1
Изобретение относится к области автоматизации оперативного контроля и управления производственными процессами и может быть использовано в автоматизированных системах оперативного контроля и управления транспортом, например для контроля перемещений технологического транспорта на подземных рудниках и шахтах.
Известно устройство для контроля перемещения объекта 1, содержащее два канала преобразования сигналов, выполненные из последовательно соединенных бесконтактного датчика, генератора, формирователя импульсов логического элемента, и логический элемент И, к первому входу которого подключен генератор тактовых импульсов.
Наиболее близким техническим рещением к изобретению является устройство для определения направления перемещения объектов 2, содержащее два датчика, выходы которых соединены с первыми входами соответственно первого и второго элементов И, вторыми входами подключенных к первым выходам первого и второго переключающих блоков, вторые выходы которых соединены с первыми входами третьего и четвертого элементов И, два элемента ИЛИ.
К недостаткам известных устройств следует отнести то, что в устройствах для контроля перемещения объекта используемые датчики устанавливаются с перекрытием зон чувствительности, а это не всегда возможно в связи с особенностями производственных процессов.
Цель изобретения - расщирение функциональных возможностей устройства и повыщение его точности.
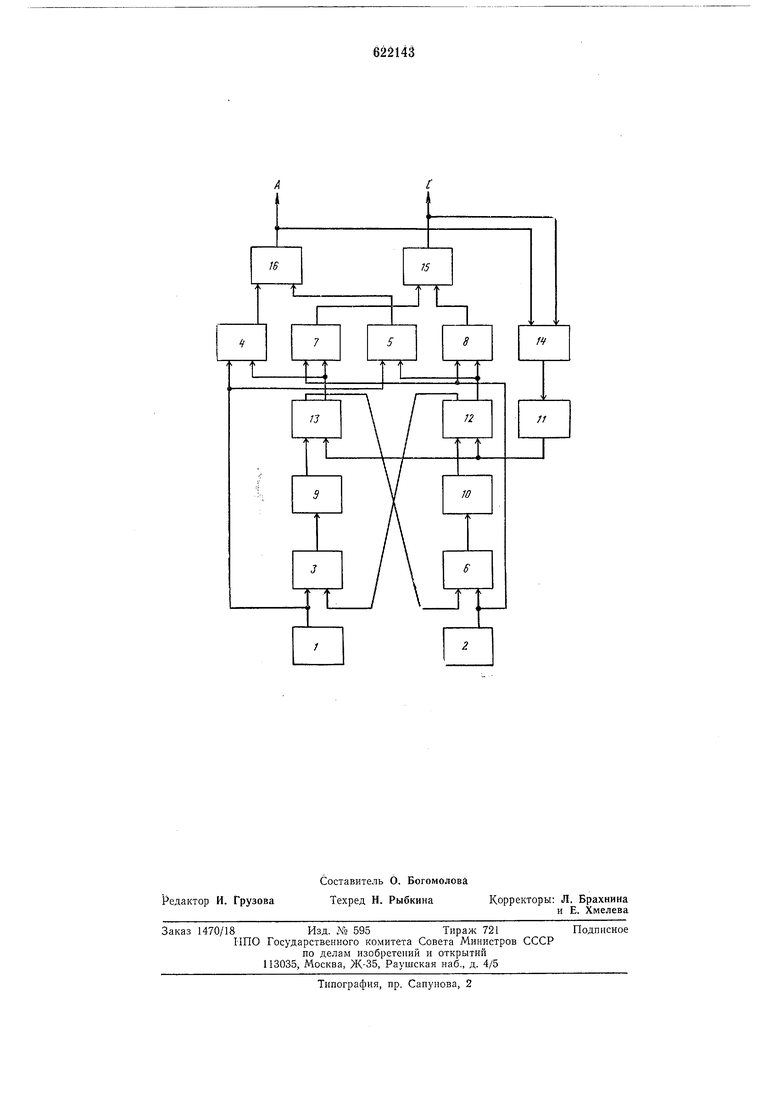
Поставленная цель достигается тем, что в устройство введены дополнительно два эле.мента И, три блока задержки, один элемент ИЛИ. Выходы первого и второго элементов И через первый и второй блоки задержки соединены с первыми входами второго и первого переключающпх блоков, выход первого датчика - с первыми входами пятого и щестого элементов И, выход второго датчика - с вторыми входами третьего и четвертого элементов И. Выходы первого и второго переключающих блоков подключены к вторым входам пятого и шестого элементов И, выходы которых соединены с первым и вторым входом первого элемента ИЛИ, выходом подключенного к первому выходу устройства и первому входу третьего элемента ИЛИ. Выходы третьего и четвертого элементов И соединены с первым и вторым входами второго элемента ИЛИ, выходом подключенного к второму выходу устройства и второму входу третьего элемента ИЛИ, выход которого через третий блок задержки связан с вторыми входами первого и второго переключающих блоков. Структурная схема устройства представлена на чертеже. Устройство содержит датчики 1 и 2, элементы И 3-8, блоки 9, 10 и 11 задержки, переключающие блоки 12 и 13, элементы ИЛИ 14, 15 и 16. Работает устройство следующим образом. Ири отсутствии движущегося объекта в зоне действия датчиков 1 и 2 на выходах А И Б устройства нет сигналов, переключающие блоки 12 и 13 находятся в состоянии, при котором элементы И 3 и 6 подготовлены, а элементы И 4, 7, 5, 8 заперты. При перемещении объекта в зоне действия датчика 1 последиий формирует сигнал импульсной формы длительностью ть Этот сигнал через элементы И 3 и блок 9 задержки, время задержки которого , переключает блок 13, который подготавливает элементы И 4 и 7 и запирает элемент PI 6. Во время дальнейшего перемещения объекта сигнал с датчика 2 через элементы И 7, ИЛИ 15, 14 и блок 11 задержки, время задержки которого , устанавливает переключающий блок 13 в исходное состояние. .Сигнал, определяющий направление перемещения объекта, появляется на выходе Б устройства. Если объект перемещается в обратном направлении, сигнал с датчика 2 через элемент И 6 и блок 10 задержки переключает блок 12, подготавливает элементы И 5, 8 и запирает элемент И 3. Затем при появлении сигнала с датчика 1 через элементы И 5, ИЛИ 16 и 14 и блок И задержки устанавливает блок 12 в исходное положение. Сигнал, определяющий направление перемещения, оказывается на выходе А устройства. При перемещении объекта в зоне действия датчиков и смене направления перемещения объкта в этой зоне появление сигнала дважды от одного и того же датчика приводит к возникновению через элементы И 4 либо 8, ИЛИ 16 либо 15 на выходах устройства А и Б сигналов, определяющих фактическое направление перемещения объектов. Использование дополнительных элементов в устройстве позволяет существенно расширить его функциональные возможности, т. е. определить направление движения объектов при маневрах в зоне чувствительности датчиков. Формула изобретенИ я Устройство для определения направлеиия перемещения объектов, содержащее два датчика, выходы которых соединены с первыми входами соответственно первого и второго элементов И, вторые входы которых соединены соответственно с первыми выходами первого и второго переключающих блоков, вторые выходы которых соединены соответственно с первыми входами третьего и четвертого элементов И, два элемента ИЛИ, отличающееся тем, что, с целью расширения функциональных возможностей устройства и повышения его точности, в него введены дополнительно два элемента И, три блока задержки, один элемент ИЛИ, выходы первого и второго элементов И соответственно через первый и второй блоки задержки соединены с первыми (Входами второго и первого переключающих блоков, выход первого датчика соединен соответственно с первыми входами пятого и шестого элементов И, выход второго датчика соединен с вторыми входами третьего и четвертого элементов И, выходы первого и второго переключающих блоков соединены соответствено с вторыми входами пятого и шестого элементов И, выходы которых соединены соответственно с первым и вторым входом первого элемента ИЛИ, выход которого соединен с первым выходом устройства и первым входом третьего элемента ИЛИ, выходы третьего и четвертого элементов И соединены соответственно с первым и вторым входами второго элемента ИЛИ, выход которого соединен с вторым выходом устройства и вторым входом третьего элемента ИЛИ, выход которого через третий блок задержки соединен с вторыми входами первого и второго переключающих блоков. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 518788, кл. G 08С 9/04, 1975. 2.Авторское свидетельство СССР № 504220, кл. G 08В 23/00, 1975.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля движения объектов | 1984 |
|
SU1193714A1 |
| Устройство для телеконтроля движения объектов | 1985 |
|
SU1305753A1 |
| Устройство для управления реверсивным электроприводом | 1981 |
|
SU993209A1 |
| Устройство для управления реверсивным вентильным выпрямителем с параллельно соединенными несинфазно питающимися мостами | 1982 |
|
SU1168057A1 |
| Устройство для пожарной сигнализации | 1977 |
|
SU669373A1 |
| Дублированная система управления | 1982 |
|
SU1062906A1 |
| Устройство для учета перемещающихсяиздЕлий | 1979 |
|
SU849256A1 |
| Устройство для управления реверсивным электроприводом | 1978 |
|
SU767706A1 |
| Устройство для считывания информации | 1982 |
|
SU1084838A1 |
| Устройство автоматического управления распределенными объектами угледобывающего комплекса | 1989 |
|
SU1739020A1 |