сл
с
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающийся генератор опережающих импульсов | 1989 |
|
SU1700533A1 |
| Устройство для проверки электронного коммутатора системы зажигания двигателя внутреннего сгорания | 1987 |
|
SU1451322A1 |
| Устройство для измерения угла закручивания вращающегося вала | 1991 |
|
SU1795312A1 |
| Устройство для измерения нелинейности пилообразного напряжения | 1986 |
|
SU1406528A1 |
| Цифровой электропривод | 1983 |
|
SU1102002A1 |
| Цифровой компаратор | 1980 |
|
SU930243A1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ ТРЕВОЖНОГО ИЗВЕЩЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2007 |
|
RU2379759C2 |
| Аналого-цифровой преобразователь параметров диэлькометрического датчика | 1988 |
|
SU1547063A1 |
| Устройство для измерения скорости движения объекта | 1989 |
|
SU1675780A1 |
| СТАБИЛИЗАТОР ПЕРЕМЕННОГО НАПРЯЖЕНИЯ | 1994 |
|
RU2072550C1 |
Изобретение относится к измерительной технике и может быть использовано для измерения величины текущих значений знакопеременных перемещений и их амплитуд. Цель изобретения - повышение точности измерений и увеличение гнформативности устройсыа. Это достигается путем введения еториго реверсивного счетчика, первого и второго компараторов, делителя напряжений, элементов ИЛИ-НЕ, счетчика, тре/ элементов И одновибраторз, элемента И-НЕ и двух RS-триггеров. При перемещении объекта магнитная головка формирует полярные импульсы в соответствии с дои - жением по пилообразным меткам датчика, которые подсчитываются в первом реверсивном с +етчике перемещения и обрабатываются введенными схемами с целью обнуления второго реверсивного счетчика в требуемый задаваемый период и подсчета в нем импульсов, соответствующих амплитуде. 2 ил.
Изобретение относится к измерительной технике и может быть использовано для измерения величины текущих значений знакопеременных перемещений и их амплитуд.
Целью изобретения является повышение точности измерений и повышение информативности за счет измерения как текущих величин перемещений, так и их амплитуд.
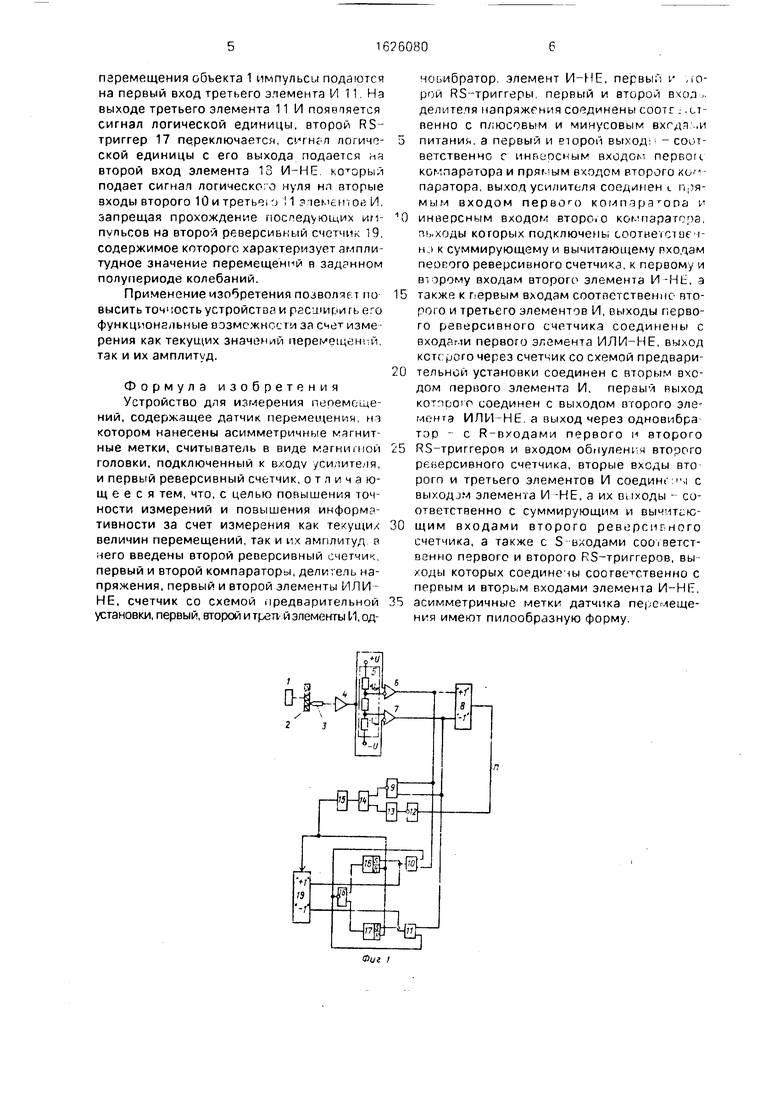
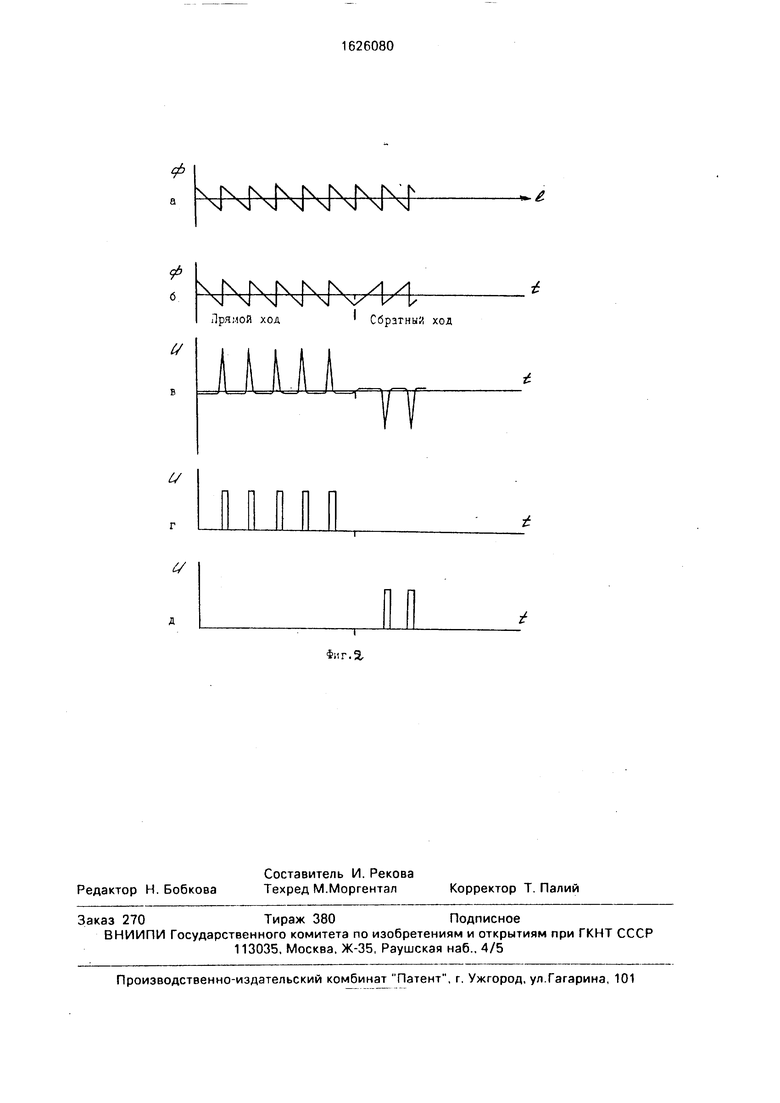
На фиг. 1 изображена схема устройства; на фиг.2 - диаграммы, поясняющие работу устройства,
Устройство для измерения перемещений содержит жестко связанный с объектом 1 перемещения датчик 2 перемещения, на котором нанесены пилообразные магнитные метки, считыватель 3 в виде магнитной головки. Считыватель 3 соединен с входом усилителя 4. Первый и второй входы делителя 5 напряжения соединены соответственно
с плюсовым и минусовым входами питания, а первый и второй выходы - соответственно с инперсным входом первого компаратора 6 и прямым входом второго компаратора 7. Усилитель 4 соединен с прямым входом первого компаратора б и инверсным входом второго компаратора 7, выходы которых соединены соответственно с суммирующим и вычитающим входами первого реверсивного счетчика 8, первым и вторым входами второго элемента ИЛИ-НЕ 9. первыми входами второго 10 и третьего 11 элементов И. Выходы первого реверсивного счетчикз 8 соединены с входами первого элемента 12 ИЛИ-НЕ, выход которого через счетчик 13 со схемой предварительной установки соединен с вторым входом первого элемента 14 И, первый вход которого соединен с выходом второго элемента 9 ИЛИ-НЕ, а выход черезодновибратор 15с R-входами первого 16 и второго 17 RS-триггеров. Выходы втоо ю о о
00
о
poro 10 и третьего 11 элементов И соединены с S-входами триггеров 16 и 17. Выходы первого 16 и второго 17 RS-триггеров соединены соответственно с первым и вторым входами элемента И-НЕ 18, выход которого соединен с вторыми входами второго 10 и третьего 11 элементов И. Суммирующий и вычитающий входы второго реверсивного счетчика 19 соединены соответственное выходами второго 10 и третьего 11 элементов И, а его вход обнуления - с выходом одно- вибратора 15.
Датчик 2 перемещения может быть выполнен в виде линейки, если измеряются линейные перемещения объекта 1, а также дугообразной или другой формы, соответствующей траектории движения объекта 1.
Первый реверсивный счетчик 8 служит для получения в цифровой форме величины текущих перемещений объекта 1.
Второй реверсивный счетчик 19 служит для получения в цифровой форме амплитудных значений перемещений объекта 1.
Устройство для измерения перемещений работает следующим образом.
Перед измерением, когда объект 1 перемещения находится в исходном положении, производится обнуление первого реверсивного счетчика 8. С помощью счетчика 13 со схемой предварительной установки задается номер полупериода колебаний, в пределах которого измеряется амплитуда перемещений.
При перемещении объекта 1 перемещается жестко связанный с ним датчик 2 пере- мещения, на котором нанесены пилообразные магнитные метки. Для определения направления перемещения используются дифференцирующие свойства магнитной головки и противоположность знака перепада между пилообразными метками при движении объекта 1 в прямом и обратном направлениях. Если при движении в прямом направлении I намагниченность магнитоносителя полого убывает в пределах метки (фиг.2а), то перепад между метками положителен, а при движении в обратном направлении - отрицателен (фиг.26). После дифференцирования магнитной головкой на выходе считывателя 3 в пределах участка пологого изменения намагниченности имеется незначительный сигнал, а скачкообразное изменение магнитного потока Ф при пересечении границы между метками вызывает на выходе считывателя 3 импульс напряжения, полярность которого соответствует направлению перемещения (фиг.2в). Импульс напряжения усиливается усилителем 4 и подается на прямой вход первого компаратора 6 и инверсный вход второго компаратора 7. Опорные напряжения положительной и отрицательной полярности +Uon. и -Don., подаваемые с первого и второго выходов
делителя 5 напряжения соответственно на инверсный вход первого компаратора 6 и прямой вход второго компаратора 7, по абсолютной величине превосходят абсолютную величину выходного напряжения
0 усилителя 4, соответствующего участкам пологого изменения намагниченности магнитных меток, поэтому первый компаратор 6 формирует счетные импульсы только при движении объекта 1 в прямом направлении,
5 а второй компаратор 7 в обратном направлении.
С выходов первого 6 и второго 7 компараторов импульсы (фиг.2г и д) подаются соответственно на суммирующий и
0 вычитающий входы первого реверсивного счетчика 8, содержимое которого характеризует текущее значение перемещения.
При каждом прохождении объектом 1 исходного положения содержимое разря5 дов первого реверсивного счетчика 8 становится равным нулю, при этом первый элемент 12 ИЛИ-НЕ формирует сигнал логической единицы, поступающий на вход счетчика 13 со схемой предварительной ус0 тановки. Когда его содержимое достигает значения, задаваемого схемой предварительной установки, на выходе счетчика 13 со схемой предварительной установки устанавливается сигнал логической единицы,
5 поступающий через первый элемент 14 И и одновибратор 15 на вход обнуления второго реверсивного счетчика 19 и R-входы первого 16 и второго 17 RS-триггеров, при этом происходит их установка в нулевое состоя0 ние. Второй элемент И-НЕ 18 и первый элемент 14 И необходимы для того, чтобы импульс обнуления не подавался до окончания счетного импульса, чтобы тем самым избежать возможности одновременной
5 подачи сигнала логической единицы на S- и R-входы первого 16 и второго 17 RS-триггеров.
При поступлении импульса на вход второго 10 или третьего 11 элемента И, напри0 мер второго 10, импульс передается на суммирующий вход второго счетчика 19 и S-вход первого RS-триггера 16, происходит переключение последнего, на его выходе и первом входе элемента 18 И-НЕ устанавли5 вается сигнал логической единицы. Последующие импульсы, поступающие на первый вход второго элемента И 10, не изменяют состояния первого RS-триггера 16. Происходит заполнение второго реверсивного счетчика 19 При изменении направления
перемещения объекта 1 импульсы подаются на первый вход третьего элемента И 11 Нз выходе третьего элемента 11 И появтяется сигнал логической единицы, второй RS- триггер 17 переключается, сигнс-л логиче- ской единицы с его выхода подается нч второй вход элемента 13 И-НЕ который подает сигнал логического нуля нп вторые входы второго 10 и треть -; 11 эчеметой И. запрещая прохождение последующих им- ПУЛЬСОВ на второй реверсивный счетчик 19, содержимое которого характеризует амплитудное значение перемещений в полупериоде колебаний.
Применение изобретения позволяе т по высить точность устройства и расширить его функциональные возможности за счет измерения как текущих значений перемещений, так и их амплитуд.
Формула изобретения Устройство для измерения пеоемеще- ний, содержащее датчик перемещения, нэ котором нанесены асимметричные магнитные метки, считыватель в виде магнипюй головки, подключенный к входу усилителя, и первый реверсивный счетчик, отличающееся тем, что, с целью повышения точности измерений и повышения информативности за счет измерения как текущих величин перемещений, так и их амплитуд в него введены второй реверсивный счетчик, первый и второй компараторы, делитель напряжения, первый и второй элементы ИЛИ - НЕ, счетчик со схемой предварительной установки, первый, второй и третт и элементы И, одН- чоьибратор. элемент И-НЕ, первый и ло- рои RS-триггеры, первый и второй вход . делитепя напряжения соединены соотг . ,ел- венно с плюсовым и минусовым входя ,и питание, а первый и еюрой выход - соответственно с инвс осным входом первой компаратора и прямым входом второго компаратора, выход усилителя соединен L прямым входом первого компаратора и инверсным входом второ.о компаратора, пь,ходы которых подключены соатнечсюем- н„ к суммирующему и вычитающему рходам пеоЕого реверсивного счетчика, к первому и вт эрому входам второго элемента И-НЕ, а также к первым входам соответственно второго и третьего элементов И, выходы первого реверсивного счетчика соединены с входами первого элемента ИЛИ-НЕ, выход кстгрого через счетчик со схемой предварительной установки соединен с вторым входом первого элемента И, первый выход котпоо о соединен с выходом второго элемента ИЛИ-НЕ а выход через одновибра тор - с R-входами первого и второго RS-триггеров и входом обнуления второго реверсивного счетчика, вторые входы вто рого и третьего элементов И соединг м с выходJM элемента И -НЕ, а их виходы - соответственно с суммирующим и вычитающим входами второго реверсивного счетчика, а также с S-входами соо ветст- венно первого и второго RS-триггеров, выходы которых соединечы соответственно с первым и вторым входами элемента И-НЕ, асимметричные метки датчика перемещения имеют пилообразную форму.
Ф
vWsh sJXhsKT
xNKNNrv Vt
Прямой ход
/
Обратный ход
| Устройство для контроля перемещения | 1984 |
|
SU1226019A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения линейных перемещений | 1980 |
|
SU979845A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
