1127
Изобретение относится к весоизмерительной технике, в частности к способам взвешивания железнодорожного состава во время движеьшя.
Цель изобретения - повышение точ- ности за счет уменьшения влияния ио- мех, вызываемых нерераснределеииек осевых нагрузок из-за неровностей пути.
В предлагаемом способе осущестзляется подавление помехj которые вызываются перераспределением нагрузок из-за неровностей пути,
Способ осуществляется следующгьм образом.
Несмотря на большое разгюобразис
типов подв1 Скных об ьектов, имеют детермиш-гроварн ые ме.жссевь е расстояния (около 1800-1850 мм), при этом то 5 что первая п вторая тележ- ю-1 об ьектов разнесены друг от друга ка самые различ1а1е расстояния (например, дня четырехосных вагонов от 4000 до 8000 мм) яе имеет большого зкггчения. так как перераспределение осевых нагрузок от неровностей пути, например, под ося№1 neLVoon тележки происходит ввиду наличия автономной пруш-пи-юй системы рессорног о подве- шивания в основном мелсду осями именно первой тележки, слабо влияя па со- седни е тел ежкн.
Указанная детерминированность межосевых расстояний талелчск ириводггг к тому, что при переме1П;бни -5 по лссаъг например 5 четырехосных объектов спе ва направо и справа iiajisBO взаимоггей- ствуют одни и те же участки железнодорожного пути и весовая 11латфорь а. При дврисении шестиосных объектов взаиьюдействуют уже другие участки железнодорохаюго путИ} а i-pn движении восььшосных -треты; .
Таким образом, взаимодействие неровностей железнодорожного пути и весовой платформь носит при идеальном .состоянии подвижного объект, не случайный, адетерминированный характер и может быть учтено осевгл-п- коэффициентами, принципиально различными для объектов различной осиости. Осевые коэффициенты есть не что ипое, как индивидуальные для оси масштабные множители, примйнехьче которых позволяет исюн-очить вои1яние профиля железиодорожиого пути па результат взвешь вари-ьч,
5
0
5
15
.
35
45
55
Поскольку подвижшле в том числе и контрольные J об ьекты не являются идеапьнь ми и при самом тщательном отборе имеют по крайней мере ьгикро- неровиости 5сругов катания, еще более проявляю1циеся в процессе эксплуатация ввиду неравномерности износа, способ предлагает разметку колес контрольных объектов на секторы Нап- ри;чер5 кя:адое колесо мо.жет размечаться на три сектора А,В и С так у что наезды контрольного объекта на весы осуществляются каждым из секторов А,В5, С поочередно, что обеспечивает контактирование :;зсей окрулиюсти круга катания колес с весовой нлатфор- мой ijj таклм образом, статистическое ycpei Heinie д гйстгзия ггеровностей самого конт}5олыгаго объекта
Так как диаметр колес 5Ю кругу катания составляг-т 950 - 1050 s-iMs а д.мина окрула-юсти соответственно 3000 3300 мм, то для обягепринятой сейчас при тюосиом взвегаивалгл-г дли- };есовой JIa. 1300 мм разбие- 1ие колес на три сектора А, В и С наиболее це.11:есооС1разпо и обеспечивает хорошее усредке1- ие неровностей самих объекто в,
Таким обр азом; для исключения влияния профиля г:ути па результат необходимо при .взвешивании определить тип (осность)J после чего ум- ложениеь результатов взвещивания осей n;i осевью коэфсоидиеп/гы и суммированием произведений н:айти дей- ствителыг/ю Mciccy объекта Осевые ко- зффи л е1-ггы действительны толгзко для г.опкретпого железнодорожного пути,
Иа фиг. 1 изобра;кена блочио-кине- матическая схема устройства реали- зу 01дегс способ; на фиг 2 и 3 - злектр ческие .ипиальиые схемы узлов устройства; на фиг 4-7 - по- Hcneinie способа.
Устройство 5 реализующее предла,- ;: аемь Й способа содерлсит встроенные в :селезнодорожр ый путь i весовые модули 2 (фиг,; в разрезе одип из модулей 2э второй распопожеи параллельно) зУкреплеппые на фундаментных блоках 3 с помощью струнок-фиксато- Л, Колеса 5 подвижного или контрольного объекта воздействуют на весоизмерительные Д 1тчики 6s на которые опираются весовые ъюцели 2 (фиг, з тележ -:а четырехосного объекта).
3
Быход1Л датчиков G, соеддшепиья.: параллельно, подюнэчаются через вхоной блок 7 к блоку 8 обработки сигналов и блоку 9 идептификаш.и J соединенному таюке через схему К) направления с путевыми датчикам 11 н .12 (например 5 рь ча:кно-контактпого тина).
Во входном блоке 7 осуществляется усиление и компенсация начального разбаланса датчиков б, а таюке фильтрация высокочастотных составлящих для облегчения последующей обработки их по одному нз известных алгоритмов блоком J) .
Блок 8 пер1;даот в бло1с 13 .умчох.;о ния результаты обработки сигналов по отдельным ося{1 Р. и н. oceii -.
Связанны с блоком 13 умиол;еАП я блок 14 осевых коэффициентов представляет собой энергонезависимое зап ьинающее уст ойство (ЭЗУ) , выь о.чнси ное. наирикер, на микросхемах, входа дапиых и адреса запис которых нодсоеди 1еиы к устро1 ству 15 ввода, а шяиь адреса . - к ныход.а схемл 10 нап равленыя и блока 8 оСм.ю ботки.
В блоке 14 осевьск коэффитдиентоз. хршштся следующие числа: oceisbic ко эффидиенть для четь рехосньо: объекдля и естногных об ьеИ ВОСЬМ ОСП : Х
тов К,, и К., , тов Kg,, К,,,., К объектов K,j ,. Kg,,, Kg. и К,. Первое число индекса коэффициентов обоначает осность обьекта, второе по .мер оси.
Но cuoeii еуЕ,ноетн коэффициепты. К(,1, определяем ;1е при 1изкой скорое ти об ьекта по весовым модулям 2j не зависят от направ.ле- ния движения,
Однако нрактичес с.и коэффициенты Kj приходится определять на скороти норяд са 2-3 км/ч и возможны таки неровностей лселезнодорож ого пути 1, динамическое воздействие которых на весовые модули 2 не o;:nina- коЕО при перемене направленная движения.
Поэт.ог-гу, ecJHi при измененин направления движения получают заметно различзло циеся коэ(Ъфицие -1ты К..-, то в блок 14 записывают отдельно Ш-1Я К,|. для левого направления и отдел ьно для правого,
5
0
5
0
5
0
5
0
5
coooi, nanpiib ep j
ввода предстсп;. nioroKOiiTflKTiii 3 : e
реключатсли ;здрссоБ nanncii и дО Пллх, на которых оператором гзручпую уста- мавлмваются величины осевых коэффг:- I ienTOU, определе.ыкьп-с в процессе работы, и адреса ячеек памяти, и которых ста долкапл храниться (не показана) .
Дня ослабления влияния на веоТичиНу коэффициентов IiepOBUOCTQli
колес; 5 самих контрольных объектоп колеса 5 последних размечаются на секторы Л, В и С (фиг.1). Пр;; прока- тыцп.мпп кО П рол1Л1ых обьект О д 3 1 ;;i:0i ;: J чтобы тго/чсса 5 кс.|}1 ;;кл ;:р:;,,-а ли поочередно (безразлично в ясаком порядке) с весоЕглм модулями 2 I ce- ми частями кругов каа акня, ириапдле- ;:;а1ци : сектораь: А.З и С, что при пос- ледуюш.ем сумм ровапии результ;1тов по всем секторa ; А, В и С для иа ocei мит1:1;-п;зпр уют влияние пе-ров- постей колес 5, С помои ыо блозса 13 умноясепил входь; KOTopoi o свчзаиг с выходами блока 8 обработки п блока 1 С ССБЫХ KooiibiuiieHTOB, находятся O4;;;i;ejini.;o от Блl:яvпIЯ профил:/; v;v- iii pf3yjiL;Tai :i иззещи зания jro отде;;ь пым осям. Сумматор 16 производит С:1ол-:е11ие получе; ных результатов, а регистриру:о)цее устройство 17 фиксг;- рует результат зззвегнивания объс.ктг;- U целом при получен - -; от блока 8 сигнагла Г С ретстрация) ,
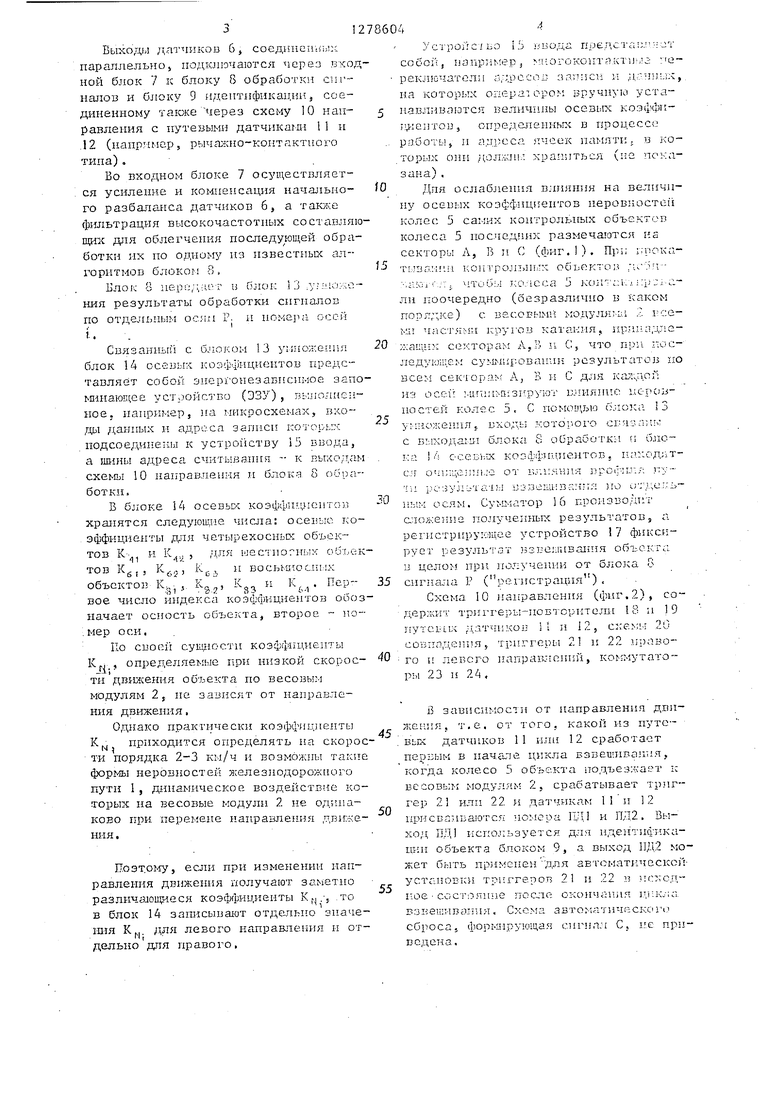
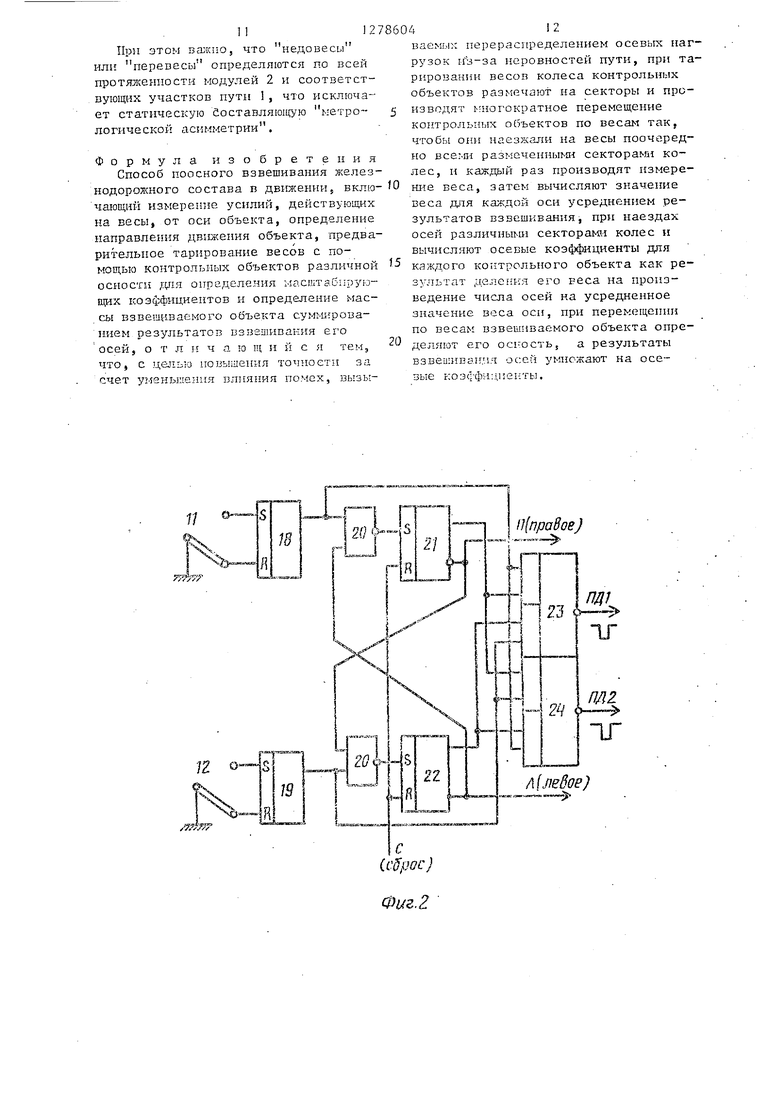
Схема 10 паправления (фиг.2), со- дер:х1-гг трип-еры-иоБтоуители 18 и 19 iryTei-Lix датчиков 11 и 12, .i 20 совпадеш я5 триггеры 21 и 22 правого и левого направлений, кo ;мyтaтo- ры 23 и 24.
13 зависимосзи от направления движения, т.е. от того, какой из путевых датчиков 11 I lmi 12 сработает первым в начаоче цикла Бзвешмвания, когда колесо 5 объекта подъезжает к вссовь:м модуляь 2. срабатывает триггер 21 НЛП 22 и датч икаь 1 и 12 присваиваются номера 1Г11 и ПД2. Выход ГЩ 1;спо.пьзуется д.ля и. пип объекта блоком 9, а выход Г1Д2 может быть применен Для автсматичаской- установки. триггеров 21 и 22 в ис:; од- KiOe сост;эяппе после о2-сончаг ия ii,r;j-;j-;;i Б31-;е 1 ива11ия. автоматического сброса, формирую1ца,я сигнал С, п,е приведена.
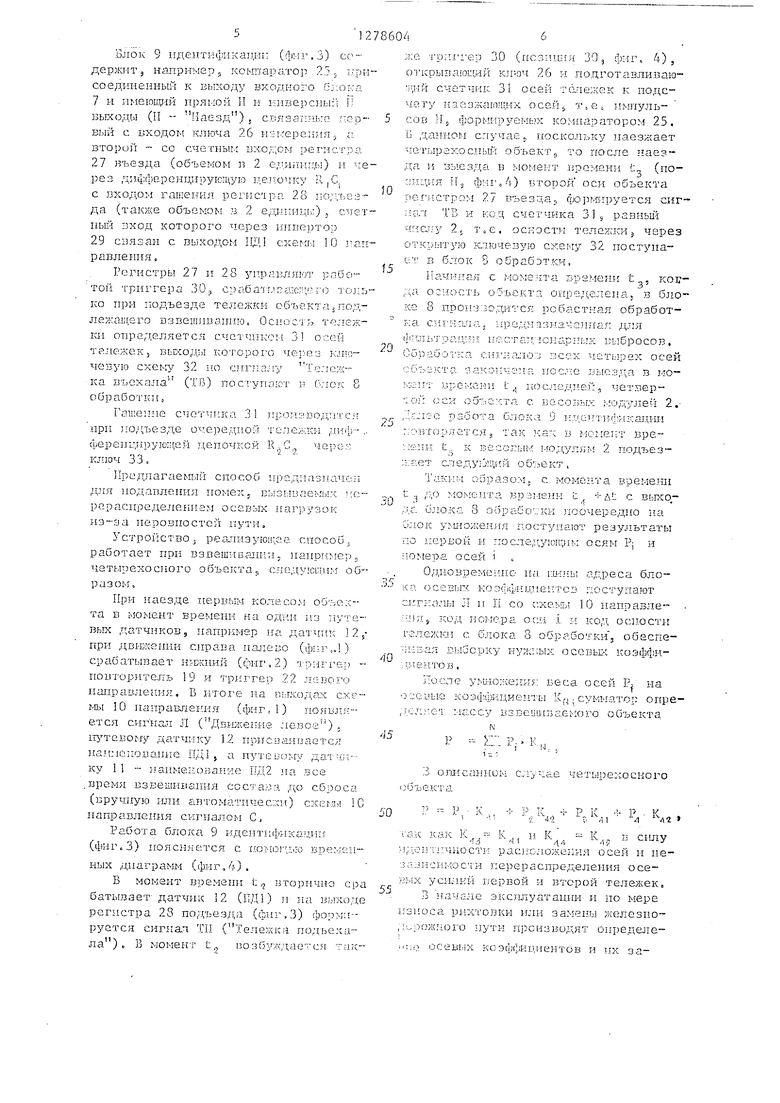
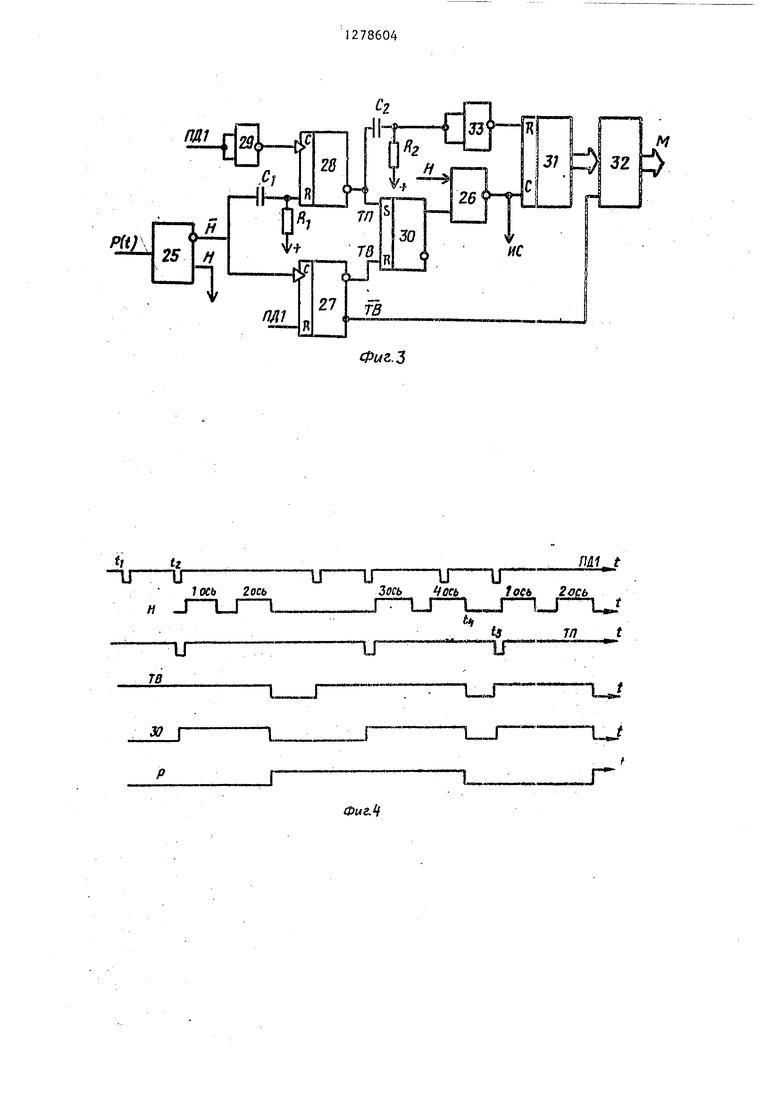
держит, например, компаратор х.:, гфи- соединенный к вьпсоду вхс диого CjiOKa 7 и имеющий прямой И и inusepciibni П Бькоды (II -- Наезд), связанные пор- вый с входом ключа 26 и -герепия, а второй - со счетным регистра 27 )3 ьезда (объемом в 2 еднгн-пг.ьО и ч:ес входом гашения регнсчра 28 пол.ъез да (также объемом в 2 едапиць;) j ньш вход которого через инвертор 29 связан с выходом 1Щ1 скег-и-л 10 пагг равлення.
Регистры 27 и 28 управлзнот рпбо- Toii триггера 30,, сраба 1 -1Г;а;о;пего толъ ко нри подъезде тележки еб ьекта.под- лелсащего взве1ппванию Осиость телен- Ы определяется счстчикои 31 осей тележек э ВЬЕ-:ОД;Л которого ключевую 32 по Тележ-- ка въехала (TI3) поступают в блок 8 обработки,
Гашение счетчика 3 ироизводитс;; при иодъезде о-1;еред 1ОЙ теле;кки диф- , ференцнруюгцей ценочкой К,Л п черея ключ 33
Ilpeдлaгae EЫЙ способ иредпазиачел для подавления помех; кызнипемын ле- рерасиределением осевых nari-vyaoK из-за неровностей ггути,
З стройство 3 реал яэуюи .ее способ j работает при взвеш шалшп. например, четырехос1 ого объетста,,, след.у-аии;-.; образом.
При наезде нервьп-.. колесом объекта в biOMCHT времени на один из путевых дггтчиков, например на датчик 125 нри движении снрава налево (фтлЛ) срабатывает н -пг;ний (фнг .2) тригге) - повторитель 19 и триггер 22 левого направления.. В гггоге на В :гхода;х схемы 10 напраипения () появляется сиг нал Л (Движение левое ) . Щ тевому датч;- су 12 нрнс:занг.гаетсл наименование ПД1 j а нутсоому дат:лл- ку 1 1 -- наименование ПД2 ia все .время взвешилання состава , сброса (вручную ьши автоматически) 1C направления сигналом С,
Работа блока 9 идепти(Ьикаци1; (.3) пояс1-н;ется с помогц-ю вре;.. енных днаграмм (ф.пг.4).
В
момент времени i; ззторпчно ера
батывает- дггтчнк 12 (ПД1) i на выхо.де регистра 28 подъезда (фиг,3) формн- pyeTCii сигнал СП. (Тележка нодъеха- ла) , В момент с., возбуждается так
5
0
.i
открьнич опгий к.пюч 26 и нодготавлнваю- |,ий счетчик 31 осей тале;кек к подсчету наезжа П их осей,; т.е имнулъ- сов И и формируемь Х компаратором 25. Б данном случае„ поскольку наезжает четыигхосньш объект,, то после :Шез ,да и выезда в момент времени с (по- ;;идия По фмГеА) второй оси объекта регистром 27 въезца., фо1)№1руется сиг лал ТВ к код счет чика З равный .;y 2; 14с, осностм тележ.1СИз через открытую ключевую схему 32 постуна- е 1 в блок В обрабэтки,
Иач1-ч ая с .ю :елта времетп; с„, да осность объекта определена, в блоке 8 нроиз:зо;ти1 ся робастная обработка сигнапа, иредназна- етншя для |.Ьл.11Ьтрадт-и нестад онарнь к выбросов, Сбрабо ка снгл;1ло:з всех хстырех осей объекта закончен 1 пос.ле выезда в мо- мен : времени с , хкэследлей, четвер- ; of г оси объекта с весо:;ых ;oдyJзeй 2,- ;:.:iee работа блока 9 ;л1,ентиг В-п :адш ;овтпрлется j как в cмe;:т вре- ;E:Hi 1:. к весовым ьюдулям 2 подъез- :сет следу 31 1,ий объект
Таким образом, с момента воемеш
0
OjiOic у -шоження постз нают результаты по иервой и последуюц нм осям Р; и номе оа осей i
Одновременно H;I. шлпы адреса бло- к:а осевых коэффгщиентов постунагот сиг;:алы Л и II со 10 нанраБле- чнл, 1СОД номера ос;и i и код оспостн гслежю с блока 8 обработк, обесне- чнзая выборку нулевых осевых коэффн- диентов.
чае четырехосиого
50
Л1
55
.г .N, .
- К,,, в cimy и,;гент;:Ч11ост1; расисложепил осей и независимо сч и перераспределения осе- Е;.х усилий вервой н В7 Орой тележек, В начале этсснлуатанин и но мере износа рихтовки H:HI замены железно- д.,рожлого нути П1 снзводят онределе ll осевых коэффнднентов и их за7 12786048
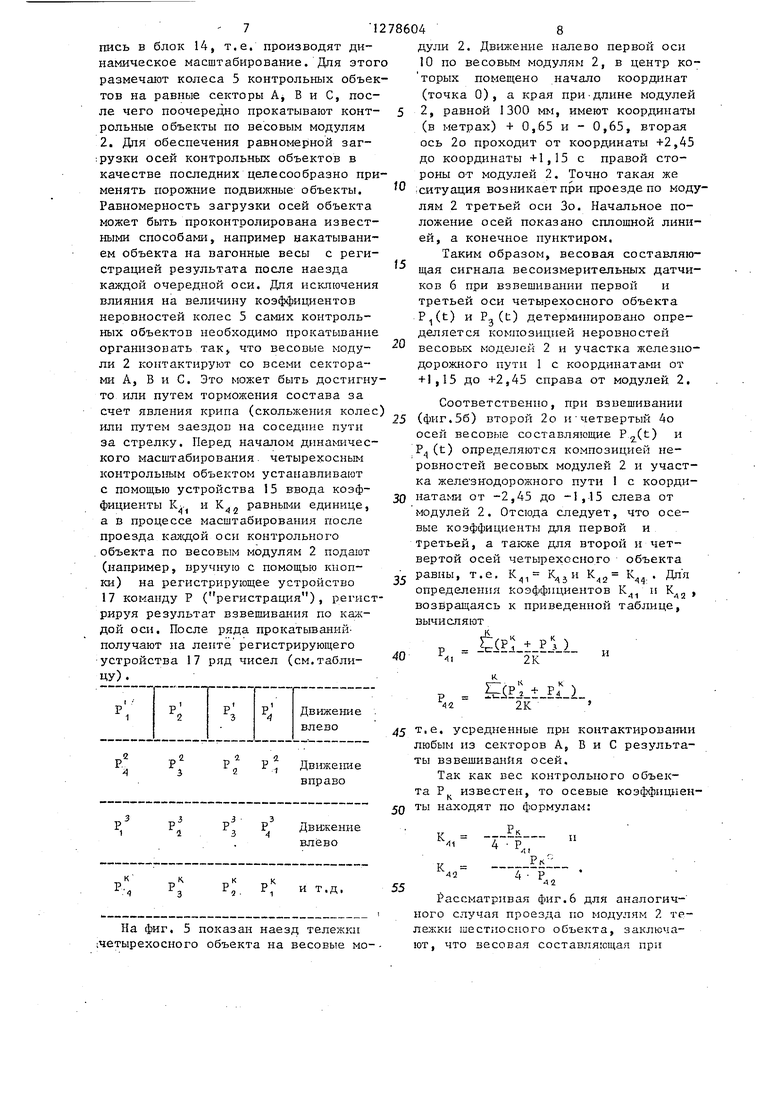
пись в блок 14, т.е. производят ди- дули 2. Движение налево первой оси намическое масштабирование. Для этого 10 по весовым модулям 2, в центр ко торых помещено начало координат (точка 0), а края при-длине модулей 5
размечают колеса 5 контрольных объектов на равные секторы AJ В и С, после чего поочередно прокатывают контрольные объекты по весовым модулям 2. Дпя обеспечения равномерной загФузки осей контрольных объектов в качестве последних целесообразно применять порожние подвижные объекты. Равномерность загрузки осей объекта может быть проконтролирована известными способами, например накатыванием объекта на вагонные весы с регистрацией результата после наезда каждой очередной оси. Дпя исключения влияния на величину коэффициентов неровностей колес 5 самих контрольных объектов необходимо прокатывание организовать так, что весовые модули 2 контактируют со всеми секторами А, В и С. Это может быть достигнуто или путем торможения состава за счет явления крипа (скольжения колес) или путем заездов на соседние пути за стрелку. Перед началом динамического масштабирования, четырехосным контрольным объектом устанавливают с помощью устройства 15 ввода коэффициенты К. 1 42 единице, а в процессе масштабирования после проезда каждой оси контрольного
, объекта по весовым модулям 2 подают (например, вручную с помощью кноп- 1ш) на регистрирующее устройство 17 команду Р (регистращ1я), регистрируя результат взвешивания по дой оси. После ряда прокатываний- получают на ленте регистрирующего устройства 17 ряд чисел (см.таблицу) .
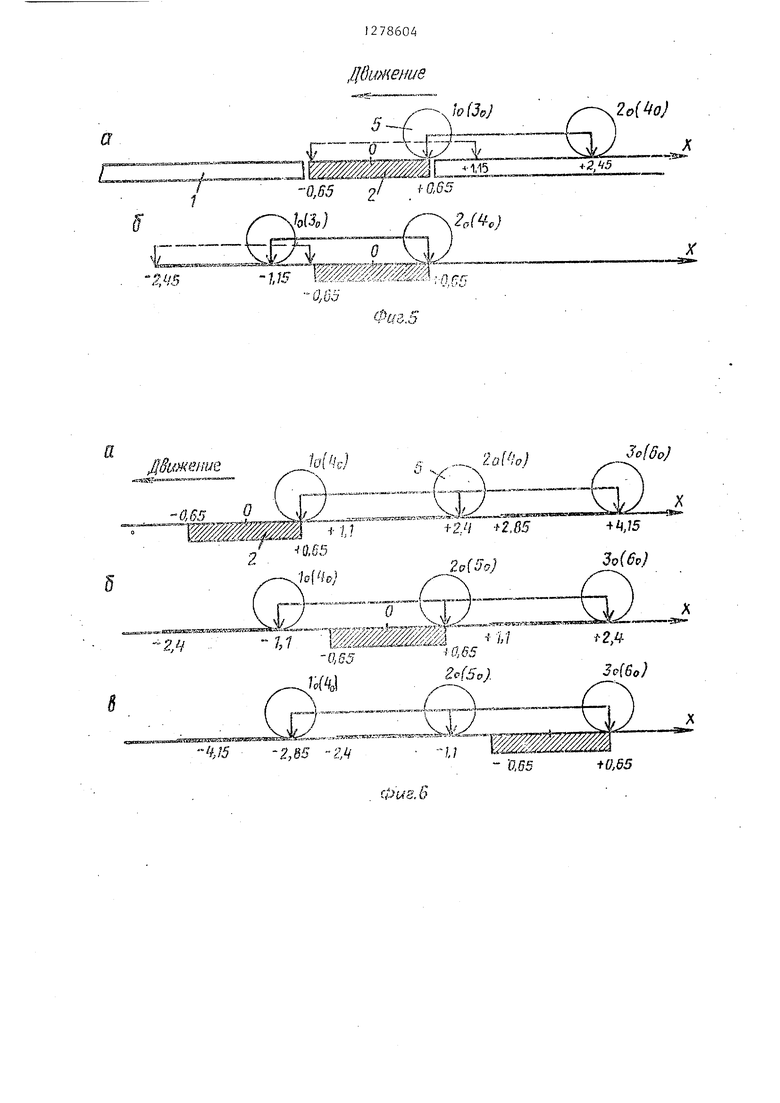
2, равной 1300 мм, имеют координаты (в метрах) 0,65 и - 0,65, вторая ось 2о проходит от координаты +2,45 до координаты +1,15 с правой стороны о-т модулей 2. Точно такая же О ;ситуация возникает при проезде по моду лям 2 третьей оси Зо. Начальное положение осей показано сплошной линией, а конечное пунктиром.
Таким образом, весовая составляющая сигнала весоизмерительных датчиков 6 при B3BemHBainin первой и третьей оси четырехосного объекта P(t) и PJ (t) детерминировано определяется коьпюзицией неровностей весовьЕ-i моделей 2 и участка железнодорожного пути 1 с координатами от +1,15 до +2,45 справа от модулей 2.
5
20
Соответственно, при взвешивании 25 (фиг.56) второй 2о ичетвертый 4о осей весовые составляющие P,2(t) и Р (t) определяются композицией неровностей весовых модулей 2 и участка железнодорожного пути 1 с коорди- 30 натами от -2,45 до -I ,-15 слева от модулей 2. Отсюда следует, что осевые коэффициенты для первой и Третьей, а также для второй и четвертой осей четырехосного объекта равны, т.е. К. К., и К,„ К . . Для
35
40
41 42 4:
определения коэффициентов К и К
42
возвращаясь к приведенной таблице, вычисляют
Р.,
- ).
2К
и
- SP - Е: )
Р.
Движе1ш;е вправо
,3 Движениевлево
Р.,
и т.д.
На фиг. 5 показан наезд тележки ;четырехосного объекта на весовые мо- торых помещено начало координат (точка 0), а края при-длине модулей
2, равной 1300 мм, имеют координаты (в метрах) 0,65 и - 0,65, вторая ось 2о проходит от координаты +2,45 до координаты +1,15 с правой стороны о-т модулей 2. Точно такая же ;ситуация возникает при проезде по модулям 2 третьей оси Зо. Начальное положение осей показано сплошной линией, а конечное пунктиром.
Таким образом, весовая составляющая сигнала весоизмерительных датчиков 6 при B3BemHBainin первой и третьей оси четырехосного объекта P(t) и PJ (t) детерминировано определяется коьпюзицией неровностей весовьЕ-i моделей 2 и участка железнодорожного пути 1 с координатами от +1,15 до +2,45 справа от модулей 2.
Соответственно, при взвешивании (фиг.56) второй 2о ичетвертый 4о осей весовые составляющие P,2(t) и Р (t) определяются композицией неровностей весовых модулей 2 и участка железнодорожного пути 1 с коорди- натами от -2,45 до -I ,-15 слева от модулей 2. Отсюда следует, что осевые коэффициенты для первой и Третьей, а также для второй и четвертой осей четырехосного объекта равны, т.е. К. К., и К,„ К . . Для
41 42 4:
определения коэффициентов К и К
42
возвращаясь к приведенной таблице, вычисляют
Р.,
- ).
2К
и
-12
- SP - Е: )
2К
45 т.е. усредненные при контактироватши любым из секторов А, В и С результаты взвешивания осей.
Так как вес контрольного объекта Р известен, то осевые коэффициен50 ты находят по формулам:
К..
РЛ 4 Р.
К..
42
Рассматривая фиг.6 для аналогич- ного случая проезда по модулям 2 те- лея;ки объекта, заключают, что весовая составляющая при
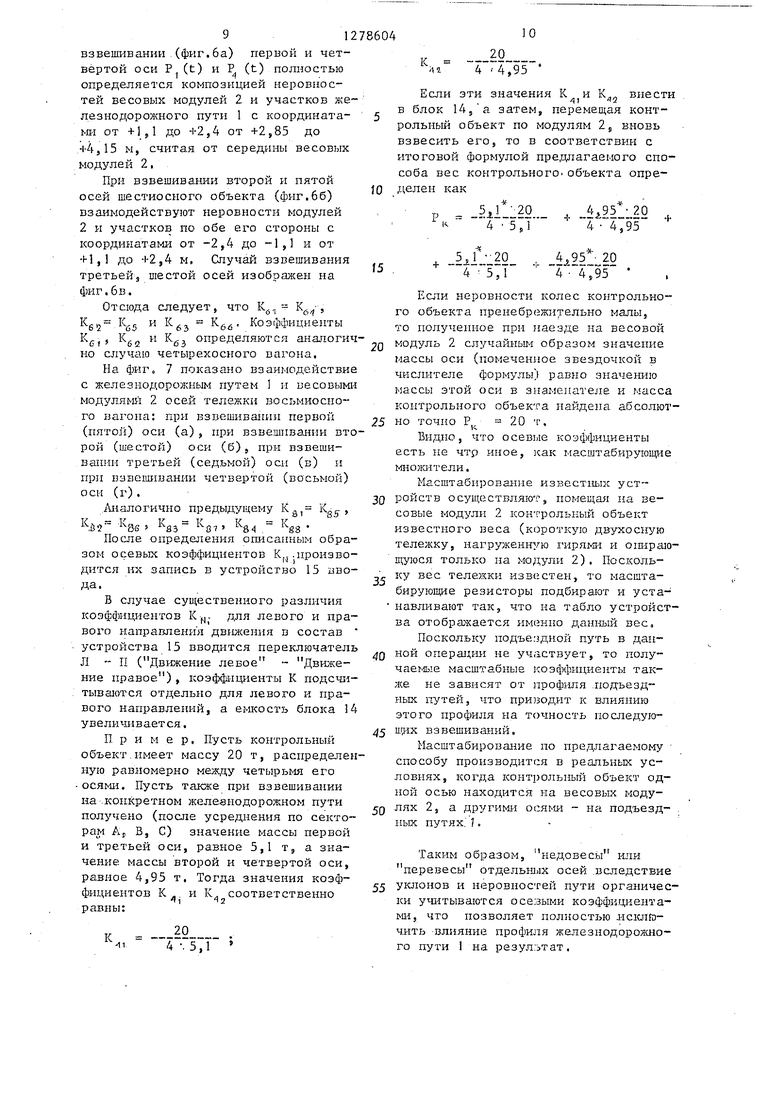
взвешивании (фиг.6а) первой и четвертой оси Р(t)
и Р (t) полностью
определяется композицией неровностей весовых модулей 2 и участков лсе- лезнодорожного пути 1 с координата- ш от +1,1 до +2,4 от +2,85 до 4,15 м, считая от середины весовых одулей 2,
При взвешивании второй и пятой сей шестиосного объекта (фиг.66) взаимодействуют неровности модулей 2 и участкозз по обе его стороны с координатами от -2,4 до 1,1 и от +1,1 до +2,4 м. Случай взвешивания третьей, шестой осей изображен на фиг.бв.
Отсюда следует,
что К, К,-, Kg2 и Kgj - 66 Коэффициенты
К зз огфбД ляются аналогично .ю четырехосного вагона.
На фиг. 7 показано взаимодействие с железнодорожным путем 1 и весовыми МОДУЛЯМ 2 осей тележки восьмиосно- го вагона; при взвешивании первой (пятой) оси (а) , при BSBemnBaiiiiH второй (шестой) оси (6)5 при взвешивании третьей (седьмой) оси (в) и при взвешивании четвертой (восьмой) оси (г).
Малогично предыдущему Кд, Kg ,
%2 %е аъ вт а- . ез
После определения описанным образом осевых коэффициентов К.производится их запись в устройство 15 иво- да.
В случае существенного различия коэф лщиентов К,,. для левого и правого направления двилсения в состав устройства 15 вводится переключатель Л П (Движение левое - Движение правое), коэффициенты К подсч11- тываются отдельно для левого и правого направлений, а емкость блока 4 увеличивается.
П р и м е р, Пусть контрольный объект,имеет массу 20 т, распределенную равномерно меж,цу четырьмя его осями. Пусть также при взвешившши на .конкретном железнодорожном пути получено (после усреднения по секторам Ар В, С) значение массы первой и третьей оси, равное 5,1 т, а значение массы второй и четвертой оси, равное 4,95 т. Тогда значения коэф- фициеь тов К. и К соответственно равны:
К
-11
20
4 5 ;т
к
Л г
20
,95
Если эти значения К и К,
внести
f f - jC
в блок 14, а затем, перемещая контрольный объект по МОДУЛ51М 2, вновь взвесить его, то в соответствии с итоговой формулой предлагаемого способа вес контр,ольного. объекта определен как
Р.
.. .
5.1
4 4,95
5лГ.
4,95 20 4 4795
4 5,1
Если неровности колес контрольного объекта пренебрежительно малы, то полученное при иаезде на весовой
модуль 2 случайньш образом значение массы оси (помеченное звездочкой в числителе формулы) равно значению массы этой оси в знаменателе и масса контрольного объекта найдена абсолютно точно Р 20 т.
гч.
Видно, что осевые коэ(1)(1)ициенты есть не чтр иное, 1сак масштабируюш ие множа-ггели.
Масштабирование известнь х уст-
ройств осуш;естБляют, помещая на весовые модули 2 контрольный объект известного веса (короткую дв ухосную тележку, нагруженную гирями и oin-ipaio- шуюся только на модули 2). Поскольку вес тележки известен, то 1.1асшта- бирующие резисторы подбирают и уста- навливают так, что на табло устройства отображается именно вес. Поскольку подъездной путь в данной операции не участвует, то полу- масштабные коэфеЪициенты так- лсе не зависят от профиля ,подьезд- ных путей, что приводит к влиянию этого профиля на точность последуюигих взвешиваний.
Масштабирование по предлагаемому - способу производится в реальных условиях, когда контрольный объект одной осью находится на весовых модулях 2, а ДРУГИМ.И осями на подъезд- , ных путях, К Таким образом, недовесы или перевесы отдельных осей ,вследствие 55 уклонов и неровностей пути органически учитываются осевыми коэффкгдиентачить влияние профиля железнодорожного пути на резул.ътат.
При этом важно, что недовесы или перевесы определяются по всей протяженности модулей 2 и соответствующих участков пути I, что исключает статическую йоставляюп ую метрологической асимметрии.
Формула изобретения Способ поосного взвешивапия железнодорожного состава в движении, вклга чающий измерение усилий, действующих на весы, от оси объекта, определение направления движения объекта, предварительное тарировз-ние весов с помощью контрольных обт:1ектов различной осности для определения ;- асштаб;:рую- щих коэффициентов и определение массы взвешиваемого объекта сумм-грова- иием результатов взвешивания его осей, о т л и ч а ю щ и и с я тем, что, с целью повышения точности за счет у2.5еньг.ения влияния помех, )
Ш
15
20
ваемых перераспределением осевых нагрузок 1Г з-за неровностей пути, при тарировании весов колеса контрольных объектов размечают на секторы и производят 1- ногократное перемещение кон.трольнь х объектов по весам так, чтобы они наезжали на весы поочередно все;-ш размеченными секторами колес, и каждый раз производят измерение веса, затем вычисляют значение веса для каждой оси усреднением результатов взвешивания, при наездах осей paзличны u секторами колес и вычисляют осевые коэффициенты для каждого контрольного объекта как результат де.пени я его веса на произведение числа осей на усредненное значение веса оси, при перемещении по вeca взвешиваемого объекта определяют его ocFocTb, а результаты взвеп:иЕаи.и;1 осей умножают на осевые коэффи;;иепты.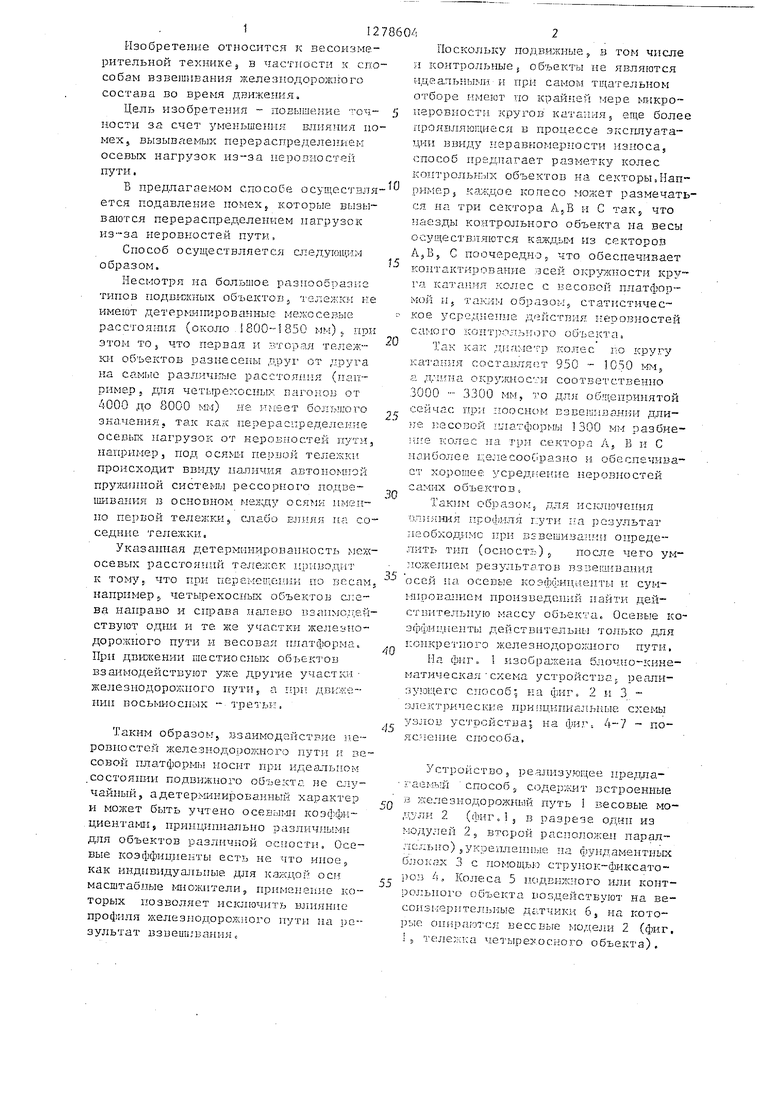
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ поосного взвешивания железнодорожных вагонов в движении | 1989 |
|
SU1749719A1 |
| Способ поосного взвешивания объектов железнодорожного состава в движении | 1987 |
|
SU1425465A1 |
| Устройство для поосного взвешивания железнодорожного состава в движении | 1984 |
|
SU1229586A1 |
| Способ поколесного взвешивания подвижных объектов | 1990 |
|
SU1781553A1 |
| СПОСОБ ПОЭЛЕМЕНТНОГО ВЗВЕШИВАНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ОБЪЕКТОВ | 2002 |
|
RU2239799C2 |
| Устройство для взвешивания подвижных объектов | 1987 |
|
SU1432341A1 |
| Устройство для поосного взвешивания вагонов в движении | 1982 |
|
SU1076769A1 |
| СПОСОБ ВЗВЕШИВАНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ОБЪЕКТОВ | 2012 |
|
RU2507486C1 |
| СПОСОБ ВЗВЕШИВАНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2390735C1 |
| Устройство для взвешивания железнодорожного подвижного состава | 1984 |
|
SU1234728A1 |

Изобретение относится к весоизмерительной технике и позволяет повысить точность за счет уменьшения влияния помех, вызываемых перераспределением осевых нагрузок из-за неровностей пути. В начале процесса взве- ишвания с помощью контрольных объектов известного веса определяют и вводят в 6JLOK 14 осевых коэффициентов (БОК) ьшожители, уштываюиц ш про- фшть подъездных путей.. При вззешива-., НИИ подвижных объектов (ПО) по определяемым блокам 9 идентификации и блоком 8 обработки сигналам оспос- ти ПО и ,}юмарам осей осевые коэф( циенты изштекают из БОК 14 и подают на блок 13 умножения, что обеспечивает нахождение дпя сумматора 16 уточненных значений масс осей, Ито- гоБьш вес ПО регистрируется устройством 17. 7 ил. я Г-Jf. / Lkf™ 1 Р t tff. BRiiST оо 0t) О л . /г йие./
/-ж
llinpaBoe}
nrsBKi
А{ле8ое) с
(cffpoc)
Фиг. 2
т
Фиг.З
Ддьшение
:1,Ч5
2, i5
X
Зо1бо)
Составитель В.Ширшов Редактор Н.Бобкова Техред Л. Сердюкова
Заказ 6820/35 Тираж 705Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
-ass
Q.BS
Корректор С.Шекмар
| 0 |
|
SU236052A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ динамического взвешивания | 1983 |
|
SU1177683A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
