |
|
SU1820104A1 |
| Инерционный трансформатор вращающего момента | 1989 |
|
SU1824506A1 |
| Буровой станок | 1987 |
|
SU1504322A2 |
| Питатель к экструдеру | 1980 |
|
SU926875A1 |
| Инерционно-импульсная передача | 1989 |
|
SU1739151A1 |
| Автоматический импульсный вариатор скорости | 1976 |
|
SU741011A1 |
| Буровой станок | 1981 |
|
SU1004596A1 |
Изобретение относится к машиностроению. Целью изобретения является повышение надежности автоматического регулирования ведомого вала за счет механического исполнения системы регулирования. Принцип работы импульсатора основан на явлении синхронизации неуравновешенных грузов 8 и 9, установленных на ос- новном 6 и дополнительном 7 сателлитах под действием колебаний водила 5, связанного с ведомьм валом 4. Последний жестко связан через вс5йи- ло 5 с внутренней обоймой 20 муфты свободного хода (МСХ), являющейся датчиком обратной связи. Наружная обойма 19 МСХ является датчиком амплитуды колебаний. Дополнительный двигатель 17 - задающее звено, величины этой амплитуды. В качестве механизма сравнения использован дифференциальный механизм, поворот центрального колеса 18 которого посредством второго дифференциального механизма, являющегося управляющим, заставляет разворачиваться неуравновешенные грузы 8 и 9 на осях водила 5, изменяя в нужную сторону амплитуду его колебаний. 1 ил. с (Л
| Инерционный трансформатор вращающего момента | 1977 |
|
SU643692A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Инерционно-импульсное устройство | 1976 |
|
SU630473A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
