112
Изобретение относится к машиностроению и может быть использовано для лрецизионных исполнительных механизмов.
Цель изобретения повьппение коэф- фициента полезного действия.
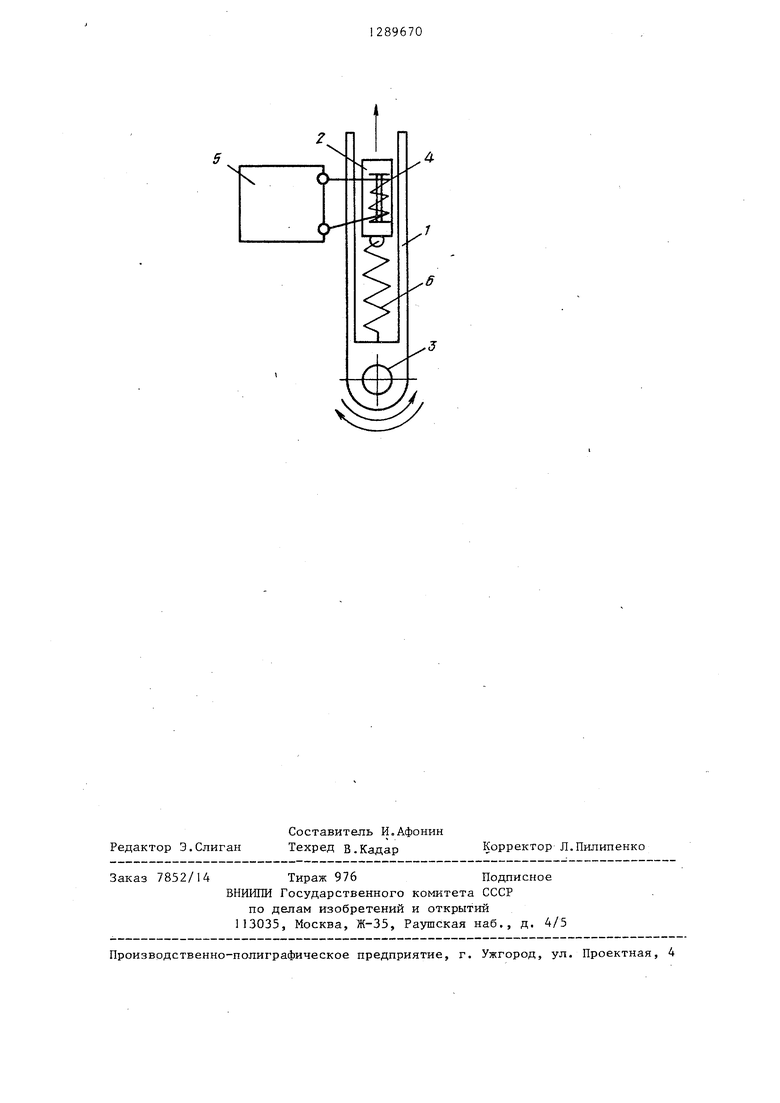
На чертеже показан вариант устройства, с помощью которого может быть .реализован предлагаемый способ пере мещения каретки.
Устройство содержит колеблющуюся направляющую 1, в которой установлена каретка 2. Направляющая совершает круговые колебания вокруг оси 3. На каретке закреплена управляемая связь например в виде электромагнита 4. На обмотку электромагнита поступают сигналы управления от блока 5 управления. Возврат каретки 2 в исходное положение может осуществляться или силой ее веса, или, как показано на чертеже, с помощью пружины 6, которая соединяет каретку 2 с направляющей 1 .
Способ осуществляют следующим образом.
Возбуждают круговые колебания нап равляющей 1 с одновременным периодическим силовым воздействием поверх
ностью направляющей 1 на каретку 2 в направлении, движения направляющей (т.е. перпендикулярно к ее поверхности по касательной к траектории , круговых движений направляющей). При этом каретка совершает движение вдоль направляющей в направлении стрелки, т.е. от центра колебаний направляющей 1 под действием центробежной силы.
На период значительного уменьше- 1ЩЯ и исчезновения центробежной силы, т.е. когда скорость направляющей меняет знак или близка к этому моменту, включают управляемую связь, подавая сигнал от системы 5 управления на катушку электромагнита 4. При этом каретка 2 фиксируется на направляющей 1. На период однонаправленного движения направляющей 1 уп- равляемую связь 4 выключают, устраняя сдерживающую силу движения каретки 2. При достижении требуемой линейной координаты управляемую связь 4 вновь включают, а колебание направ- ляЕощей 1 прекращают.
Собственно момент включения и выключения управляемой связи 4 опредеO
5
15
0
25
30
35
40
45 50 55
ляется условием равенства действующих на каретку 2 центробежной силы и силы, действующей на каретку в направлении, противоположном действию центробежной силы (т.е. силы веса или силы пружины 6). Синхронизация моментов включения и выключения связи 4 с фазами движения направляющей 1 может быть осуществлена посредством датчика скорости (например, индуктивного) направляющей 1.
Для совершения обратного движения каретки 2 выключают управляемую связь 4 при неподвижной направляющей 1.
Для движения каретки 2 использованы обе фазы колебаний направляющей 1, при этом она почти не имеет холостого хода и, следовательно, коэффициент полезного действия в предлагаемом способе существенно по- выщен.
Изменение амплитуды и частоты колебаний направляющей, а также изменение моментов включения и выключения управляемой связи позволяет в широких пределах регулировать скорость перемещения каретки и тем самым обеспечить режим ее движения согласно технологическому процессу использования манипулятора. Управление перемещением каретки манипулятора с позиционированием в требуемой координате возможно с помощью широко распространенной контрольно-измери-.
тельной аппаратуры, I
Формула ИЗ- обретения
Способ перемещения каретки манипулятора с колеблющейся направляющей и управляемой связью между направляющей и кареткой, заключающийся в том, что включение связи осуществляют в отдельной фазе движения направляю- пчей, отличающийся тем, что, с целью повышения коэффициента полезного действия, осуществляют круговые колебания направляющей и производят при этом периодическое силовое воздействие на каретку в направлении движения направляющей, а включение и выключение управляемой связи осуществляют в моменты, когда действующая на каретку центробежная сила становится соответственно меньше или больше силы, действующей на каретку в направлении, противоположном действию центробежной силы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления манипулятором | 1983 |
|
SU1127764A1 |
| ПЛАВНИКОВЫЙ ДВИЖИТЕЛЬ ПЛАВУЧЕГО СРЕДСТВА | 2015 |
|
RU2617321C1 |
| АГРЕГАТ ДЛЯ ФОРМОВАНИЯ ИЗДЕЛИЙ ИЗ ПОЛУСУХИХ СТРОИТЕЛЬНЫХ СМЕСЕЙ | 2005 |
|
RU2279974C1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПОСТУПАТЕЛЬНОЕ | 2011 |
|
RU2468488C1 |
| СПОСОБ ПОЛУЧЕНИЯ НАПРАВЛЕННЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ, СПОСОБ ПРЕОБРАЗОВАНИЯ НАПРАВЛЕННЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ В ОДНОНАПРАВЛЕННОЕ ПРЕРЫВИСТОЕ ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ, СПОСОБ УПРАВЛЯЕМОГО ПЕРЕМЕЩЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА В ЗАДАННОМ НАПРАВЛЕНИИ И УСТРОЙСТВА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТИХ СПОСОБОВ | 2004 |
|
RU2280513C2 |
| УСТРОЙСТВО для АМОРТИЗАЦИИ | 1970 |
|
SU259569A1 |
| ВИБРАЦИОННАЯ ТРАНСПОРТИРУЮЩАЯ МАШИНА | 2012 |
|
RU2532235C2 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2757427C2 |
| АГРЕГАТ ДЛЯ ФОРМОВАНИЯ ИЗДЕЛИЙ ИЗ ПОЛУСУХИХ СТРОИТЕЛЬНЫХ СМЕСЕЙ | 2005 |
|
RU2280557C1 |
| СПОСОБ РАЗДЕЛЕНИЯ СЫПУЧИХ МАТЕРИАЛОВ НА СИТАХ | 1991 |
|
RU2074774C1 |
Изобретение относится к машиностроению и может быть использовано в прецизионных исполнительных механизмах. Цель изобретения - повьше- ние коэффициента полезного действия. Способ перемещения каретки манипулятора заключается в том, что возбуждают круговые колебания направляющей с одновременным периодическим силовым воздействием на каретку в направлении движения направляющей, включают упр авляемую связь перед моментом изменения направления движения направляющей, фиксируя каретку от продольного смещения, и выключают ее на период однонаправленного движения направляющей. Причем сам момент включения и выключения управляемой связи определяется условием равенства действующей на каретку центробежной силы и силы, действующей на каретку в направлении, противоположном действию центробежной силы. 1 ил. 5 (Л ю оо 00
Редактор Э.Слиган
Составитель И.Афонин Техред В.Кадар
Заказ 7852/14 Тираж 976Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор Л.Пилипенко
| Способ управления манипулятором | 1983 |
|
SU1127764A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
