Изобретение относится к приемки- кам сейсмических колебаний и может найти применение в геофизике.
Целью изобретения является повышение надежности регулирования и снижение относительного поперечного размера сейсмоприемника, а также обеспечение возможности дистанционного регулирования собственной частоты.
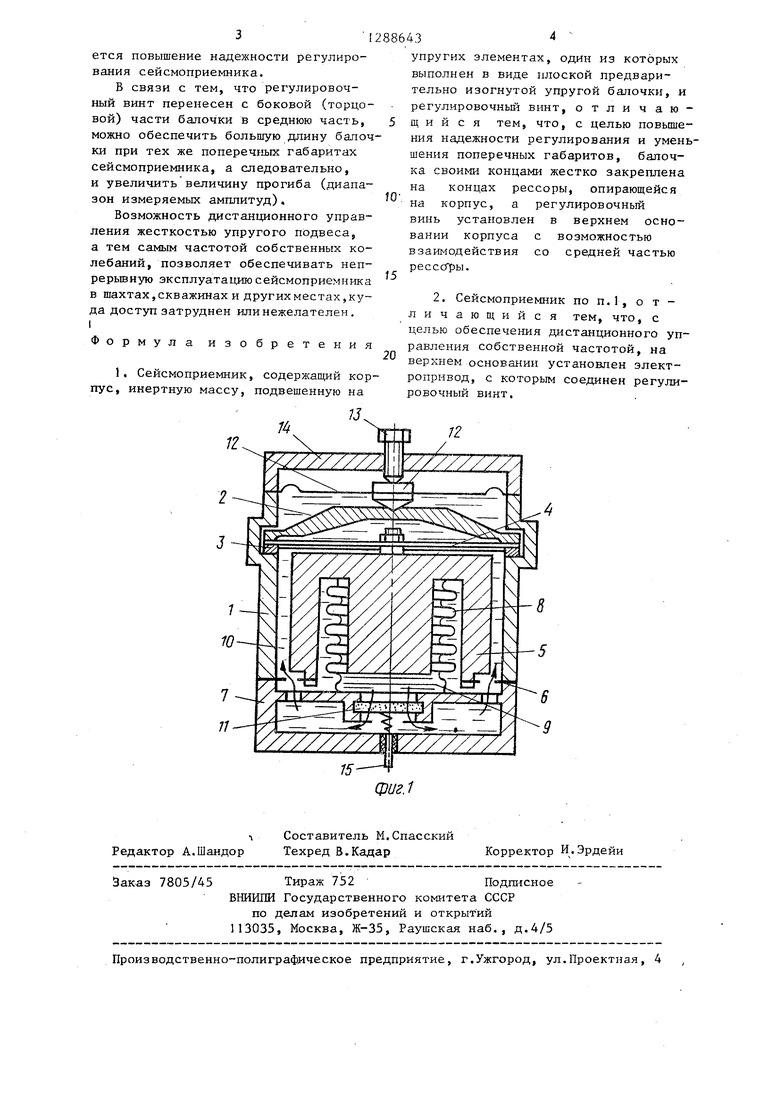
На фиг.1 схематически изображен сейсмоприемник, продольный разрез; на фиг.2 - сейсмоприемник с приводом.
Б качестве примера устройство сейсмоприемника показано с первичным преобразователем колебаний в. электрический сигнал электрокинетического типа.
Сейсмоприемник состоит из корпуса 1 , в котором установлен регули- руемьш элемент, выполненный в виде рессоры 2 с жестко закрепленной на концах с помощью прижимных пластин 3 плоской предварительно изогнутой упругой балочкой 4 К средней части упругой балочки 4 крепится инертная масса 5, а для предотвращения ее перемещения в горизонтальной плоскости нижняя часть установлена на ирисовой пружине 6. Между основанием 7 и инертной массой 5 установлен сил фон 8, Внутренняя полость 9 сильфо- на отделена от наружной полости 10 преобразующей пористой перегородкой 11, при этом обе полости заполняютс полярной жидкостью, например ацетоном. Сверху от окружающей среды полость 10 отделена мембраной 12 оснащенной жестким центром 12.. Регулировочный винт 13 установлен в верк- нем основании 14. Электрический сигнал с преобразующей пористой перегородки 11 снимается токосъемом 15.На верхнем основании 14 (фиг,2) установлен электропривод; выполненный в виде электродвигателя 16 с редук тором 17 и ходовым регулировочным
винтом 18.
1
В качестве привода может быть применен гидро-(пневмо-)цилиндр или термопривод.
Перед проведением измерений производят настройку упругого подвеса в который входят все упругие элементы, а именно: упругая балочка 4,ирисовая пр ужина 6 и сильфон 8.
5
0
Настройка осуществляется следующим образом.
Вращением вручную винта 13 или дистанционно винта 18 редуктором 17 от электродвигателя 16 через жесткий центр 2 осуществляют изменение прогиба рессоры 2, а тем самым изменение ее длины пролета и одновременно балочки 4. При этом х есткость балочки 4, а следовательно,, суммарная жесткость всего упругого подвеса изменяется. Изменение этой жесткости оценивается по изменению собственной (резонансной) частоты колебаний.
В режиме измерений сейсмоприемник работает следующим образом.
Под действием вертикальных ускорений, действующих на сейсмоприемник j инертная масса 5 перемещается вверх или вниз 8 при .этом полярная рабочая жидкость, заключенная в по- .лости 9, проталкивается через пористую преобразующую перегородку 1 1,, возникающая при этом процессе на ее торцах разность потенциалов снимается токосъемом 15.. Величина разности потенциалов пропорциональна величине ускорения, а частота изменения полярности соответствует частоте изменений ускорения.
В случае эксплуатации сейсмопри- емкика в течение длительного времени, когда из-за усталостных напря- же ний или в случае необходимости перенастройкрз сейсмоприемника на другую резонансную частоту в условиях труднодоступных5 например в скважине или шахте,, изменение жесткости,, а следовательно, и собственной частоты колебаний осуществляют подачей электрического сигнала на электродвигатель 16э который через редуктор 17 ХОДОВЫМ регулировочным винтом 18 из- менит жесткость балочки 4. На фиг.1 стрелками показано перетекание жидкости из полости 9 в полость 10 при перемещении инертной массы 5 вниз.
5
5
0
В связи с тем, что рессора 2 с бзлочкой 4 свободно опирается на корпус 1, а все нежелательные люфты выбираются винтом 13 (или 18), что позволяет повысить достоверность регистируемых, колебаний, и в связи с тем, что деформирование рессоры 2 может быть осуществлено плавно, без рьшков, тем самым охватывается весь ,циапазон регулирования. Таким образом достигается повышение надежности регулирования сейсмоприемника.
Б связи с тем, что регулировочный винт перенесен с боковой (торцовой) части балочки в среднюю часть, можно обеспечить большую длину балочки при тех же поперечных габаритах сейсноприемника, а следовательно, и увеличить величину прогиба (диапазон измеряемых амплитуд).
Возможность дистанционного управления жесткостью упругого подвеса, а тем самым частотой собственных колебаний, позволяет обеспечивать неп- рерьюную эксплуатацию сейсмоприемника в шахтах,скважинах и других местах,куда доступ затруднен или нежелателен. I Формула изобретения
1. Сейсмоприемник, содержащий корпус, инертную массу, подвешенную на
7J 1U 12
88643
упругих элементах, один из которых выполнен в виде плоской предварительно изогнутой упругой балочки, и регулировочный винт, отличающийся тем, что, с целью повышения надежности регулирования и уменьшения поперечных габаритов, балоч- ка своими концами жестко закреплена на концах рессоры, опирающейся
1015
20
на корпус, а регулировочный винь установлен в верхнем основании корпуса с возможностью взаимодействия со средней частью ресссГры.
2. Сейсмоприемник по п.1, о т - личающийся тем, что, с целью обеспечения дистанционного управления собственной частотой, на верхнем основании установлен злект- ропривод, с которым соединен регулировочный винт.
J2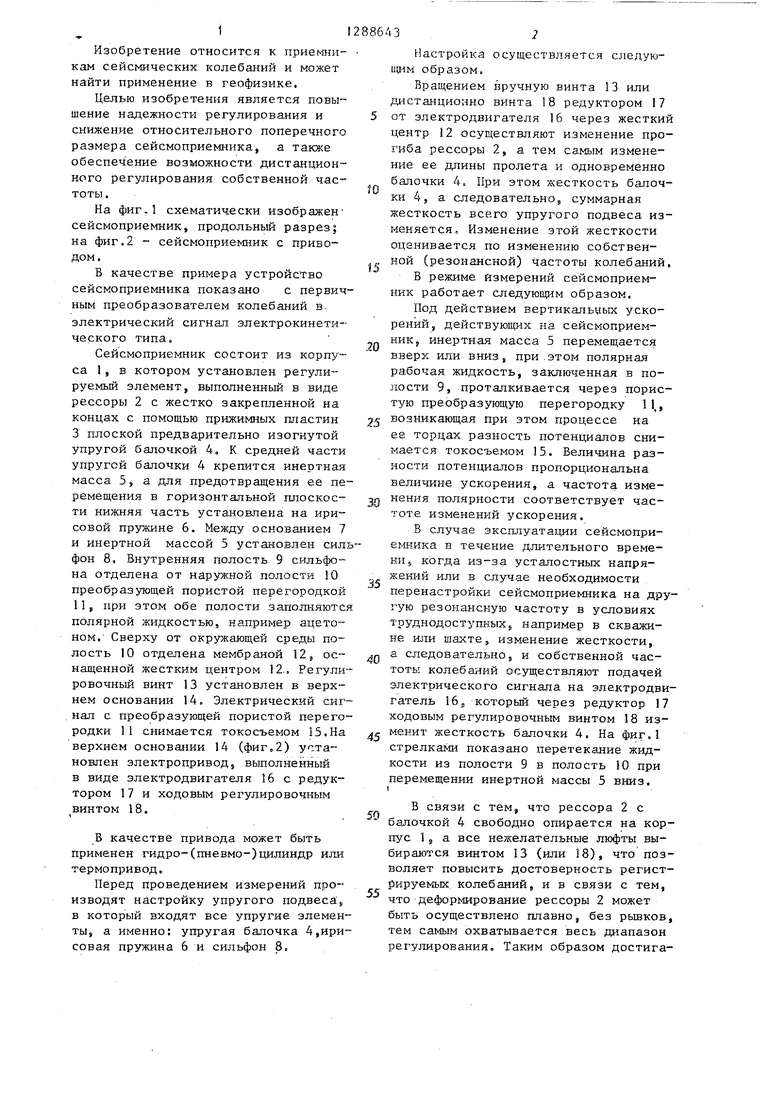
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЙСМОПРИЕМНИК | 1971 |
|
SU322742A1 |
| Сейсмоприемник | 1981 |
|
SU1035546A2 |
| Сейсмоприемник | 1987 |
|
SU1509771A1 |
| Электродинамический сейсмоприемник | 1979 |
|
SU918915A1 |
| Электродинамический сейсмоприемник | 1982 |
|
SU1056105A1 |
| Способ регулирования жесткости ирисовой пружины | 1985 |
|
SU1308970A1 |
| Сейсмоприемник | 1982 |
|
SU1056104A1 |
| Устройство для установки низкочастотных сейсмоприемников и проверки их параметров | 1975 |
|
SU601644A1 |
| Устройство для регулирования жесткостиупРугОй пОдВЕСКи иНЕРциОННОй МАССыСЕйСМОпРиЕМНиКА | 1978 |
|
SU842673A1 |
| Сейсмоприемник | 1974 |
|
SU575592A1 |
Изобретение относится к приемникам сейсмических колебаний и может найти применение в геофизике, Целью изобретения является повышение надежности регулирования и снижение поперечного размера сейсмопри- емника, а также обеспечение возможности дистанционного регулирования собственной частоты. Указанная цель достигается применением в качестве подвеса упругой плоской предварительно изогнутой балочки 4, укрепленной на концах посредством рессоры 2. Изгиб рессоры 2 может регулироваться винтом 13. Для обеспечения дистанционного регулировашия сейсмо- приемник снабжен дополнительно установленным на верхнем основании электроприводом. Изменение изгиба рессоры 2 приводит к изменению бокового давления на балочку 4. Это приводит к изменению жесткости и, следовательно, к управлению собственной частотой сейсмоприемника. 1 з.п. ф-лы, 2 ил. S (Л П . т to оо 00 05 4 СО фиг. 2
Редактор А.Шандор
Составитель М.Спасский Техред В.Кадар
Заказ 7805/45 Тираж 752Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул,Проектная, 4
Корректор И.Эрдейи
| УПРУГАЯ ПОДВЕСКА ИНЕРЦИОННОЙ МАССЫ СЕЙСМОДАТЧИКА | 0 |
|
SU310208A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СЕЙСМОПРИЕМНИК | 0 |
|
SU322742A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
