Изобретение относится к горной промышленности, а именно к устройствам управления подачей буровых станков шпиндельного типа.
Цель изобретения- повышение надежности за счет устранения перекосов буровой каретки в направляюш,их мачты.
На чертеже представлена блок-схема устройства.
Устройство содержит механизм 1 подачи с канатно-полиспастной системой, буровой кареткой 2 и приводами 3 и 4 подачи, задат- чик 5 скорости подачи, два датчика 6 и 7 скорости приводов подачи, два элемента 8 и 9 сравнения по скорости подачи, два регулятора 10 и 11 скорости подачи, два элемен- та 12 и 13 сравнения по нагрузке, два датчика 14 и 15 нагрузки, два регулятора 16 и 17 нагрузки, два тиристорных преобразователя 18 и 19, два датчика 20 и 21 пути, установленные на концах буро- вой каретки 2, делитель 22, дифференциатор 23, вычитатель 24 и коммутатор 25.
Входы делителя 22 соединены с датчиками 20 и 21 пути, а выход делителя 22 соединен с входом дифференциатора 23, выход которого соединен с одним из входов ком- мутатора 25, второй вход которого соединен с выходом вычитателя 24, входы которого соединены с выходами датчиков 20 и 21 пути. Выходы коммутатора 25, в состав которого входят инвертор и поляризованное реле с двумя парами переключающихся контак- тов, соединены соответственно с третьими входами элементов 8 и 9 сравнения. К вторым входам элементов 8 и 9 сравнения подключен выход задатчика 5 скорости подачи, к первым входам элементов 8 и 9 сравнения подключены выходы датчиков 6 и 7 скорости приводов подачи. Выходы регуляторов 10 и 11 скорости подачи подключены к соответствующим первым выходам элементов 12 и 13 сравнения по нагрузке, к вторым входам которых подключены выходы датчиков 14 и 15 нагрузки. Выходы регуляторов 16 и 17 нагрузки подключены к входам соответствуюш,их тиристорных преобразователей 18 и 19.
Устройство работает следуюш.им образом.
При подаче питания на тиристорные преобразователи 18 и 19 и сигнала с задатчика 5 скорости подачи на вторые входы элементов 8 и 9 сравнения по скорости подачи на выходе тиристорных преобразователей 18 и 19 появляется напряжение и приводы 3 и 4 начинают вращаться, приводя Б движение через механизм 1 подачи буровую каретку 2. По мере нарастания скорости приводов 3 и 4 подачи на первые входы элементов 8 и 9 сравнения по скорости подачи поступают сигналы обратной связи с датчиков 6 и 7 скорости приводов подачи. Сигналы датчиков 6 и 7 скорости приводов подачи обеспечивают требуемую
жесткость механических характеристик привода подачи, благодаря чему скорость приводов поддержив-ается постоянной в установленных пределах изменения нагрузки. Сигналы с датчиков 20 и 21 пути отражают реально пройденный путь буровой каретки 2 в каждой направляющей. В случае возникновения перекоса из-за внещних возмущений, что имеет место при больших скоростях в режиме спускоподъемных операций, сигналы с выходов датчиков 20 и 21 различны. При этом на выходе делителя 22 появляется сигнал, который после дифференцирования в дифференциаторе 23 подается на коммутатор 25, куда подается также на другой вход сигнал алгебраической разности пройденных путей с вычитателя 24. При этом коммутатор 25 выделяет знакопеременные сигналы, которые поступают на третьи входы элементов 8 и 9 сравнения. На входе регуляторов 10 и 11 скорости каждого привода формируется управляющее напряжение, в состав которого входит сигнал скорости изменения отношения сигналов пути, по следующему алгоритму:
и KOC.-WA - -gj
.S 82
icg
и.
AS,
где Uy - напряжение на входе регулятора скорости (на выходе элементов 8 и 9 сравнения;
Us - задающее напряжение (с задатчика 5 скорости подачи);
- сигнал с выхода соответствующего датчика 6 или 7 скорости привода подачи;
Д5 -алгебраическая разность сигналов пути, проходимых противоположными концами буровой каретки 2; AS Si-82, где Si, S2 - соответствующие сигналы с выходов датчиков 20 или 21 пути}
Кос - коэффициент усиления соответствующего датчика 6 или 7 скорости привода подачи; сод - скорость привода подачи. В зависимости от знака сигнала AS с выхода вычитателя 24, изменяется знак выходных сигналов коммутатора 25. Так, если сигнал с первого датчика 20 пути первого привода оказывается больше сигнала с втр- рого датчика 21 пути второго привода, т.е. Si S2, то на входе первого регулятора 10 скорости подачи первого привода управляющий сигнал равен
U| УЗ- Кос сод,- --тГ
1.L
S2
что соответствует уменьшению скорости первого привода.
Для второго привода управляюший сигнал на входе второго регулятора 11 скорости подачи равен
U2 УЗ- Кос(0д,+ Si , с-
09 I
ЧТО соответствует увеличению его скорости.
В случае, когда S2 Si, сигналы с выхода коммутатора 25 действуют в противоположном направлении. Действие этих сигналов прекращается при достижении равенства сигналов с выходов датчиков 20 и 21 пути.
Таким образом, происходит автоматиче- ское выравнивание буровой каретки в направляющих в процессе ее перемещения.
Регуляторы 10 и 11 скорости подачи, а также регуляторы 16 и 17 нагрузки (тока) выполнены пропорционально-интегральными, что позволяет скомпенсировать электромеханическую и электромагнитную постоянные времени электроприводов подачи.
Применение устройства позволит повысить надежность работы бурового станка за счет исключения поломок буровой каретки из-за ее перекосов в направляющих в процессе перемещения.
Формула изобретения
Устройство автоматического управления буровой мащиной, содержащее первый датчик скорости привода подачи и датчик скорости подачи, выходы которых подключены к первому и второму входам первого элемента сравнения по скорости подачи, выход которого через первый регулятор скорости подачи соединен с первым входом первого элемента сравнения по нагрузке, выход первого датчика нагрузки соединен с вто0
0
5
5
0
рым входом первого элемента сравнения по нагрузке, выход которого через первый регулятор нагрузки соединен с первым ти- ристорным преобразователем, отличающееся тем, что, с целью повыщения надежности за счет устранения перекосов буровой каретки в направляющих мачты, устройство снабжено двумя датчиками пути, вторым элементом сравнения по скорости подачи, регулятором скорости подачи, элементом сравнения по нагрузке, регулятором нагрузки, датчиком нагрузки и тиристор- ным преобразователем, а также делителем, дифференциатором, вычитателем и коммутатором, при этом выход второго датчика скорости привода подачи соединен с первым входом второго элемента сравнения по скорости подачи, выход задатчика скорости подачи подключен к второму входу второго элемента сравнения по скорости подачи, выход которого через второй регулятор скорости подачи соединен с первым входом втор ого элемента сравнения по нагрузке, выход второго датчика нагрузки соединен с вторым входом второго элемента сравнения по нагрузке, выход которого через второй регулятор нагрузки соединен с вторым тиристорным преобразователем, причем выходы первого и второго датчиков пути подключены к соответствующим входам вычитателя и делителя, выход которого через дифференциатор соединен с первым входом коммутатора, а выход вычитателя подключен к второму входу коммутатора, первый и второй выходы которого соединены с третьими входами соответствующих элементов сравнения по скорости подачи.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛЯТОР ПОДАЧИ БУРОВОГО ИНСТРУМЕНТА | 1991 |
|
RU2013531C1 |
| Фотоимпульсный измеритель размеров объектов | 1990 |
|
SU1744464A1 |
| Устройство для управления преобразователем частоты | 1988 |
|
SU1629953A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ДУГИ | 1992 |
|
RU2046555C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Преобразователь частоты | 1984 |
|
SU1275711A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2175120C2 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Устройство автоматического управления горной машиной | 1978 |
|
SU935615A1 |
| Регулятор подачи долота | 1986 |
|
SU1416676A1 |
Изобретение относится к горной промышленности и позволяет повысить надежность управления механизмом 1 подачи бурового станка за счет устранения перекосов буровой каретки (БК) 2 в направляю- мачты. Устройство содержит две системы подчиненного регулирования скорости приводов 3 и 4 подачи. Каждая из систем имеет тиристорный преобразователь 18, 19, датчики нагрузки 14, 15 и скорости 6, Т, регуляторы нагрузки 16, 17 и скорости 10, 11 и элементы сравнения (ЭС) по нагрузке 12, 13 и по скорости 8, 9. На концах БК 2 уустановлены датчики 20 и 21 пути, подключенные через делитель 22, дифференциатор 23 и вычитатель 24 к коммутатору 25. К ЭС 8 и 9 подключен выход задатчика 5 скорости. При возникновении перекоса БК 2 сигналы с выходов датчиков 20 и 21 различны. На выходе коммутатора 25 появляются знакопеременные сигналы, которые поступают на ЭС 8 и 9 и через регуляторы 10, 16 и 11, 17 воздействуют на приводы 3 и 4, устраняя перекос БК 2. 1 ил. i Л N5 00 00 ю дэ 00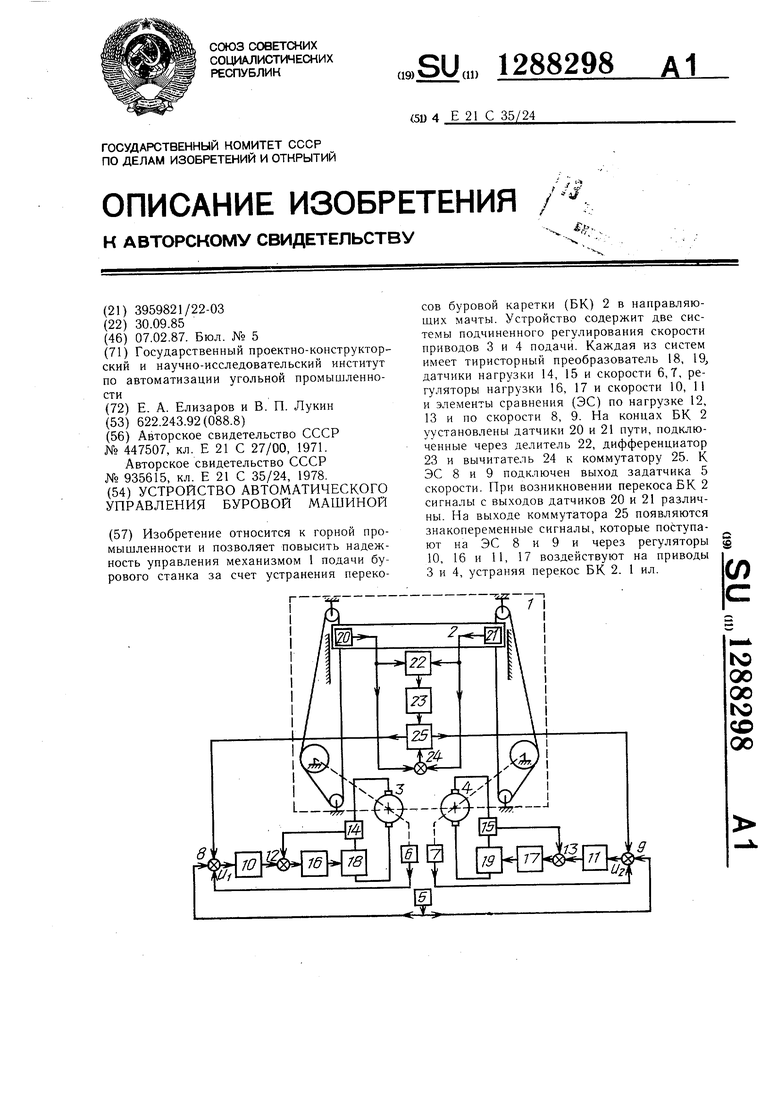
| Способ автоматического управления выемочной машиной | 1971 |
|
SU447507A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство автоматического управления горной машиной | 1978 |
|
SU935615A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
