Изобретение относится к сейсмическим датчикам (вибро.метрам).
Известна пружинно-маятниковая конструкция упругой подвески инерционной массы сейсмографа, которая, в целях снижения частоты собственных колебаний, снабжена дополнительной пружиной, обеспечивающей наличие отрицательной жесткости, работающей параллельно с обычной пружиной.
Однако подвеска такой конструкции имеет сильную паразитную чувствительность к угловым колебаниям вокруг оси, проходящей через точку подвеса маятника перпендикулярно плоскости колебаний системы. Это ограничивает область применения вибродатчиков с такой подвеской только измерениями строго поступательных колебаний. Известное устройство, создающее отрицательную жесткость, вызывает дополнительные напряжелия в элементах упругого подвеса, поэтому его применение для другого типа подвеса (не маятникового), например, в сочетании с плоскими пружинами весьма затруднительно, а подчас и невозможно.
Цель изобретения - повысить чувствительность упругой подвески к измеряемым компонентам колебаний и устранить паразитную чувствительность к измеряемым компонентам колебаний. Это достигается тем, что дополнительный упругий элемент выполнен в
виде нескольких пар стержней, щарнирно связанных с инерционной массой и поджатых пружинами.
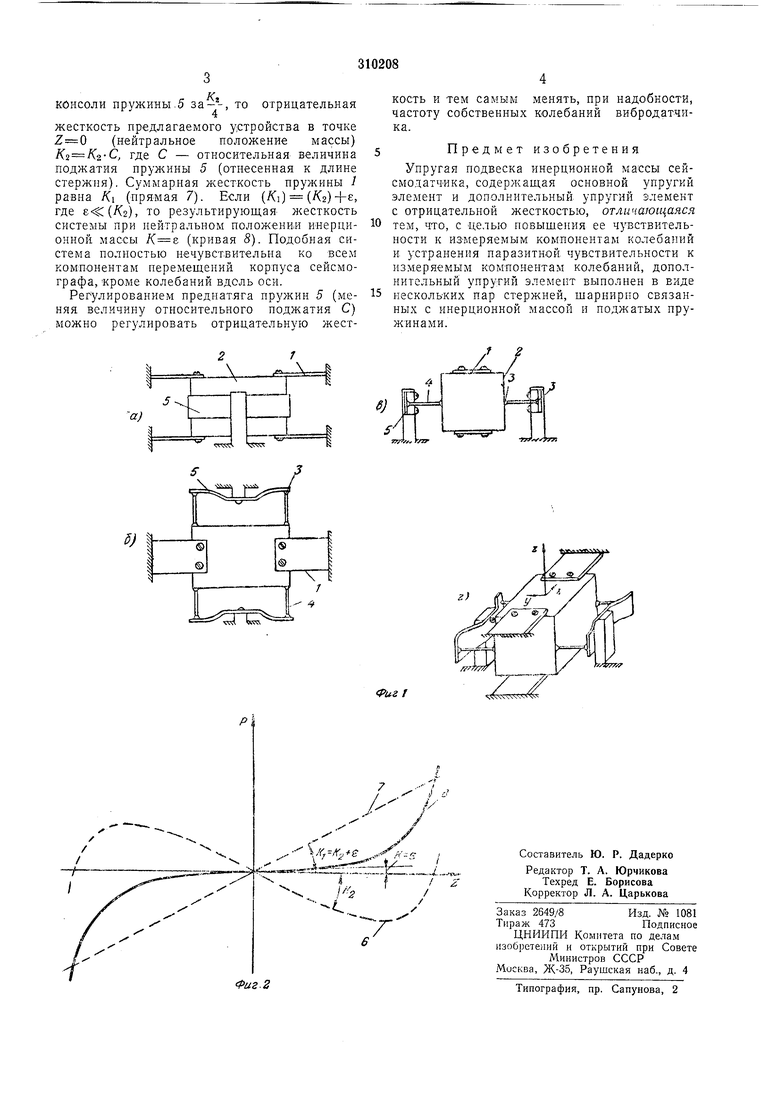
На фиг. 1 изображено предлагаемое устройство в трех проекциях (а, бив) ив аксонометрии (г); на фиг. 2 показан график зависи.мости выталкивающей силы от перемещения по оси Z.
Система из четырех пластинчатых пружин / ограничивает подвижность массы 2, позволяя ей смещаться только вдоль оси Z, в направлении которой они создают в некотором диапазоне перемещений положительную упругость. Кроме того, к массе 2 с помощью
упругих щарниров 3 попарно присоединены стержни 4, поджатые пружинами 5. Если стержни находятся на одной прямой, то усилия, действующие вдоль стержней из-за поджатия пружины 5 к массе, взаимно уничтожаются, и результирующая сила равна нулю. Однако при смещении массы от положения равновесия вдоль оси Z между стержнями образуется угол, отличный от 180°, и реакции со стороны стержней на массу дают
составляющую вдоль оси Z, отличную от нуля. Иа фиг. 2 показан график зависимости этой «выталкивающей снлы от перемещения вдоль оси Z (кривая 6). Если принять 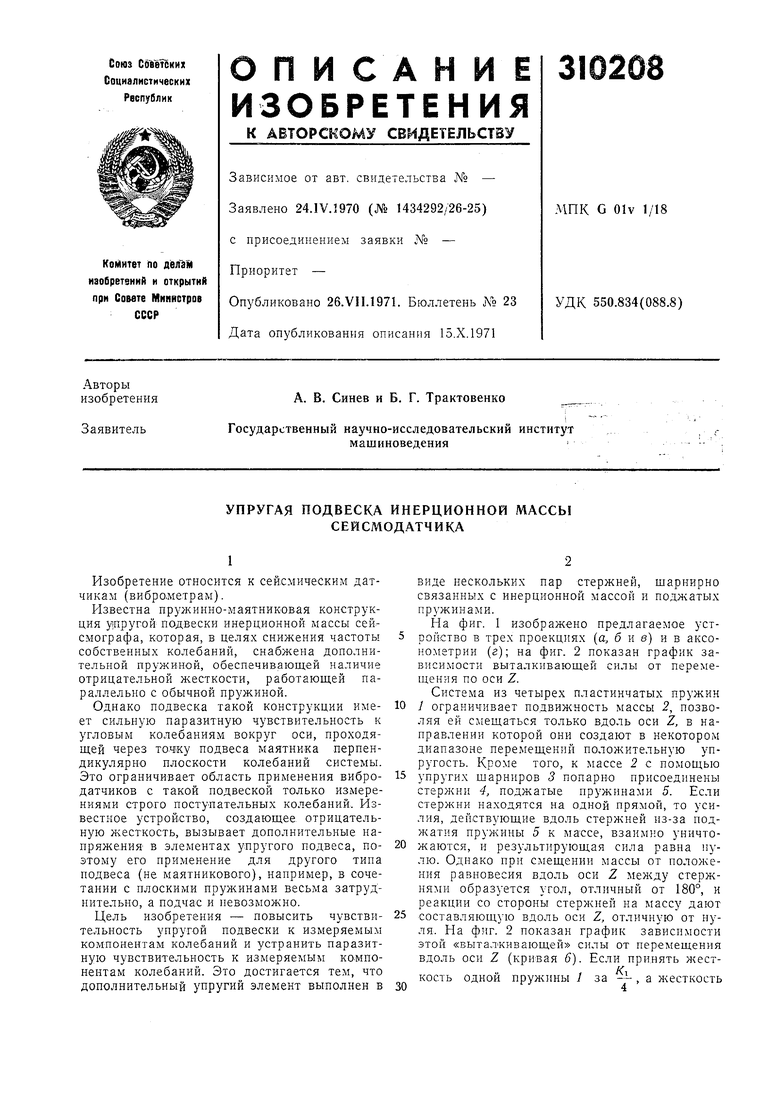
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования жесткостиупРугОй пОдВЕСКи иНЕРциОННОй МАССыСЕйСМОпРиЕМНиКА | 1978 |
|
SU842673A1 |
| Пружина ирисовой формы | 1974 |
|
SU542962A1 |
| Трехкоординатный преобразователь виброперемещений | 1988 |
|
SU1589096A1 |
| СЕЙСМОСТОЙКОЕ ЗДАНИЕ | 1996 |
|
RU2129644C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОМЕХАНИЧЕСКОГО АКСЕЛЕРОМЕТРА | 2011 |
|
RU2492490C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОМЕХАНИЧЕСКОГО ДАТЧИКА | 2005 |
|
RU2296390C1 |
| Рессорная подвеска железнодорожного вагона | 1985 |
|
SU1351823A1 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2004 |
|
RU2281515C1 |
| СПУТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2016 |
|
RU2627014C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА | 2002 |
|
RU2222780C1 |
