Изобретение относится к автогу1,Ч|-изаци 1 оператиЕиюго контроля и управления про- изнодственыыми процессами и может бмтъ исио,1ьзовано в автоматизиро аипых системах оперативного контроля и унран. км ия транспортом.
ij,e;ib изобретения - новьпиение точности определения направления неременюнинл
На чертеже нредставлена функниоиаль- ная схема устройства.
Устройство содержит первый 1, ито- рой 2 и третий 3 датчики, соединс1.:иые соответственно с первым 4, вторым 5 и T;IC- тьим 6 счетчиками, подключенными к Н1ифратору 7, первый 8 и второй 9 элементы ИЛИ, соединенные с ден ифрат()ром 7 и через третий элемент ИЛИ 10 со счетчи- ками 4-6, четвертый 11, пятый 12 и niec- той 13 элементы ИЛИ, юдключенные к ,№- Н1ифпатору 7, трип ер 14, соединенный с y.ic мента.ми ИЛИ 1 1 и 12 и первым 15 и вторым if) элементами И, подключенньп ли к si.ic- ментам ИЛИ 8, 9 и 13.
Устройство работает следующим обгзазом.
Ири перемещении колес транснортнок: средства в зоне действия датчиков 1 3 м- следпие поочередно формируют сигпал1.,1, госту па юнше соответетвенно па счетчики 4 (i. Датчики 1 3 расположены так, что последовательность их работы при неременим ии трапспортног о средства (например, двухосного) от датчика 1 к датчику , без смены направления движения в :5оне .ия датчиков 1 - 3 следукмцая: 1 2 3-2 :i. Ири неремеп1.е11ии транснортпого сре/г.тиа в odpariiOM панравлепии датчики 1 -- 3 фор.ми руют импульсы в следующей послед,овател1 ности: 3---2- 3--1- 2 -1. Импульсы датчиков 1 3 суммируются еоответстве1:н() сч5 г- чиками 4--6. Иеременгение TpaHCiiopriioro средства в зопе действия датчиков 1 . ; возможно как без измене1 ия, так и ;; чз м е не и и е м и а п ра B.ien и я.
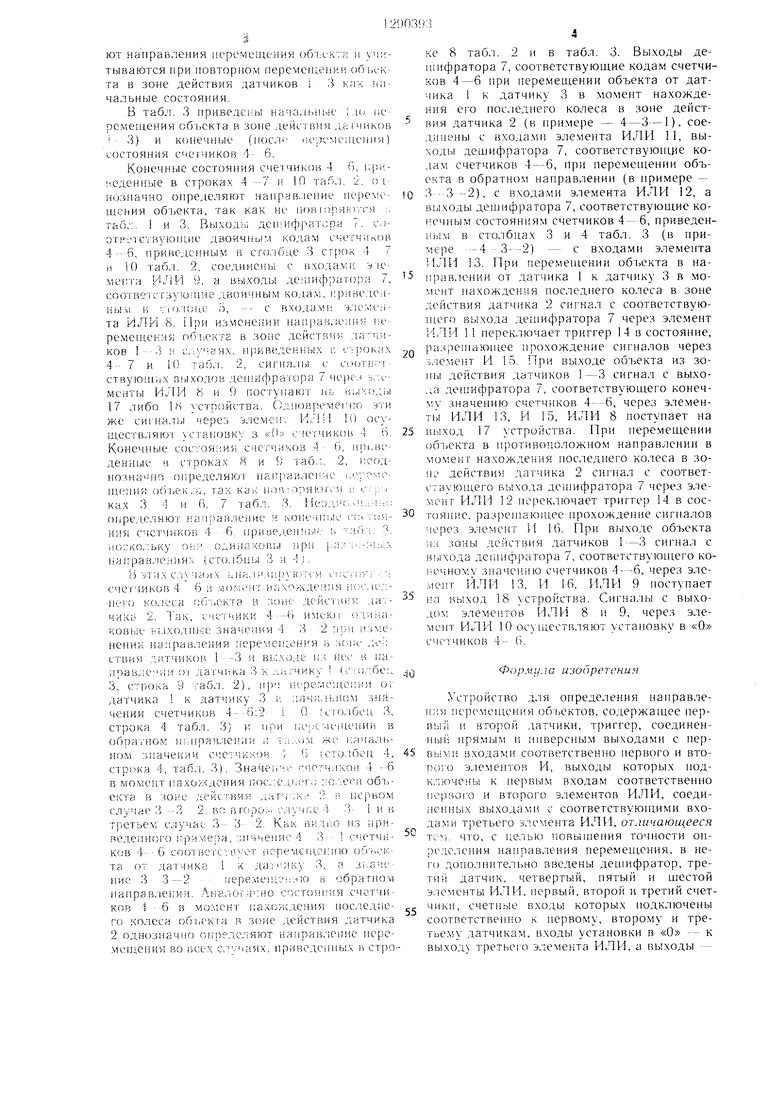
В табл. 1 приведепы состояния счетчиков 4 6 нри перемещении ко1ггро:1ируемого об ьекта без изменения направ.тепия o i датчика 1 к датчику 3 (столбны 2, 3...5; :-; я обратпом направлении (столбпь (i, 7.,...91.
Как видно из первых пяти :трок таб.л L состояния счетчиков 4 - (з в ка.ждый мом; ii-i времепи однозпачпо определяют ч(),:1оже1:ие контролируемого об ьекта и наирав;;си е eio перемещения относите,. 1ьно датчиков I .. Состояние 2 2 2 {010 К) 1) счетчиков 4 i). приведенное в строке 6 табл. 1, свиде |-1 л. вует о том, что контро.1ируемый об ьокт вын1ел из зоны действия датчиков 1 3 бе; из.менения направления движе)ия. Иис. И ;; нее состояпие счетчиков 4 6, характе;)изу- юн1ее положение контролируемо|-о об-ьехтг- и направление его неремеп1,ения пере;:, уходом из зоны дейетвия датчиков 1 .. формируется в момент нахождения послс д- него колеса контролируемого з : , действия ,г1атчика 2 и приведено в с)(ке
: | табл. 1. Как видно из строки 5 табл. 1, движении контролируемого объекта в на- ) от датчика i к датчику 3 еое- тг)Я1.:яе счетчиков 4 G: 22- (010110), а при ;1вижении и обрат1 ом направлении: 1 22 (100101). Л.еп ифратор 7 преобразует двоичные коды счетчиков 4 6 в еди- ;1ичи1 й позиционный. Выход депшфратора 7, сс. гзтветствуюп ий двоичному коду 010110, характе)изуюн1ем V дч ижение контролируемого; об 1г;кта ;.| направление от датчика 1 к датчику 3, через элемент ИЛИ 1 1 еое- с входом устагговки в единицу триг- i-epa 14, а выход денжфратора 7, соответ- cTJiyionuiи ко;;,у 010101, свидетельствующему о то.м, что контролируемый об ьект выпJeл и: зонь действия датчиков 1 3, через элемент ИЛИ 1.) с од. из в1)Гходов элементов И iS и К).
ри пе)е :ег11ении об ьекта от датчика 1 к датчику : без и.змс-пеаия наг1)авлепия не- ;)сме цеиия is .--loiie .действия датчиков 1- 3 в момент нахождения носледнегч) чолееа в зо- :ie действия .датчика 2 (2- -2 1} сигнал с .о.ответствуюпичч) вь:хода деп ифратора 7 через э:1емент ИЛИ П vc i-апавливает в «1 триггер 14, ра:}рем1ая прохождение сиг нала
к- рез элемен;- И 15. В моме1гг («ахожде- :и- я поеледнего Ko.ieca в зоне действия 3 (2 2 2) сигч;ал е соответствую- и;сч-о выхода дс-н й())ратора 7 через элемент ИЛИ , элемент И о и элеме1гг ИЛИ 8 чоступает г а выход 17 устройс Т)а. Ири пе- :)емеи1епии об ьекта ь обратном 1 анравлении :; момент нахожде1 ия лоследне -о колеса в зоне де и-твия датчика 2(1 2 2; сигнал с .;)о. -всгг ;твук)Г1его 1(ыхо;;а д.еп1ифратора 7 че)сз злс лент ИЛИ 12 уста1{а;;;1ивает триггер
:4 li «О. ).чзре1иая прохождения сигпа- .ia через элемергг И 16. В момент нахождения пос;1еднегс колеса в .зоне действия датчика 1 (2 2 2) си ч;а;: с соответствуюЦ1.ТЧ) 15ыхода дел1ифоатс))а 7 через элемент 5, элемент И И), элемент ИЛИ 9
чх слх чаях гиг ма. ; выхода элементов ИЛИ 8 и 9 через улемечт ИЛИ 10 осу- iiecTaj HK)T установку н , счетчиков 4 6 и уегройст) готово к говтопному действию.
В табл. 2 приведепа последователь- поп ь работь датчиков j 3 и конечные гогтояп..(я счс гчиков 4 ) (состояния после в1-:хода из 3oni.i действия датчиков 1 --3) iipK измеиенни ;ап :;ав:1енин перемеп1епия об|,(;ста в зон дейетвия датчиков 1 3.
i/r( . ; V, 5 таб.:|. 2 мож}1о уелов- i;c )азбить на 3 части: 1 - со- .1ержим:)е сче:: чиков 4 6 од1 оз 1ачно определяет паиравлечне герем(чцепия объекта; 2 - соде)жимое с етчиков 4 6 -1еодпо:5иачно оп- ределяе - 11аправление г1еремеще1П1я , со;.1е|).жимое счетчиков 4 - fi lie опреде- .1яе:- ;гп1() перемещения . Кгшечние состояния счетчиков 4 6 1риведе- нь li строках 3 табл. 2, не определяют направления иеремел ения обтл К га и учитываются при повторном перемещении обьек- та в зоне действия датчиков i 3 как начальные состояния.
В табл, 3 нриведс -:ы нача:1ьн1 е iк; не- пемен;ения об ьскта в зоне действия датчиков i - 3} и конечные (носл; иерс мсщения)
состояния С К ТЧИКОВ 4- 6.
Конечные состояния счетчиков 4 о, i;pti- иеден 1ые в строках 4-7 и 10 таг,л. 2, о i- нозначно онределяют наирав.ление 11е)еме- щсния об векта, так как не нов горяюп-я :: таб:;. 1 и 3. Вв1ходь; дешифратора 7. с.)- отйетству1ОН1не двоичным кодам счетчиков
46, приведенным в CTo.:i6;ie 3 ст)(ж 4
и И) табл. 2, соедине11Ы с в.ходамг: - менти И/1И 9. а выходы де;нифратора соотве1ст;5ую ние двоичным кодал;, приведен- HiiiAi li c iO. о, -- с элемента АЛИ 8. При из.менении направления перемещения объекта в зоне действия ков 1--3 .. случаях, н(5иведент(Ых i- ст(жах 4-7 и i О табл. 2, сигналв: с соот 1; т- ствуЮ Ц,1Х в.ыходов дешифратора 7 через з/ч- менты ИЛИ 8 и 9 постунают иь н:..г-:од:,1 17 либо 18 устройства. {)дн()време1Л О Э1Т , же си1-на;;ы через элемен; И;. И1 К) осу- 1деств,ляют vcTaHOBKv з «(Ь счетчиков Конечные сосгоямия счетчиков 4 - П, i деннв1е в строках 8 и 9 табл. 2, нозна пю определяют направлению iiov ONie- шеиия с)б ,ек;а, так кз,-, ;Оряк)ггя ;; .: / ках 3 4 и fi. 7 табл. 3. .-.:,1ч;:;: онре.теляют )авление и | опечпь е с;:. :ч;/:- ния счетчиков 4 6. iipnuej.einibi;.- i-, i. . ио;:ко,-;ьку Oi;: о„инаковы при j;;v--; c-i :.:х на1:рав. (столбшл 3 и - i.
о тих с. 1 ЧаиХ ана:1И.51 р К} : 1 я v ocvi;/ - - : счетчиков 4 6 в .:о ле;1т г);; о/кде П1Я ппсле.;:- него колеса сб ;,екта в зоне дейстния датчика 2. Так, счетчики 4 --о HMCKJ одинаковые Ь1,1ХС) значения 4 3 2 чпи изменении на: 1авления ггеремеи ения в зсше деп етвия дитчикс)в 1 -3 и в.:;ходе Нл нес в на (с:ч;лбе1, .клиепии 01 .ibiiOM зна- K TO. i6cii, 3. :.еп1еиии в же г:ача. Н)- столбен 4,
;ipaBj;e: i-i; 3, строка
датчика к датчику 3 г. ;;а чении счетчик.)В 4--6;2 i О строка 4 табл. 3) v, н ри i;e обратном нанравлеиии ,: т;;:ч); ном значении счетчиков 4 i CTpisKa 4, таб.1. 3). Значен е в момент 1 ахо ; дения пос::е.:,ь;; ектэ в зоне декс вия латччкл7
третьем елучае 3- 3 2. Как вид1;о и: веденного нримеоа , знчче 1ис 4 3 1 счетчиков 4- - 6 cooTBC iT:-;ч ет 11Сремен,с1:ию об .,ск- та от датчика 1 к даг Л ку 3, а значение 3 3-2перемет ;:1Ю н обратном нанрав:1е11ии. Лналоглсно состоя ;1Я счетчиков 4 -6 в мол;ент нахождения нос.едне- го колеса об век са в зоне д.ействия диггчика 2 однозначно онределяют г анравление нере- .мен1е11ия во всех сл /наях. нриведе 1ив1х в стро
0
5
20
25
30
35
4и
45
50
55
ке 8 табл. 2 н в табл. 3. Выходы дешифратора 7, соответствующие кодам счетчиков 4-6 при перемещении объекта от датчика 1 к датчику 3 в момент нахождения его пос.:|еднего колеса в зоне действия датчика 2 (в примере - 4-3-1), соединены с входами элемента ИЛИ 11, вы- ХОДВ1 дешифратора 7, соответетвуюнше кодам счетчиков 4 - 6, при перемещении объекта в обратном направлении (в примере - 33-2), с входами элемента ИЛИ 12, а выходы ден ифратора 7, еоответствующие ко- нечнв1м еоетоянилям счетчиков 4-6, приведенным в етолбцах 3 и 4 табл. 3 (в примере -4 3--2) - е входами элемента ИЛИ 13. При переменхении объекта в на- нравлении от датчика 1 к датчику 3 в момент нахождения носледпего колеса в зоне действия датчика 2 сигнал с соответетвую- Hiero выхода ден1ифратора 7 через элемент I ЛИ 1 переключает триггер 14 в состояние, разрен1аюи1ее прохождение сигналов через леме1П- И 15. При выходе объекта из зо- iiiji действия датчиков 1-3 сигнал е выхода де1нифратора 7, соответствующего конеч- му значению счетчиков 46, через элементы ИЛИ 13, И 15, ИЛИ 8 поступает на выход 17 устройства. При неремещении об ьекта в нротивоположном направлении в моменг нахождения ноеледнего колеса в зоне действия датчика 2 сигнал с соответствующего выхода депн1фратора 7 через эле- менг ИЛИ 12 нерекл.ючает триггер 14 в сос- тсптние, раз)е1наюгцее нрохождение сигналов через элемент И 16. При выходе объекта и:-.; зоны действия датчиков 1--3 сигнал е В,1хода ден1ифратора 7, соответствующего ко- ечн.ому значению счетчиков 4- -6, через эле- менг ИЛИ 13, И 16, ИЛИ 9 ноступает на выход 18 устройства. Сигналв с выхо- до.м элементов ИЛИ 8 и 9, через элемент ИЛИ 10 осуществляют установку в «О счетчиков 4- fi.
Формула изобретения
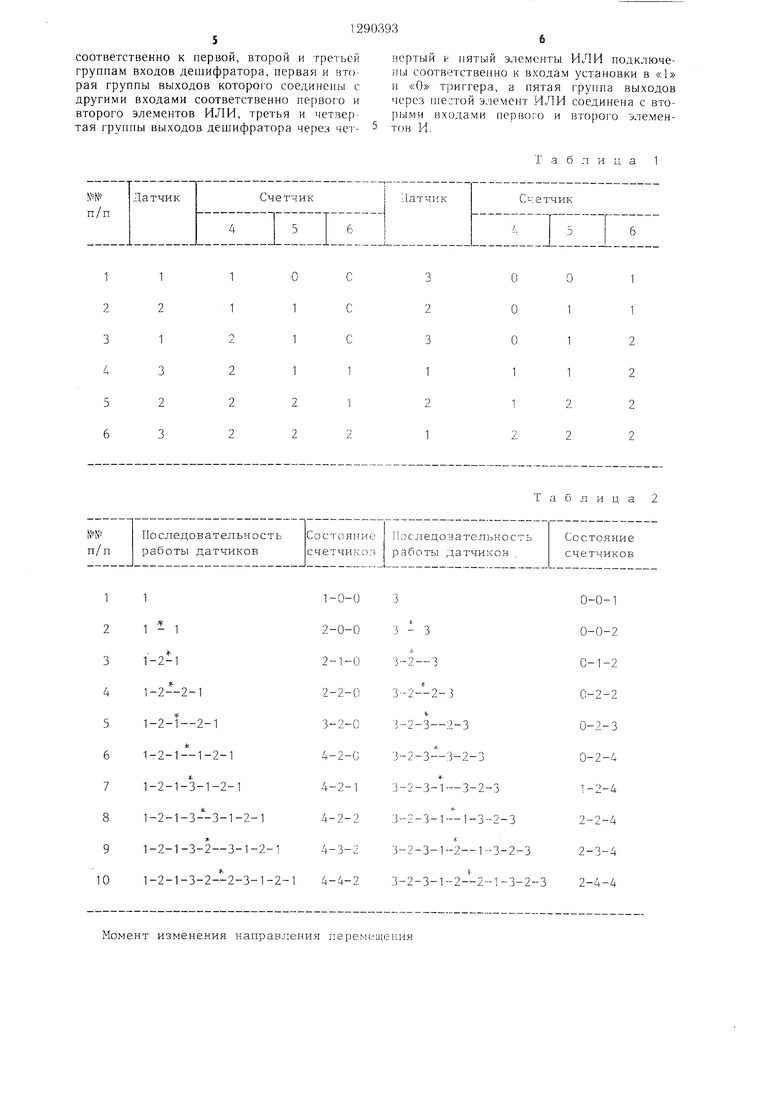
Устройство для определения панрав,че- ия иеремеи1ення об ьектов, содержащее пер- Bbiii н второй датчики, триггер, еоединен- HijHi нрямв1м и ииверсным выходами с пер- вым11 входами соответственно первого и второго элементов И, выходы которых подключены к нервв1м входам соотЕ5етственно не 1ВО1 о и второго элементов ИЛИ, соединенных выходами с соответствующими входами третьего з, емента ИЛИ, отличающееся тем. что, с целью новьпиения точности он- pe.ie. ieHHH направления перемещения, в него дополнительно введены дещифратор, тре- т.ий. датчик, четвертый, пятый н щестой э.лементы ИЛИ, нервый, второй и третий счетчики, счетны.е входы, которы.х подключены соответственно к нервому, второму и тре- тье.му датчикам, входы установки в «О - к выходч третье: о элемента ИЛИ, а выходы соответственно к первой, второй и третьей группам входов дешифратора, первая и вторая группы выходов которого соединены с другими входами соответственно первого и второго элементов ИЛИ, третья и четвертая группы выходов дешифратора через чет-
2 1 3
№№ п/п
Последовательность работы датчиков
тон И.
вертый и пятый элементы ИЛИ подключе- ь;ы соответственно к входам установки в «1 и «О триггера, а пятая группа выходов через шестой элемент ИЛИ соединена с вторыми входами первого и второго элеменТ а блица 2
Состояние счетчиков

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления | 1983 |
|
SU1160367A1 |
| Устройство для исследования темновой адаптации | 1986 |
|
SU1519642A1 |
| Способ поосного взвешивания железнодорожного состава в движении | 1985 |
|
SU1278604A1 |
| Устройство для контроля и учета количества движущихся объектов | 1986 |
|
SU1437887A1 |
| УСТРОЙСТВО для КОДИРОВАНИЯ и ВОСПРОИЗВЕДЕНИЯ КАРТ ПОТЕНЦИАЛЬНЫХ ПОЛЕЙ | 1968 |
|
SU208345A1 |
| ШАГОВЫЙ ГРАФОПОСТРОИТЕЛЬ | 1970 |
|
SU267216A1 |
| Реверсивное счетное устройство | 1989 |
|
SU1709516A1 |
| Устройство для ввода информации | 1986 |
|
SU1381473A1 |
| Устройство для контроля и управления технологическими процессами испытаний и тренировки фотоэлектронных умножителей | 1988 |
|
SU1517041A1 |
| Устройство для регистрации сигналов, представленных в цифровой форме | 1976 |
|
SU659904A1 |
Изобретение относится к автоматизации онеративного контроля и управления производственными процессами и может быть использовано в автоматизированных системах оперативного контроля и управления транспортом. Цель изобретения - повышение точности направления перемещения. При перемещении колес транспортного средства в зоне действия датчиков 1, 2, 3 последние поочередно формируют сигналы, поступающие соответственно на счетчики 4, 5, 6. Датчики 1, 2, 3 расположены таким образом, что состояние счетчиков 4, 5, 6 и соответствующие им выходные сигналы дешифра тора 7 в каждый момент времени однозначно определяют положение контролируемого объекта и направление его перемещения. 3 табл. 1 ил. N3 О ОС ;с ОС
2 1-1
3 f-2-l
1-2-2-1
1-2-1- -1-2-1
1-2-1-3-1-2-1
1-2-1-3- -3-1-2-1
1-2-1-3-2-3-1-2-1 1-2-1-3-2--2-3-1-2-3-2-3--2-33-2-3- 3-2-3 3-2-3-1-3-2-3 3-2-3-1---1-3-2-3
Момент изменения направления перемглцекия
Таблица 3
| Устройство для определения направления перемещения объектов | 1977 |
|
SU622143A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
