управления направлением счета, а вход сброса - с выходом формирователя импульса сброса, второй вход которого подключен к другому выходу датчиков обратной связи, второй информационный эход мул ьтиплексора соединен с выходом первого сумматора, а выход - с вторь информацаонным входом блока формирования команд упреждения, причем выход Равно блока сравнения подключен к входу элемента ЗАПРЕТ, а выход торого сумматора - к второму входу первого сумматора.
2.Устройство по п. 1, о т л иа ю щ е е с я тем, что блок управения направлением счета содержит первый, второй, третий, четвертый пятый элементы 2И-НЕ, элемент ЛЙ-НЕ и триггер, вход установки в 1 которого соединен с вьтходом первого элемента 2Й-НЕ и с входом втоого элемента 2И-НЁ, вход установки в О - с выходом второго элемента 2И-НЕ, единичный выход - с входом третьего элемента 2Й-НЕ, нулевой выход - с входом четвертого элемента 2И-НЕ, причем первый вход блока соединен с первым входом первого элемента 2И-НЕ и вторым входом второго элемента 2И-НЕ, второй вход с вторыми входами первого и третьего элементов 2И-НЁ и через элемент ИЛИ-НЕ - с вторым входом четвертого элемента. 2И-НЕ, а выход блока подключен к выходу пятого элемента 2И-НЕ, входыкоторого соединены с выходами третьего и четвертого элементов 2И-НЕ.
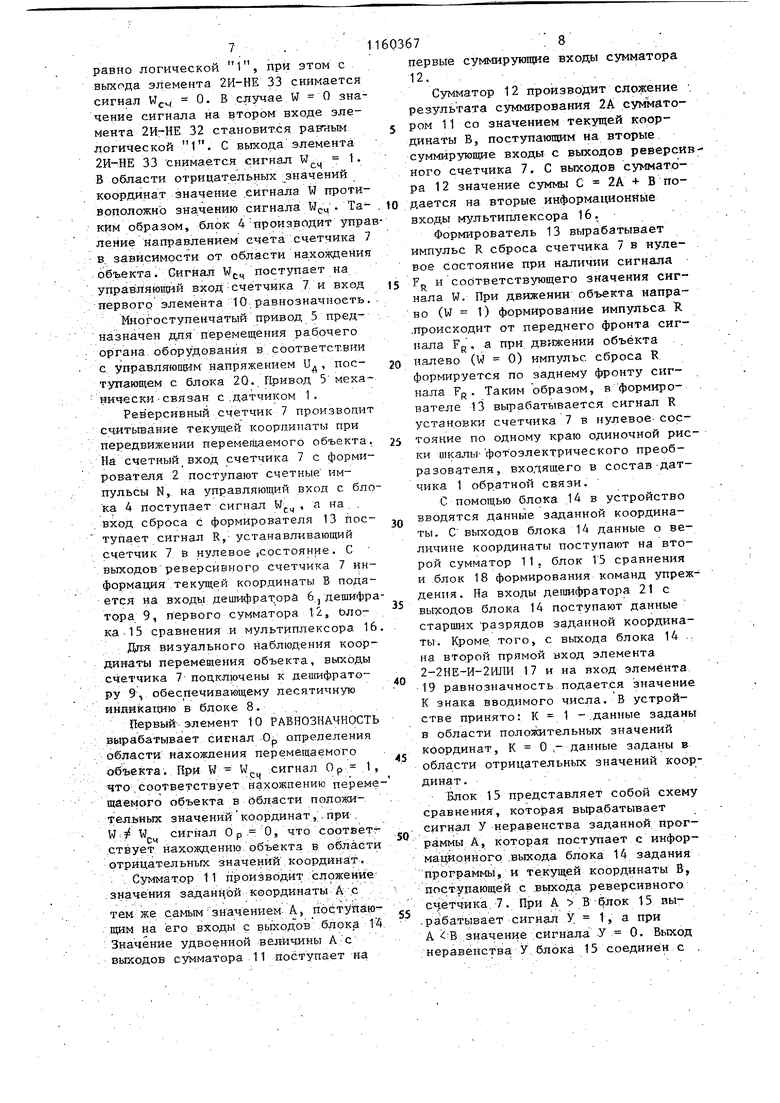
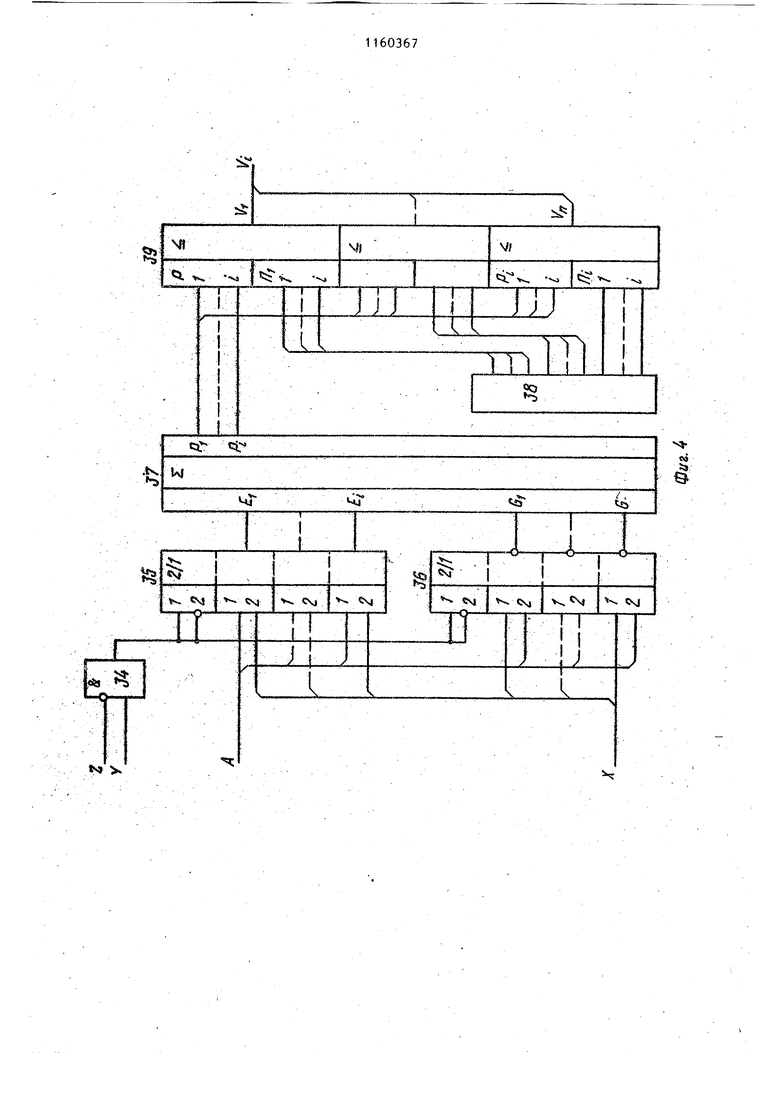
3.Устройство по п. 1, о т л ичающееся тем, что блок формирования команд упрсяодения содержит длемент ЗАПРЕТ, первый мультиплексор с прямыми выходами, второй
мультиплексор с инверсными выxoдa ш, программный задатчик,. п-схем сравнения и сумматор, первые входы которого соединены с выходами первоТо мультиплексора, вторые входы - с выходами второго мультиплексора, а выходы - с первыми входами .п-схем сравнения, первый управляющий вход блока соединен с управляющим входом элемента ЗАПРЕТ, второй управляющий вход - с входом элемента ЗАПРЕТ, первый информационный вход - с первыми входами первого мультиплексора и с вторыми входаьда второго мультиплексора, второй инфор 1ационный вход - с вторыми входамипервого мультиплексора и с первыми входами второго мультиплексора, а выход блока соединен с выходами схем сравнения , причем выходы программного задатчика подключены к вторым входам п-схем сравнения, а выход элемента ЗАПРЕТ подключен к управляющим входам мультиплексоров.
4. Устройство по п. 1, о т л ич а ю щ е е с я тем,что блок определения направления движения содерзкит два элемента 2-2-2-2И-4ИЛИ и триггер, входы установки в 1 и в О которого подключены к выходам первого и второго элементов 2-2-2-2И-4ИЛИ соответственно, а единичный выход - соединен с выходом блока, причем входы элементов 2-2-2-2И-4ИЛИ соединены с входами блока и попарно объединены между собой так, что первый вход перв.ого элемента 2-2-2-2И-4ИЛИ соединен с первым входом второго элемента 2-2-2-2И-4ИЛИ, второй вход - с пятым входом, третий вход - с третьим входом, четвертый вход - с седьмым входом, пятый вход - с четвертым входом, а восьмой вход - с вос:ьмым входом.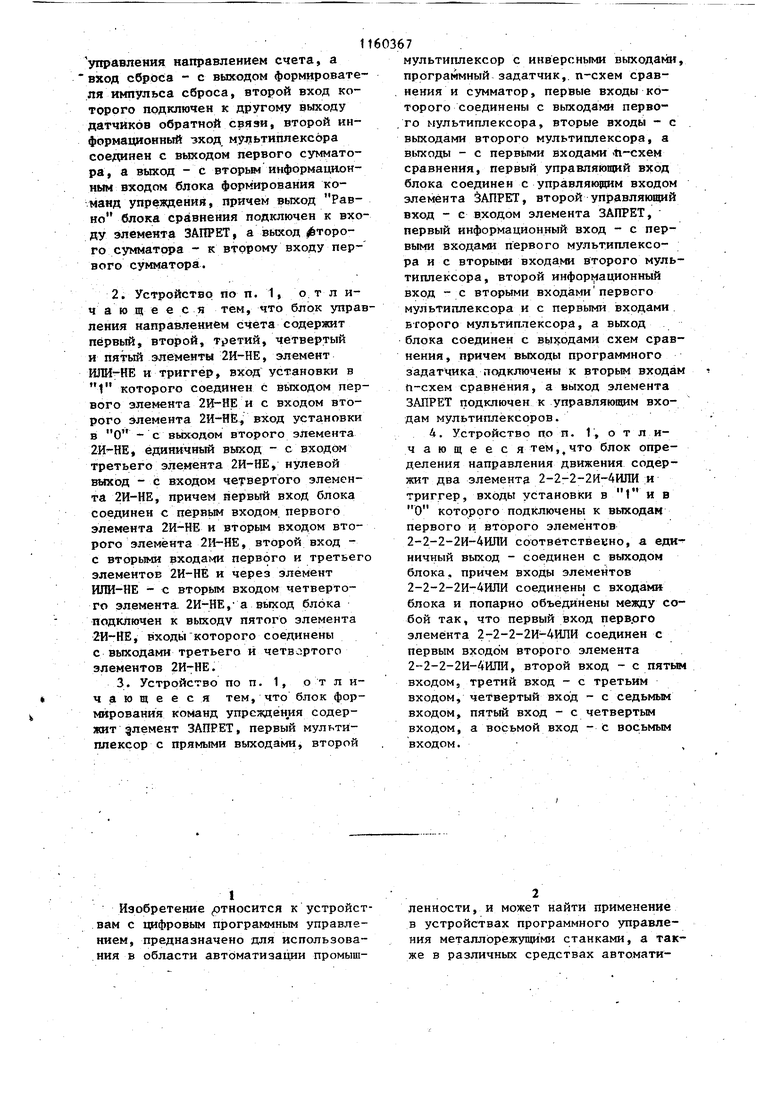
| название | год | авторы | номер документа |
|---|---|---|---|
| Счетно-импульсное устройство для программного управления объектом с К-ступенчатым остановом | 1981 |
|
SU1007085A1 |
| Круговой интерполятор | 1988 |
|
SU1566321A1 |
| Швоуловитель | 1982 |
|
SU1060725A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И САМОНАВЕДЕНИЯ | 2010 |
|
RU2439608C1 |
| Устройство для вычисления элементарных функций | 1980 |
|
SU940155A1 |
| Устройство для контроля монтажа | 1984 |
|
SU1211672A1 |
| Устройство для программного управленияСТАНКОМ | 1977 |
|
SU805259A1 |
| Устройство для управления электродвигателем постоянного тока | 1978 |
|
SU765964A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 2008 |
|
RU2375817C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПОЛЯ ЛАЗЕРНОЙ СИСТЕМЫ ТЕЛЕОРИЕНТАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2099730C1 |
Г. yCTPOffcTBO ДЛЯ ПРОГРАММНОГО ШРАВЛЕЙЙЯ, содержащее блок управления приводом, подключенный к приводу, последовательно соединенные датчик обратной св;язи, формирователь импульсов,блрк определения направления движения, а также реверсивный счетчик, счетный вход ко арого подключен к другому выходу фop шpoвaтeля импульсов, а вьпсод к входам дешифратора текущей координаты, соединенного с блоком индикации, и блок сравнения, подключенный входом к информационному выходу блока зада;ния программы, а выкодом - к управлякА1ему входу блока формирования команд упреждения, о т л и чаю щ е е с я тем, что, с целью расширения области применения устройства, в него введены формирователь импульса сброса, мультиплексор, .первый и второй сумматоры, дешифраторы нуля и старших разрядов, последовательно соединенные блок управления направлением счета и первый и второй элементы РАВНОЗНДЧНОСТЬ, элемент ЗАПРЕТ, элемент 2-2Н|Е-И-2ШТИ и коммутатор, информационный вход которого соединен с выходом блока формирования команд упреяздения, первый управляющий вход - с выходом второго элемента РАВНОЗНАЧНОСТЬ и с управляювщми входами мультиплексора, элемента 3MIРЕТ и блока формирования команд . упреждения, второй управляющий вход - с выходом дешифратора старttox разрядов, а выход - с информационным входом блока управления приводом, входами останова и реверса подключенного к выходам элементов ЗАПРЕТ и 2- 2НЕ-И-2ИЛИ, первый инверсный вход элемента 2-2НЕ-И-2ИЛИ соединен с выходом первого элемента 3 РАВНОЗйАЧНОСТЬ, второй инверсный СП и первый прямой входы объединены между собой и соединены с выходом с блока сравненья, а второй прямой вход соёдйнед с другим входом второго элемента РАВНОЗНАЧНОСТЬ и со знаковым выходом блока задания программы, информацийняый выход которого подключён к входам второго сум- о матора, к первому информационному о входу блока формирования команд уп- оэ реждения и к входу дешифратора стар-, О) ших разрядов, вькод реверсивного счетчика соединен с первым входом первого сумматора, с первым информационным входом мультиплексора и через дешифратор нуля с первым входом блока управления направлением счета, второй вход которого подключен к эыходу блока определения направле- : ния движения, к другому входу перво- , го элемента РАВНОЗНАЧНОСТЬ и первому входу формирователя импульса сброса, управляющий вход реверсивного счетчика соединен с выходом блока
1
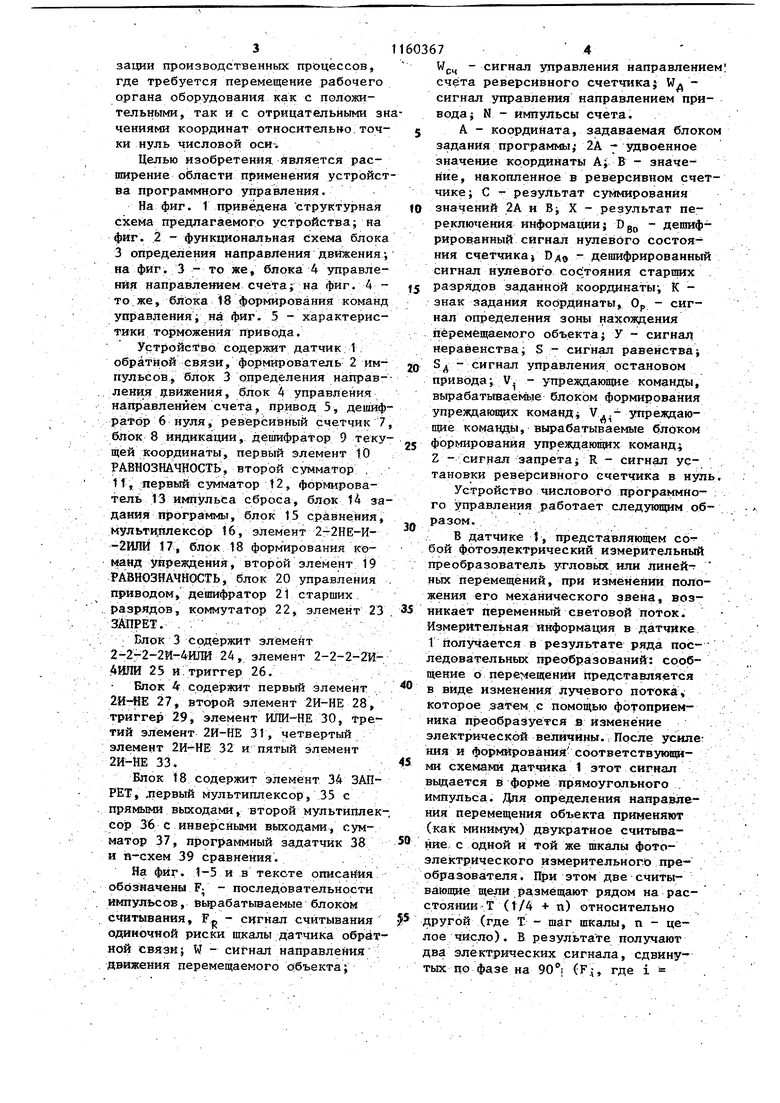
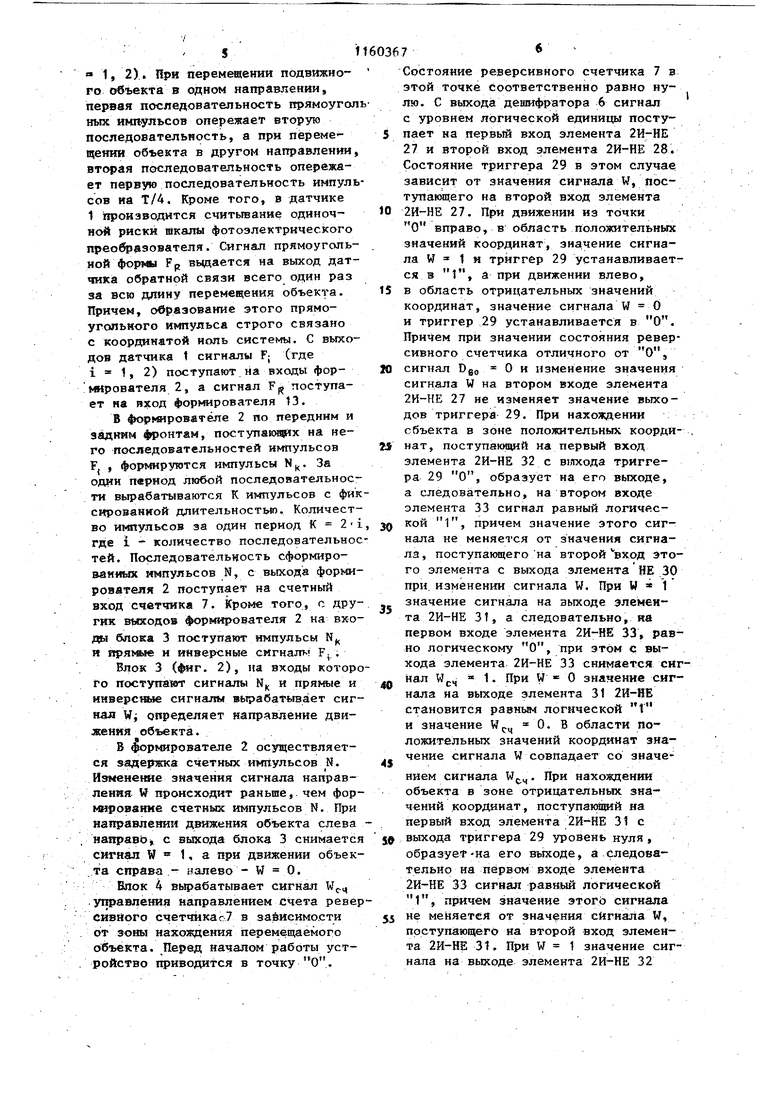
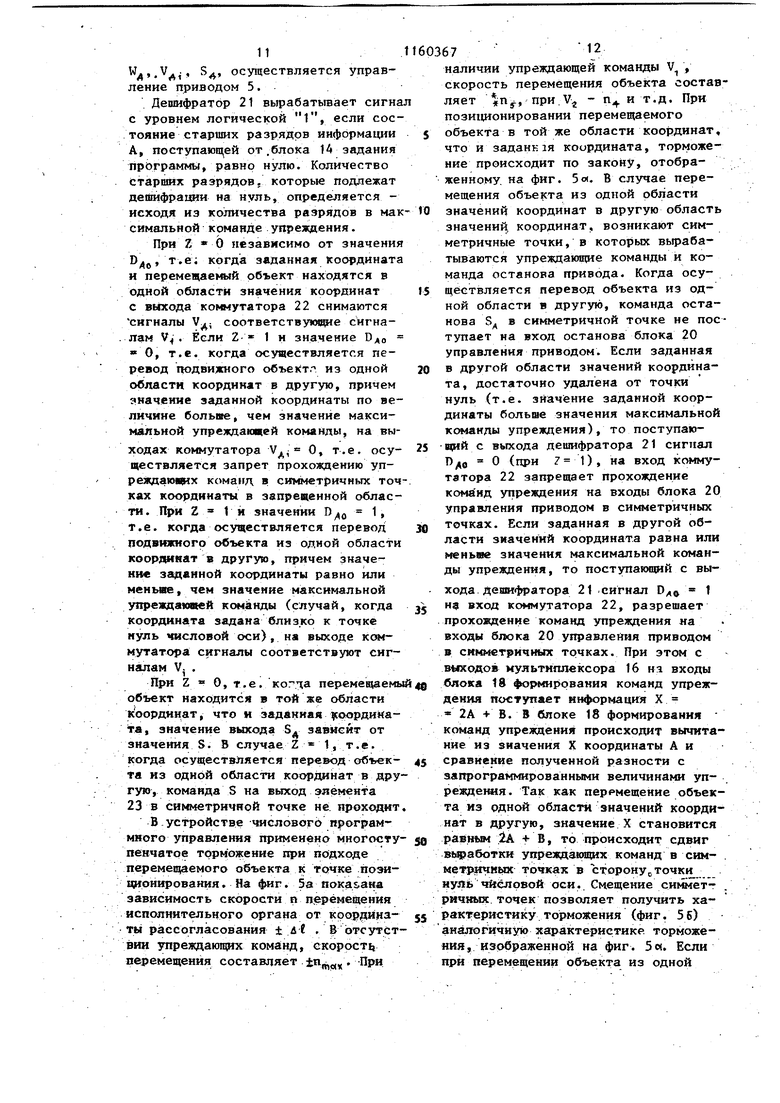
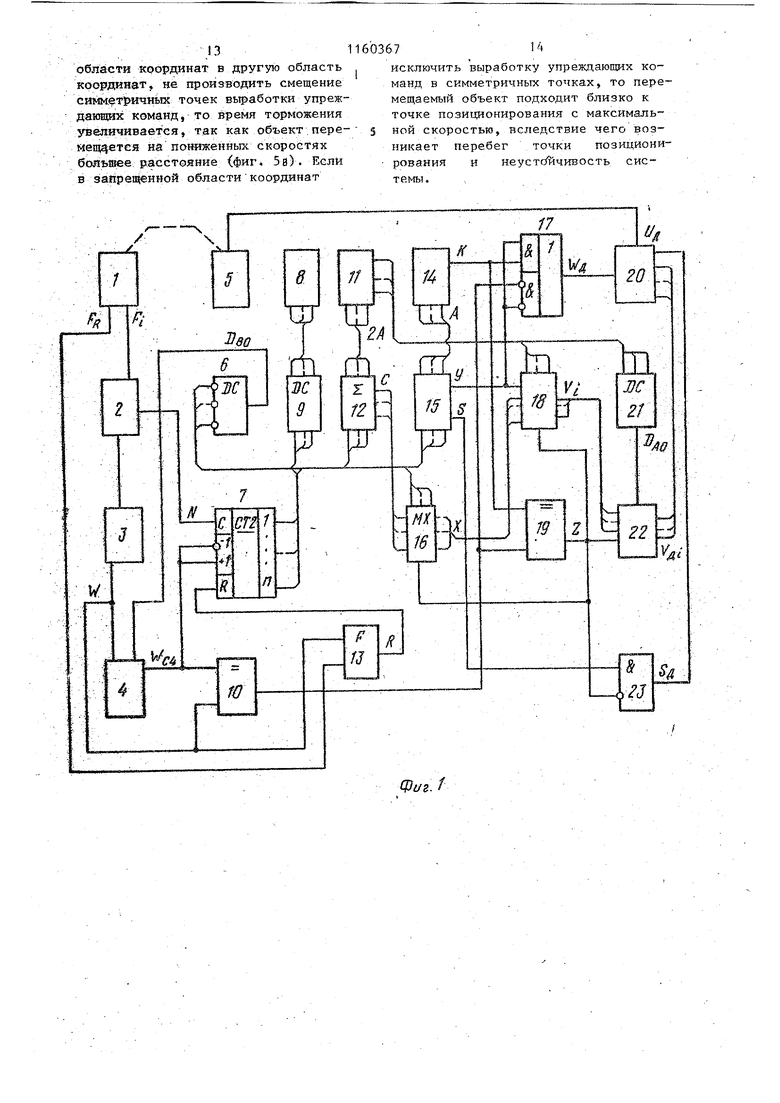
Изобретение этносится к устройствам с цифровым программным управлением, предназначено для использова.ния в области автдматизации промышленности, и может найти применение в устройствах программного управления металлорежущими станками, а также в различньгх средствах автоматизации производственных процессов, где требуется перемещение рабочего органа оборудования как с положительными, так и с отрицательными зн чениями координат относительноГточки нуль числовой оси-. Целью изобретения является расширение оЬласти применения устройст ва программного управления. На фиг. 1 приведена структурная схема предлагаемого устройства; на фиг. 2 - функциональная Схема блока 3 определения направления движения на фиг. 3 - то же, блока 4 управления направлением счета; на фиг. 4 то же, блс1ка 18 формирования команд управления; на фиг. 5 - характеристики торможений привода. Устройство содержит датчик 1 обратной связи, формирователь 2 импульсов j блок 3 определения направления движения, блок 4 управления напр авленйем счета, привод 5, дешиф ратор 6 нуля, реверсивный счетчик 7 блок 8 индикации, дешифратор 9 теку щей координаты, первый 10 РАВНОЗНАЧНОСТЬ, второй сумматор . 11, первый сумматор 12, формирователь 13 импульса сброса, блок 14 за дания программ, блок 15 сравнения, йульти.плексор 16, элемент 2т2НЕ-И 2ИЛИ } 7, блок 18 формирования команд ун| еждения , второй элемент 19 РАВНОЗНАЧНОСТЬ, блок 20 управления приводом, дешифратор 21 старших разрядов, KOMMyTatop 22, элемент 23 .:ЗАПРЕТ.- .,.; - .,;; . - - ,, Блок 3 содержит элёмейт 2-2г2-2й-4ШШ 24, элемент 2-2-2-2И4ИШ 25 и. триггер 26. Елок 4 содержит первый элемент 2И-ЙЕ 27, второй элемент 2И-НЕ 28, триггер 29, элемент ЙЛИ-НЕ 30, третий элемент 2И-НЕ 31, четвертый элемент 32 и пятый элемент 2И-НЕ 33. Блок 18 содержит элемент 34 ЗАПРЕТ, .первый мультиплексор, 35 с прямыми выходами, второй мультиплек сор 36 с инверсными выходами, сумматор 37, программный задатчик 38 и п-схем 39 сравнения. На фиг. 1-5 и в тексте описаййя обозначены F- - последовательности импульсов, бырабатьшаемые блоком считывания, FU - сигнал считывания одиночной риски щкалы датчика обрат ной связи; W - сигнал направления движения перемещаемого объекта; 67 Р - сигнал управления направлением; счета реверсивного счетчика; W сигнал управления направлением привода; N - импульсы счета, А - координата, задаваемая блоком задания программы, 2А 7 Удвоенное значение координаты А; В - значение, накопленное в реверсивном счетчике; С - результат суммирования значений 2А и В; X - результат переключения информации ; Dgp - дешифрированный сигнал нулевого состояния счетчика $ D до - дешифрированный сигнал нулевого состояния старщих разрядов заданной координаты-, К знак задания координаты, Ор - сигнал определения зоны нахождения перемещаемого объекта; У - сигнал неравенства; S - сигнал равенства; Зд - сигнал управления остановом привода; V, - упреждающие команды, вырабатывае№1е блоком формирования упреждающих команд; V,- упреждающие команды, вырабатываемые блоком формирования упреждающих команд; Z - сигнал запрета; R - сигнал установки реверсивного счетчика в нуль. Устройство числового Программно- , . го управления работает следз щим образом. ;. В датчике J, представляющем с6бой фотоэлектрический измерительный преобразователь угловых или линей-т ных перемещений, при изменении положения его механического звена, возникает переменный световой поТок. Измерительная информация в датчике. 1 получается в результате ряда пос- ледовательных преобразований: сообщение 6 перемещении представляется в виде изменения Лучевого потока у которое затем с помощью фоТоприемника преобразуется 8 изменение электрической величины. После усилв ния и формирования соответствующими схемами датчика 1 этот сигнал выдается g форме прямоугольного , импульса. Для определения направления перемещения объекта применяют (как минимум) двукратное считывание/ с одной и той же шкалы фотоэлектрического измерительного преобрззоватгеля. При этом две считывающие щели размещают рядом на расстоянии Т (1/4 + п) относительно другой (где Т - шаг шкалы, п - целое ч:йсло) , В результате получают два электрических сигнала, сдвинутьк по Фазе на (, где i . « 1,2). При перемещении подвижного объекта в одном направлении, первая последовательность прямоугол ных импульсов опережает вторую последовательность, а при перемещении объекта в другом направлении вторая последовательность опережает первую последовательность импуль сов на Т/4. Кроме того, в датчике 1 производится считывание одиночной риски шкалы фотоэлектрического прео цзователя. Сигнал прямоугольной FP вццается на выход датчика обратной связи всего один раз за всю длину перемещения объекта. Причем, образование этого прямоугольного импульса строго связано с координатой ноль системы. С выходов датчика 1 сигналы FJ (где i 1, 2) поступают на входы фор «рователя 2, а сигнал F, поступает на яход фор в1рователя 13. В формирователе 2 по передним и задним фронтам, поступаю х на него последовательностей иктульсов F , формируются импульсы N,. За один период любой последовательнос ти вырабатываются К импульсов с фи сированной длительностью. Количест во И1шульсов за один период К 2 где i - количество последовательно тей. Последовательность сформированных импульсов N, с выхода форьш рователя 2 поступает на счетный вход счетчика 7. Кроме того, с дру гцк выходов формирователя 2 на вхо ды блока 3 поступани- импульсы Nj и иря1Ф}е и инверсные сигналы F . Блок 3 (фиг. 2), на входы котор го поступаит сигналы N, и и инверсш 1е сигналы вьтрабатывает сиг нал Wi определяет направление двилсенйя объекта. В формирователе 2 осуществляется задержка счетных имПульсов N. Иэт ене1Ше значения сигнала направления W происходит раньше, чем фор кюрование счетных импульсов N. При направлении движения объекта слева направь, с выхода блока 3 снимаетс сигнал W 1, а при движении объек та справа - налево - W 0. Блок 4 вырабатывает сигнал W. управления направлением счета реве сивйого счетчикас в заёисимости от зоны нахождения перемещаемого объекта. Перед началом работы устройство приводится в точку О. Состояние реверсивного счетчика 7 в этой точке соответственно равно нулю. С выхода дешифратора 6 сигнал с уровнем логической единицы поступает на первьШ вход элемента 2И-НЕ 27 и второй вход элемента 2И-НЕ 28. Состояние триггера 29 в этом случае зависит от зиаче{|ия сигнала W, поступакнцего на второй вход элемента 2И-НЕ 27. При движении из точки О вправо, в область положительных значений координат, значение сигнала W 1 и триггер 29 устанавливается в 1, а при движении влево, в область отрицательных значений координат, значение сигнала W 0 и триггер 29 устанавливается в О. Причем при значении состояния реверсивного счетчика отличного от О, сигнал Dg5 О и изменение значения сигнала W на втором входе 2И-НЕ 27 не изменяет значение выходов триггера 29. При нахождении объекта в зоне положительных координат, поступающий на первый вход элемента 2И-НЕ 32 с В1.лхода триггера 29 О, образует на его выходе, а следовательно, на втором входе элемента 33 сигнал равный логической 1, причем значение этого сигнала не меняется от значения сигнала, поступающегона второйвход этого элемента с выхода элемента НЕ 30 при изменении сигнала W. При W 1 значение сигнала на выходе элемента 2И-НЕ 31, а следовательно, на первом входе элемента 2И-НЕ 33, равно логическому О, при этом с выхода элемента 2И-НЕ 33 снимается сигнал Wp 1. При W « О знанение сигнала на вь1ходе элемента 31 2Й-НЕ становится равньв логической 1 и значение W. 0. В области положительных значений координат значение сигнала W совпадает со значением сигнала W,. При нахождении объекта в зоне отрицательных значений координат, поступакядай на первый вход элемента 2Й-НЕ 31 с выхода триггера 29 уровень нуля, образует-на его выходе, а следовательно на первом входе элемента 2И-НЕ 33 сигнал равный логической 1, причем значение этого сигнала не меняется от значения сигнала W, поступающего на второй вход элемента 2И-НЕ 31, При W 1 значение сигнала на выходе элемента 2И-НЕ 32 т . , равно логической 1, при этом с выхода элемента 2И-НЕ 33 снимается сигнал Wj-v 0. В случае W 0 значение сигнала на втором входе элемента 2И-НЕ 32 становится рантым логической 1. С выхода элемента 2И-НЕ 33 снимается сигнал W.,. 1. . . . 1-т В области отрицатель11ых значений координат значение .сигнала W противоположно значению сигнала WCM ТаКИМ образом, блок 4производит упра ление направлением счета счетчика 7 в. зависимости от области нахождения объекта. Сигнал W. поступает на управляющий вход-счетчика 7. и вход первого элемента 10 равнозначность. М1{огоступенчатый привод 5 предназначен для перемещения рабочего органа оборудования в.соответствии с. управляюпи м напряжением U , поступающем с блока 20. Привод 5 механически связан с .датчиком 1. Реверсивный счетчик 7 производит считывание текузцей координаты при передвиж.енни перемещаемого объекта. На счетный вход счетчика 7 с формирователя 2 поступают счетн 1е импульсы N,. на управляющий вход с бло ка 4 поступает сигнал W , а на . вход сброса с формирователя 13 поступает сигнал R,- устанавливающий счетчик 7 в нулевое (Состояние. С выходовреверсивного счетчика 7 информация .текущей координаты В подается на входы деи1и 5)ратора 6 . дешифра тора 9, первого сумматора 12, ьлока15 сравнения и мультиплексора 16 Для визуального Наблюдения координаты перемещения объекта, выходы счетчика 7- подключены к дешифратору 9, обеспечивающему десятичную индйкагдаю в блоке 8. Первый--элемент 10 РАВНОЗНАЧНОСТЬ вырабатывает сигнал Ор определения области нахождения перемещаемого объекта.. При W W .сигнал Ор. .1 , то.соответствует . нахожпению переме щаемого объекта в Ьбласти положитель-иых значений координат, .при-. .. сигнал О р . О, что соответг .ствует. нахождению, объекта .в оёласти отрицательных значений .координат. - . Сумматор 11 производит .еложенйезначения заданН/ой Координаты А с тем же самымзначением. А, поетуйан).щим на его входы с вьгходов .блока t4 Значение удвоенной вел-Ичины Ас выходов сумматора , 11 поступает на 67 первые суммирующие входы сумматора 12. . . ... Сумматор 12 произво;дит сложение . результата суммирования 2А сумматором 11 со значением текущей координаты В, поступакгадам на вторые суммирующие входы с выходов реверсивного счетчика 7. С выходов .ора 12 значение С 2А + В подается на вторые информационные входы мультиплексора 16. Формирователь 13 вырабатывает импульс R сброса счетчика 7 в нулевое состояние при наличии сигнала FO и соответствующего значения сигнала W. При движении объекта направо (W 1) формирование импульса R -Происходит от переднего фронта сигнала Fg, а при двилсении объекта налево (W 0) импульс сброса R формируется по заднему фронту сигнала F . Таким образом, в формирователе 13 вырабатывается сигнал R установк г счетчика 7 в нулевое, состояние по одному краю одиночной риски шкалыфотоэлектрического преобразовд.теля, входящего в состав-датчика 1 обратной связи. С помощью блока 14 в устройство вводятся даннБШ заданной координаты. С выходов блока 14 данные о величине координаты поступают на второй Сумматор 11. блок 15 сравнения и блок 18 формирования команд упреждения. На входы дешифратора 21 с выходов блока 14 поступают данные старших разрядов заданной координаты. Кроме, того, с вьгкода блока 14 на второй прямой вход элемента 2-2НЕ-И-2ИЛИ 17 и на вход элемента 19 равнозначность подает.ся значение К знака вводимого числа. В устройстве принято: К 1 -.данные заданы в области положительных значений координат, К 0 - данные заданы в обла.сти отрицательных значений координат . . . Блок 15 представляет собой схему сравнения, которая вырабатывает сигнал У неравенства заданной программы А, которая поступает с инфорMai OHHoro .выхода блока 14 задания программы, и текущей координаты В, поступающей с .вьрсода реверсивного . 7. При А В блок 15 вырабатывает сигнал У 1, а при А В значение сигнала У 0. Выход неравенства У блока 15 соединён с .
.9
входами элемента 2-2НЕ-И-2Ш1И 17 и блока 18 формирования команд упреждения. Кроме того, при А В блок 15 вь5 вбатьгаает сягяал S - останов {фявода, KOTopbrft поступает на элемент 23 запрет.
Мультиплексор 16 осуществляет переключение информации с двух направлений на одно. При значении управл кжего сигнала Z О, с выхода мультиплексора 16 снимается инфорг ация X В, а при Z 1 - X С.
. Если заданная nporpai ia находится в той же области, что и перемещаемый объект Ор К 1 (положительная область координат) то значение вьпсода W зависит от значения сигнала У. При У 1 значение выхода W 1, а при У О значение W 0. Если заданная координата находится в отрицательной облас ти, в той же области, что и перемеа аемый объект Ор К 0, то при У - 1 - W д О, а при У О - W 1. В случае когда перемев(аемый об-ьект находится.в отрицательной области Ср О, а координата задана в положительной области К 1, то вне зависимости от значения сигнала У сигнал W 1, т.е. осуществляется перевод объекта из области отрицательных в область полоясительных значений координат, так как в устройстве принято при W 1 движение объекта осуществляется слева направо, а W О справа налево. Если перемещаемый объект находится в положительной области Ор 1, а координата задана в отрицательной области К О, то вне зависимости от значения сигнала У значение сигнала W. О, т.е. осуществляется перевод .объекта из области положительных в оСласть отрицательных значений коордяиат,
Выходы мультиплексора 35 соединены с входами первого слагаемого сумматора 37, иа входы второго слагаемого поетзшает инверсная информация с выходов второго мультиплексора 36. Ча входе перенос сумматора 37 постоянно 14 ясутствует потенциал с уровнем логической едиНИЩ|1
При Z. О перемещаемый объект находится а той же области координат где и заданная программа. При
16036710
этом значение X В. Если А В, то значение У 1 и с выхода элемента 34 ЗАПРЕТ на управляющие входы мультиплексоров 35 и 36 подается
5 сигнал с уровнем, логической 1J. На выходах мультиплексора 35 и соответственно на входах первого слагаемого сумматора 37 присутствует информация А в прямом коде.
10 а на выходах мультиплексора 36 и, следовательно, на входах второго слагаемого сумматора 37 присутствует инф(мац11Я В в инверсном коде. Так как в сумматоре 37 происJ5 ходит сложение большего числа А в
прямом коде с .меньшим числом В в инверсном коде и единицей переноса, то это означает, что в сумматоре происходит операция вычитания из
20 числа А число В и результат на его выходе Отображен в прямом коде. При В А значение У О и на входах сумма/ора 37 присутствует информация 1Ч1сла В в прямом коде и числе А в
25 инверснс коде. В сумматоре происходит операция В-А. При-Z 1 значение X 2А - В, на входах сумматора 37 присутствует информация числа X в прямом коде и числа А в инверсном
30 коде. В сумматоре 37 происходит вычитание из значения X числа А. Результат операции вычитания с выходов сумматора подается на первые входы схем 39 сравнения, на сравнивакяие , входы которых с выходов программного задатчика 38 подаются программируемые величины сравнения. При значении результата операции вычитания больше значения запрограммируемых
величин, с выходов схем 39 сравнения снимаются сигналы с уровнем логичес-г кого О, а при значении результата операции вычитания равно или меньше значения сравнивающих величин с ходов схем 39 снимаются сигналы с уровнем логической 1.
Если перемещаемый объект находится в заданной области Ор К, то с выхода элемента 19 РАВНОЗНАЧНОСТЬ ,
-Q снимается сигнал с уровнем логического нуля. При нахождении перемещаемого объекта в .одной области координат и задания коозрдинаты в другой области (Ор К), с выхода элемента 19 РАВНОЗНАЧНОСТЬ снимается сигнал с уровнем логической 1.
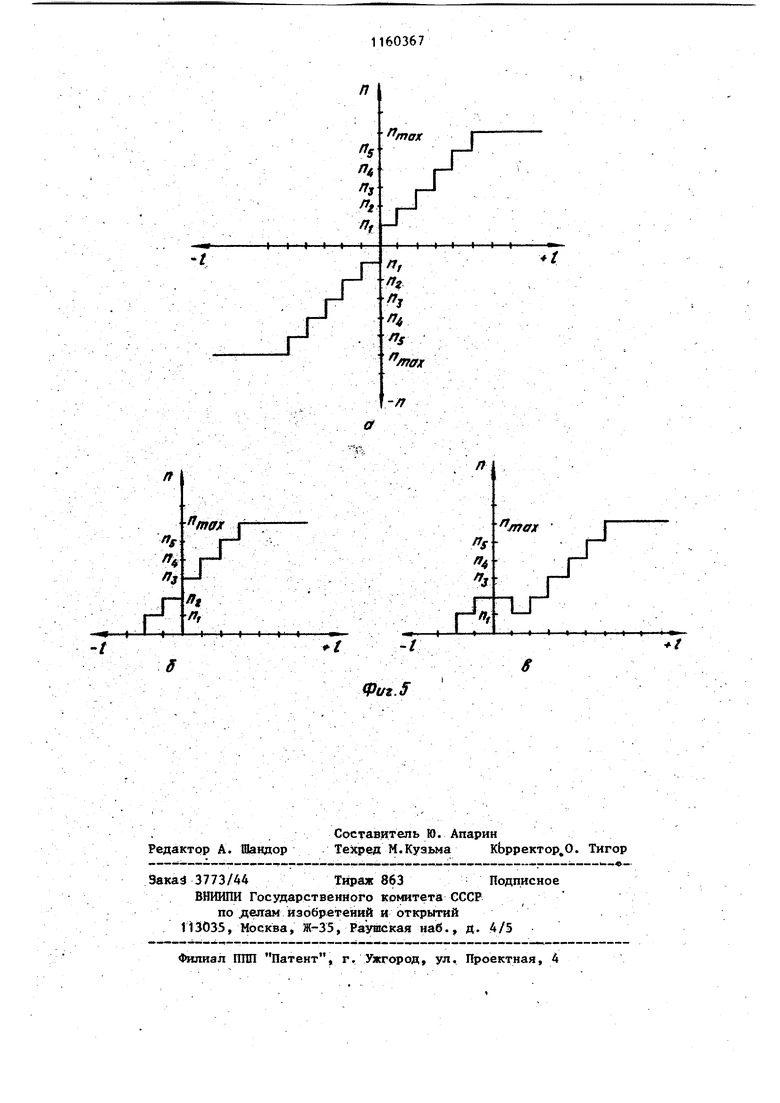
Блок 20, в зависимости от значений поступающих на него сигналов 4 осуществляется управление приводом 5. Дешифратор 21 вьфабатывает сигн с уровнем логической 1, если сос тояние старших разрядов информации А, поступаю1цей от .блока 1А задания програьп, равно нулю. Количество старших разрядов, которые подлежат дetiIнфpaции на нуль, определяется исходя из количества разрядов в ма симальной команде упреждения. При Z О независимо от значени D, т.е; когда заданная координат и перемещаемый объект находятся в одной области значения координат с выхода коммутатора 22 снимаются сигналы соответствующие сигналам V . Если 2- 1 и значение D;,o О, т.е. когда осуществляется перевод подвижного объектл из одной области координат в другую, причем :4начение заданной координаты по ве личине болыве, чем значение максимальной упреждаюцей команды, на вы ходах коммутатора V, О, т.е. осу ществляется запрет прохождению упреждаюя|их команд в симметричных точ ках координаты в запреценной области. При Z 1 и значении D т.е. когда осуществляется перевод подвижного объекта из одной области координат в другую, причем значе ни« заданной координаты равно или меньше, чем значение максимальной упреждаюпей команды (случай, когда координата задана близко к точке нуль числовой оси), на выходе коммутатора сигналы соответствуют сигналам V. . При Z О, т.е. когда перемещаем объект находится в той же области координат, что и заданная соординатга, значение выхода S зависит от значения S. В случае Z « 1, т.е. когда осуществляется перевод об-ьекта из одной области координат в дру гую , команда S на выход элементна 23 в симметричной точке не. проходит В-устройстве «адслового программного управления применено многосту пенчатое торможение при подходе перемещаемого объекта к точке поэицирнирования. На фиг. 5а покаьака зависимость скорости п перемещения исполнительного органа от крординаты рассогласования ± л . бтсзл-ет вии упреждаю1щх команд, скорость перемещения составляет ±п наличии упреждающей команды V , скорость перемещения объекта составляет Пу, при.У - п и т.д. При позиционировании перемещаемого объекта в той же области координат, что и заданы1я координата, торможение происходит по закону, отображенному, на фиг. 5а. В случае перемещения объекта из одной области значений координат в другую область значений, координат, возникают симметричные точки, в которых вырабатываются упреждающие команды и команда останова привода. Когда осуществляется перевод объекта из одной области в другую, команда останова 8д в симметричной точке не поступает на вход останова блока 20 управления приводом. Если заданная в другой области значений координата, достаточно удалена от точки нуль (т.е. значение заданной координаты больше значения максимальной команды упреждения), то поступаюир й с выхода дешифратора 21 сигнал О (цри 7 1), на вход коммутатора 22 запрещает прохождение команд упреждения на входы блока 20 управления приводом в симметричных точках. Если заданная в другой области значений координата равна или меньше значения максимальной команды упреждения, то поступакядай с выхода Дешифратора 21 -сигнал Од, 1 на вход коммутатора 22, разрешает прохождение команд упреждения на входы блока 20 управления приводом в сиго етричных точках. При этом с въ1ходов мультиплексора 16 на входы блока 18 формирования команд упреждения поступает информация X 2А + В. В блоке 18 формирования команд упреждения происходит вычитание из значения X координаты Аи сравнение полученной разности с запрогранмированньми величинами упреждения. Так как перемещение объекта из одной области значений координат в другую, значение X становится равньм lA + В, то происходит сдвиг вьфаботки упреждающих команд в сим- . метрячвых точках в сторону j точки нуль числовой оси.. Смещение симметричных точек позволяет получить характеристику торможения (фиг. 5 б) аналогичную характеристике, торможения, изображенной на фиг. 5«. Если при перемещении объекта из одной
области координат в другую область координат, не производить смещение симм. тричньгк точек выработки упреждающих команд, то время торможения увеничивавтся, так как объект,переМещ етея на пониженных скоростях большее расстояние фиг, SB). Если в зайре1ченной области координат
исключить выработку упреждающих команд в симметричных точках, то перемещаемый объект подходит близко к точке позиционирования с максимальной скоростью, вследствие чего возникает перебег точки позиционирования и неустсУичивость системы.
Фиг. Т
.
%.
. .
Д
%кг
f5
te/
ь
I/
Тг
S
R
W.
J/
JJ
п
fll
ШтЛ
н-i-H-t-t
I
max
/7 J
г fit
ч-I-I r
| СЧЕТНО-ИМПУЛЬСНАЯ СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ | 0 |
|
SU309352A1 |
| Авторское свидетельство СССР eiltai, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
