112
Изобретение относится к антенной технике и может быть использовано в устройстве для испытания телескопической антенны при многократном вьщви- гании-вдвигании ее подвижных звеньев
Целью изобретения .является повьппе- ние качества испытаний телескопической антенны путем обеспечения заданной последовательности выдвигания и вдвигания подвижных звеньев телеско- пической антенны, а также расширение номенклатуры по длине испытываемых телескопических антенн.
На фиг.1 представлено предлагаемое устройство, общий вид; на фиг.2 - то же, вид сбоку; на фиг.З - вид А на фиг.2; на фиг.4 - разрез Б-Б на фиг.З; на фиг.З - разрез В-В на фиг.З-, на фиг.6 - разрез Г-Г на фиг.5; на фиг.. - разрез Д-Дна фиг.З
Устройство для испытания телескопической антенны содержит основание 1, на котором установлена стойка 2, снабженная трубчатой колонкой 3 из прозрачного немагнитного материала, например из органического стекла, которая служит для ограничения колебаний свободного конца испытываемой телескопической антенны 4. На стойке 2 смонтированы держатель 5 нижней секции телескопической антенны 4 и размещенный над ним механизм 6 вьщви- гания-вдвигания подвижных секций этой антенны 4. Механизм 6 связан с ревер- сивным электродвигателем 7 через ременную передачу 8 и электромагнитный тормоз 9. Механизм 6 выдвигания-вдвигания подвижных звеньев телескопической антенны содержит два коромыс- ла 10 и 11, расположенных симметрично относительно антенны 4. На коромысле 10 установлен верхний ролик 12 на оси 13 с возможностью свободного вращения и нижний ролик 14, смонти- рованный на оси 15 и снабженный фрикционным диском 16 на его торце. На оси 15 смонтирован также узел, подтормаживающий нижний ролик 14. Этот узел содержит шлицевую полумуфту 17, подпружиненную относительно установленной в ней коаксиально втулки 18. Фиксация втулки 18 и храпового колеса 1 9 в осевом направлении обеспечена прижимной крышкой 20. Храповое колесо 19 неподвижно смонтировано на оси 15 посредством шпонки 21, а поворотная относительно этой оси 15 втулка 18 связана с охватывающей ее
02
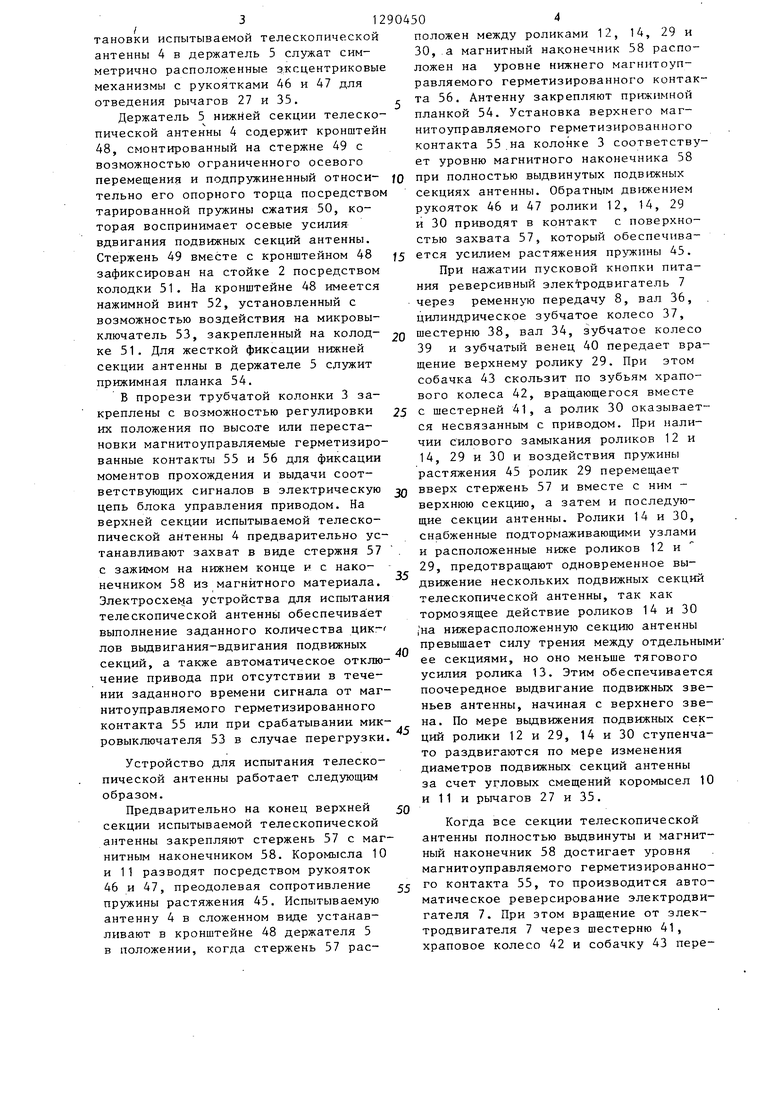
шлидевой полумуфтой 17 посредство сухарей 22, которые установлены ра- диально во втулке 18 с возможностью скольжения по соответствующим шлицам полумуфты 17. На фланце втулки 18 закреплена собачка 23 с возможностью зацепления с зубьями храпового колеса 19 под действием пружины 24. Оси 13 и 15 неподвижно закреплены на коромысле 10, которое посредством подшипника 25 установлено на оси 26, закрепленной на рычаге 27, который посредством оси 28 и подшипника установлен настойке 2 с возможностью поворота в вертикальной плоскости.
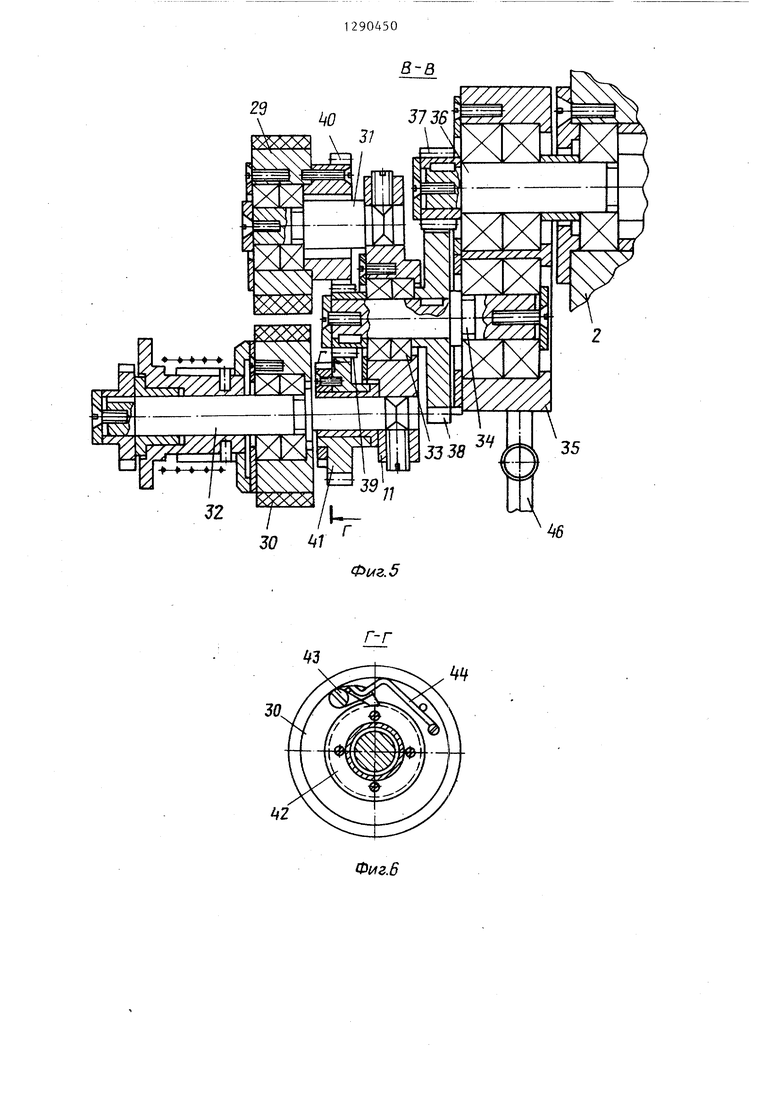
Верхний ролик 29 и нижний ролик 30 смонтированы посредством осей 31 и 32 на коромысле 11, которое посредством подшипника 33 и вала 34 установлено на рычаге 35. Рычаг 35 посредством вала 36 установлен в. подшипниковом узле стойки 2 с возможностью поворота в вертикальной плоскости. Ролики 12, 14, 29 и 30 обре- зинены для улучшения фрикционного воздейств-ия на подвижные звенья антенны 4.
На оси 32 смонтирован подтормаживающий узел ролика 30, аналогичный, по конструкции описанному узлу ролика 14, но с зеркальным расположением деталей.
Входной вал 36 одним концом кине-, матически связан с реверсивным электродвигателем 7, а другой его конец снабжен цилиндр.ическим зубчатым коесом 37, находящимся в зацеплении с шестерней 38, неподвижно закрепленной на валу 34 между рычагом 35 и коомыслом 11. На валу 34 также установлено зубчатое колесо 39, находящееся в зацеплении одновременно с зубатым В енцом 40, неподвижно закрепенным на торце ролика 29, и с шесерней 41, смонтирсэванной на оси 32 ежду коромыслом 11 и роликом 30. На бращенном к ролику 30 торце шестерни 41 закреплено храповое колесо 42 с озможностью совместного с ней вращения, а на ответном торце ролика 30 закреплена собачка 43 с возможностью зацепления с храповым колесом 42 под ействием пружины 44.
Рычаг 27 и рычаг 35 связаны между собой посредством пружины растяжения 45 для обеспечения гарантированного силового контакта роликов 12, 14, 29 и 30 с подвижными секциями телескопиеской антенны 4. Для облегчения ус/
тановки испытываемой телескопической антенны 4 в держатель 5 служат симметрично расположенные э.ксцентриковы механизмы с рукоятками 46 и 47 для отведения рычагов 27 и 35.
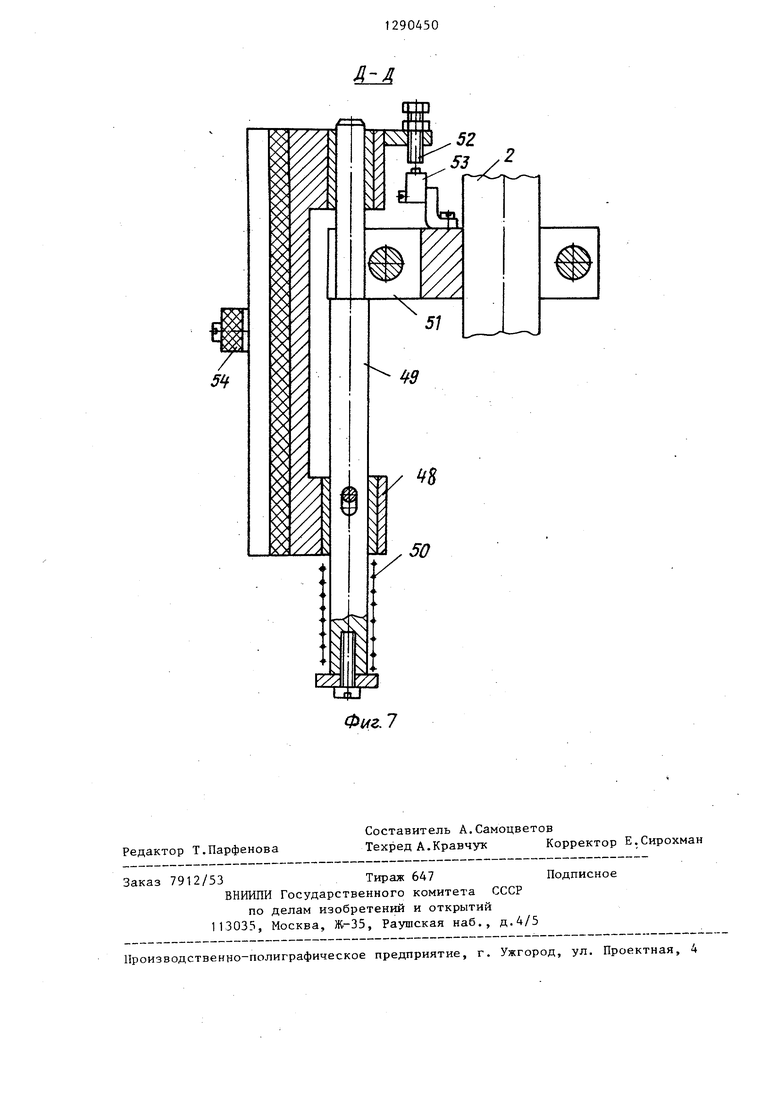
Держатель 5 нижней секции телескопической антенны 4 содержит кронштей 48, смонтированный на стержне 49 с возможностью ограниченного осевого перемещения и подпружиненный относи- тельно его опорного торца посредство тарированной пружины сжатия 50, которая воспринимает осевые усилия вдвигания подвижных секций антенны. Стержень 49 вместе с кронштейном 48 зафиксирован на стойке 2 посредством колодки 51. На кронштейне 48 имеется нажимной винт 52, установленный с возможностью воздействия на микровыключатель 53, закрепленный на колодке 51. Для жесткой фиксации нижней секции антенны в держателе 5 служит прижимная планка 54.
В прорези трубчатой колонки 3 закреплены с возможностью регулировки их положения по высоте или перестановки магнитоуправляемые герметизированные контакты 55 и 56 для фиксации моментов прохождения и выдачи соответствующих сигналов в электрическую цепь блока управления приводом. На верхней секции испытываемой телескопической антенны 4 предварительно устанавливают захват в виде стержня 57 с зажимом на нижнем конце и с наконечником 58 из магнитного материала. Электросхема устройства для испытани телескопической антенны обеспечива ет выполнение заданного количества циклов выдвигания-вдвигания подвижных секций, а также автоматическое отключение привода при отсутствии в течении заданного времени сигнала от маг нитоуправляемого герметизированного контакта 55 или при срабатывании микровыключателя 53 в случае перегрузки
Устройство для испытания телескопической антенны работает следующим образом.
Предварительно на конец верхней секции испытываемой телескопической антенны закрепляют стержень 57 с магнитным наконечником 58. Коромысла 10 и 11 разводят посредством рукояток 46 и 47, преодолевая сопротивление пружины растяжения 45. Испытываемую антенну 4 в сложенном виде устанавливают в кронштейне 48 держателя 5 в положении, когда стержень 57 рас
1290450
5
0
0
положен между роликами 12, 14, 29 и 30, а магнитный наконечник 58 расположен на уровне нижнего магнитоуп- равляемого герметизированного контакта 56. Антенну закрепляют прижимной планкой 54. Установка верхнего магнит оуправляемого герметизированного контакта 55 .на колонке 3 соответствует уровню магнитного наконечника 58 при полностью выдвинутых подвижных секциях антенны. Обратным движением рукояток 46 и 47 ролики 12, 14, 29 и 30 приводят в контакт с поверхностью захвата 57, который обеспечивается усилием растяжения пружины 45.
При нажатии пусковой кнопки питания реверсивный электродвигатель 7 через ременную передачу 8, вал 36, . цилиндрическое зубчатое колесо 37, шестерню 38, вал 34, зубчатое колесо 39 и зубчатый венец 40 передает вращение верхнему ролику 29. При этом собачка 43 скользит по зубьям храпового колеса 42, вращающегося вместе 5 с. шестерней 41, а ролик 30 оказывается несвязанным с приводом. При наличии силового замыкания роликов 12 и 14, 29 и 30 и воздействия пружины растяжения 45 ролик 29 перемещает вверх стержень 57 и вместе с ним - верхнюю секцию, а затем и последующие секции антенны. Ролики 14 и 30, снабженные подтормаживающими узлами и расположенные ниже роликов 12 и 29, предотвращают одновременное выдвижение нескольких подвижных секций телескопической антенны, так как тормозящее действие роликов 14 и 30 ;на нижерасположенную секцию антенны превышает силу трения между отдельными ее секциями, но оно меньше тягового усилия ролика 13. Этим обеспечивается поочередное выдвигание подвижных звеньев антенны, начиная с верхнего звена. По мере вьщвижения подвижных секций ролики 12 и 29, 14 и 30 ступенчато раздвигаются по мере изменения диаметров подвижных секций антенны за счет угловых смещений коромысел 10 и 11 и рычагов 27 и 35.
0
5
0
5
0
5
Когда все секции телескопической антенны полностью выдвинуты и магнитный наконечник 58 достигает уровня магнитоуправляемого герметизированного контакта 55, то производится автоматическое реверсирование электродвигателя 7. При этом вращение от электродвигателя 7 через шестерню 41, храповое колесо 42 и собачку 43 передается нижнему ролику 30, т.е. в этом случае приводными становятся оба ролика 29 и 30, а подтормаживающие узлы роликов 14 и 30 бездействуют. Под действием роликов 29 и 30 производится поочередное вдвигание подвижных секций, начиная снизу. При достижении магнитным наконечником 58 уровня маг- нитоуправляемого герметизированного контакта 56, что соответствует полностью сложенному состоянию антенны, происходит автоматическое реверсирование электродвигателя 7 и цикл испытаний повторяется.
Если при вдвигании подвижных секций осевое усилие на телескопическую антенну превьппает заданную величину, то пружина сжатия 50 сжимается, кронштейн 48 смещается вниз и нажимной винт 52 воздействует на микровыключатель 53, отключая электродвигатель 7. Если в процессе испытаний отдельные секции антенны опадают под собственным весом, то электродвигатель
12904506
нование со стойкой, на которой установлены держатель нижней секции телескопической антенны, захват верхней секции телескопической антенны, меха5 низм выдвигания-вдвигания подвижных секций телескопической антенны и его привод и позиционные переключатели направления вращения привода, блок управления приводом и датчик переfO грузки, отличающееся тем, что, с целью повышения качества испытаний, механизм выдвигания-вдвигания подвижных секций телескопической антенны выполнен в виде двух рычагов,
15 расположенных симметрично относительно держателя нижней секции телескопической антенны, шарнирно закрепленных на стойке с возможностью поворотов в вертикальной плоскости и под20 пружиненных между собой на сближение, на каждом рычаге шарнирно закреплено коромысло с возможностью поворота в вертикальной плоскости, на котором установлены верхний и нижний ролики.
7 автоматически отключается по исте- 25 причем оба верхних и оба нижних рочении заданного времени ожидания сигнала магнитоуправляемого герметизированного контакта.
Устройство может быть выполнено
лика установлены один против другого, каждый Н яжний ролик подторможен.
2. Устройство ПОП.1, отличающееся тем, что, с целью ускомногоместным для одновременного испы- ЗО рения перестройки для испытания те-- .
тания нескольких антенн одного типо- лескопических антенн разной длины,
Стойка выполнена в виде трубы из прозрачного немагнитного материала с продольной щелью, позиционные пеэто выполнено в отношении роликов 29 реключатели направления вращения прии 30.вода выполнены в виде магнитоуправляемых герметизированных контактов в продольной щели с возможностью перемещения вдоль нее, а на верхнем
размераг. В случае необходимости к приводу могут быть подсоединены ролики 12 и 14 аналогичным образом, как;
Переналадка устройства для испы- I таний телескопической антенны при реходе на другой типоразмер за ;лючается в перестановке магнитоуправляе- Q конце стержня закреплен наконечник
мого герметизированного контакта 55 по высоте и в замене, если это необходимо, пружины сжатия 50.
Формула изобретения
1. Устройство для испытания телескопической антенны, содержащее осиз магнитного материала в направлении вьщвигания телескопической анте ны, а по крайней мере один из верхних роликов связан с приводом верхн секции телескопической антенны, захват выполнен в виде стержня, разме щенного между роликами и снабженног на нижнем конце зажимом.
из магнитного материала в направлении вьщвигания телескопической антенны, а по крайней мере один из верхних роликов связан с приводом верхней секции телескопической антенны, захват выполнен в виде стержня, размещенного между роликами и снабженного на нижнем конце зажимом.
Б МАд.
5
Фиг.;
Фиг 2
4S
ФигЗ Д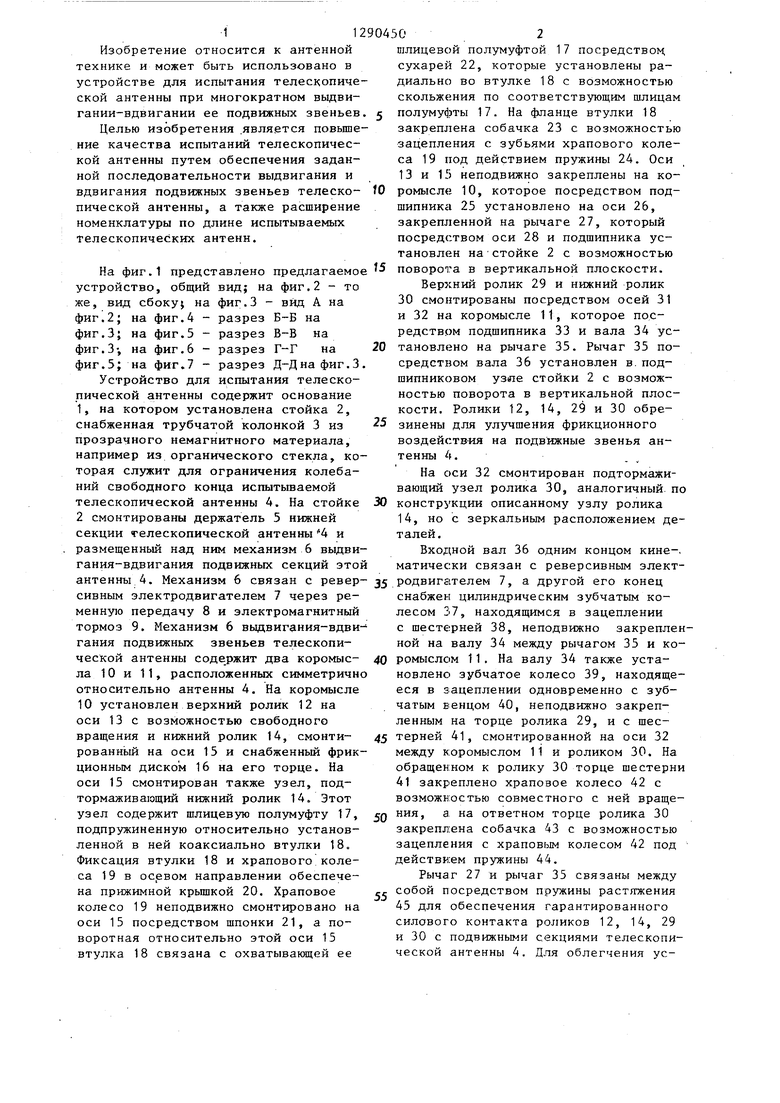
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для испытаний телескопической антенны | 1986 |
|
SU1411857A1 |
| ЗОНТ | 2002 |
|
RU2206258C2 |
| Устройство для проверки магнитных головок | 1980 |
|
SU892472A1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ПРУЖИН | 1972 |
|
SU425709A1 |
| АНТЕННО-МАЧТОВОЕ УСТРОЙСТВО ДЛЯ РАДИОРЕЛЕЙНОЙ СТАНЦИИ | 2012 |
|
RU2488203C1 |
| Устройство для разделения компонентов картофельного вороха | 1985 |
|
SU1358818A1 |
| Намоточная головка | 1984 |
|
SU1277229A1 |
| Устройство для сортировки цилиндрических изделий | 1985 |
|
SU1482738A1 |
| Автоматизированный шпулярник для сновальных машин | 1983 |
|
SU1089185A1 |
| ЗОНТ | 2002 |
|
RU2206257C2 |
Изобретение относится к антенной Технике. Цель изобретения - повышение качества испытаний антенны путем обеспечения заданной последовательности выдвигания и вдвигания подвижных звеньев антенны, а также расширение номенклатуры по длине испытываемых антенн,, Эл. схема устр-ва обеспечивает выполнение заданного количества циклов выдвигания-вдвигания подвижных секций, а также автоматич. отключение привода при отсутствии в течении заданного времени сигнала от магнито- управляемого герметизированного контакта (МГК) или при срабатывании микровыключателя в случае перегрузки. Если в процессе испытаний отдельные секции антенны опадают под собственным весом, то электродвигатель автоматич. отключается. Устр-во м.б. выполнено многоместным для одновременного испытания нескольких антенн одного типоразмера. Переналадка устр-ва при переходе на др. типоразмер заключается в перестановке МГК по высоте и в замене, если это необходимо, пружины сжатия. 1 з.п. ф-лы, 7 ил. с б (Л : ел
Б-Б
Фиг.
J2
30 1
.5
Ц2
Фиг.6
llJ
Редактор Т.Парфенова
Заказ 7912/53Тираж 647Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Пpoизвoдcтвeнl o-пoлигpaфичecкoe предприятие, г. Ужгород, ул. Проектная, 4
Фиг.7
Составитель А.Самоцветов
Техред А.Кравчук Корректор Е.Сирохман
| СПОСОБ ПРОИЗВОДСТВА РУЛОНОВ ГОРЯЧЕКАТАНОЙ ТРУБНОЙ СТАЛИ | 2004 |
|
RU2277445C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Многопозиционное устройство для испытания телескопических антенн | 1976 |
|
SU658635A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
