ких катушек и улучшение эксплуатационных свойств автомата путем повышения точности перемещения поводка. Намоточная головка содержит шпиндель 1 с приводом вращения и поводковым механизмом 4, связанным с программным диском 15,имеющим кинематическую связь со шпинделем 1, включающую червячную передачу (22, 23), и снабженным механизмом 27 возврата в ис- ходное положение, электродвигатель 31 и дифференциальный механизм 25, на выходном валу которого установлен программный диск 15, кинематически СБЯ,занный со шпинделем 1 через одну цепь дифференциального механизма 25, а механизм 27 возврата программного диска 15 в исходное положение включает в себя другую цепь дифференциального механизма 25 и связан с электро1
Изобретение относится к технологическому оборудованию для изготовления электрических катушек и может быть использовано в электротехнической, радиоэлектронной и приборостроительной промьшшенности, а также в промьшшенности средств связи,,
Цель изобретения - повьш1ение ка- |чества электрических катушек и улучшение эксплуатационных свойств автомата для их изготовления путем повышения точности перемещения поводка.
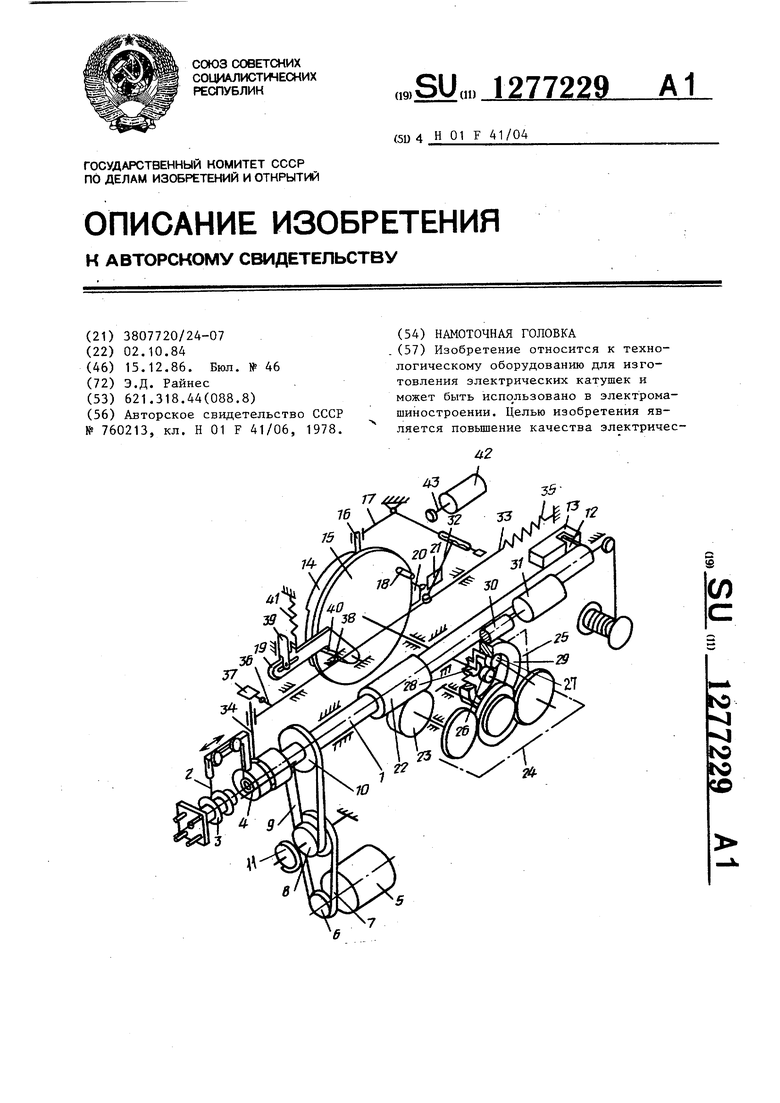
На чертеже представлена кинематическая схема намоточной головки.
Намоточная головка к автомату для изготовления электрических катушек содержит шпиндель 1 с каналом для прохода провода 2, укладываемого витками на неподвижный каркас 3 при помощи поводка 4, смонтированного на шпинделе 1 с возможностью совместного с ним вращения, а также продольного перемещения вдоль оси. Каркас 3 катушки установлен на оправке, закрепленной на поворотном столе автомата (не показаны). Привод вращения шпинделя 1 содержит электродвигатель 5, шкив 6, ремень 7, промежуточный шкив 8, ремень 9 и шкив 10. На валу
двигателем 31 через червячную пару (29, 30). Когда поводок 4 приходит в крайнее левое положение, включается электродвигатель 31, вращение от вала которого передается на выходной вал дифференциального механизма 25, обеспечивая поворот смонтированного на этом валу программного диска 15 в положение, соответствующее началу намотки. При намотке вращение шпинделя 1 преобразуется в поворот программного диска 15. Этому повороту соответствует перемещение поводка 4 вдоль шпинделя 1. Намотка провода на каркас обеспечивается по определенной программе, предусматривающей раскладку, выполнение переходов провода по секциям, заведение его в пазы ребер, наброс петли для образова- -ния среднего вывода. 1 ил.
промежуточного шкива 8 смонтирован электромагнитный тормоз 11, служаш;ий для точной остановки шпинделя 1, на котором установлен флажок 12 с возможностью воздействия на бесконтактный датчик 13, электрически связанный с электродвигателем 5.
Программа поступательных перемещений поводка 4 вдоль оси шпинделя 1
задается- профилем рабочей поверхности торцового кулачка 14, закрепленного на программном диске 15 с возможностью воздействия на ролик 16, несомый поворотным рычагом 17. На диске
15 также смонтированы палец 18 для воздействия на рычаг 19 механизма удержания поводка 4 в исходном положении перед намоткой и радиальный кулачок 20 для управления положением микропереключателя 21, который электрически связан с бесконтактным датчиком 13.
Для поворота программного диска 15 в прямом направлении (из положения, соответствующего началу намотки, в положение, соответствующее ее окончанию) служит кинематическая цепь, содержащая смонтированный на шпинделе 1 червяк 22, находящееся в зацеплеНИИ с ним червячное колесо 23 и подсоединенный к указанной червячной паре через гитару 24 сменных зубчатых колес дифференциальный механизм 25, на выходном валу которого смонтирован программный диск 15. Последний кинематически связан со шпинделем 1 через одну цепь дифференциального механизма 25, образованную незакрепленным центральным колесом 26 в нёшнего зацепле- ния, сателлитом 27 и водилом 28. Дру- ная цепь дифференциального механизма, включающая центральное колесо 29 внутреннего зацепления, саттелит 27 и водило 28, служит в. качестве меха- низма возврата программного диска 15 в исходное положение. Вращающееся центральное колесо 29 внутреннего зацепления выполнено с наружным чер- 1вячным венцом, зацепляющимся с чер- вяком 30, который подключен к злект- родвигателю 31, электрически сблокированному с электродвигателем 5.
Для сообщения поводку 4 продольн перемещений служит система шарнирно сочлененных рычагов, состоящая из углового поворотного рычага 17, тяги 32, штанги 33 и вильчатого рычага 34. Штанга 33, установленная в горизонтальных направляющих соединена с одним кондом пружины 35, которая другим концом закреплена на корпусе, обеспечивая силовое замыкание элементов кулачкового управляющего механизма во время поворота програм- много диска 15 в прямом направлении На штанге 33 смонтированы упор 36 для воздействия на микропереключател 37, электрически связанный с электродвигателем 31, а также фиксатор 38 для закрепления за собачку 39, установленную на отклоняемом рычаге 19 механизма удержания поводка 4 в исходном положении. Рычаг 19 шарнирно закреплен на корпусе головки (не по- казан) с возможностью поворота в плоскости установки собачки 39 до Упора в постоянный ограничитель 40 под действием толкающего усилия со стороны пальца 18. Рычаг 19 подпру- жинен относительно корпуса посредством пружины 41 возврата.
Для сообщения поводку 4 ускоренного перемещения в исходное положе- н ие при подготовке к намотке служит пневмоцилиндр 42 со штоком 43,управ- элементом схемы управления автомата (не приведена).
5 0 5 0
5
Намоточная головка к автомату для изготовления электрических катушек работает следующим образом.
Сигналом для подготовки головки к работе является смена позиции по воротного рабочего стола автомата с закрепленными на нем оправками, в результате чего в намоточную позицию поступает каркас 3 подлежащей намот-- ке катушки, установленный на оправке в определенном положении на предшествующих позициях. Во время смены позиции рабочего стола автомата рабочие элементы намоточной головки сохраняют те положения, в которых они находились в момент окончания намотки предшествующей катушки: программный диск 15 повернут на угол, соответствующий числу витков намотки и задаваемый установкой радиального кулачка 20 по отношению к начальному (нулевому) положению программного диска 15, при этом радиальный кулачок 20 контактирует с мик- переключателем 21, поводок 4 находит-, ся в крайнем правом положении, ролик 16 контактирует с поверхностью торцового кулачка 14 в крайней нижней точке его профиля, а микровыключатель 37, свободный от воздействия упо- ра 36, держит цепь питания электродвигателя 31 в разомкнутом состоянии.
По окончании поворота на шаг рабочего стола автоматики фиксации его в новой позиции схема управления автомата вьщает команду на включение пневмоцилиндра 42, который,воз- действуя посредством штока 43 на плечо углового поворотного рычага 17, через тягу 32 и штангу 33 с вильчатым рычагом 34 быстро переводит по- -, водок 4 в исходное положение. При этом размещенный на втором плече рычага 17 контактный ролик 16 отводится от поверхности торцового кулачка 14,а фиксатор 38, наталкиваясь при перемещении штанги 33 влево на скос собачки 39, отжимает ее вниз, преодолевая сопротивление пружины 41. После прохода фиксатора 38 за собачку 39 последняя под действием пружины 41 возврата занимает первоначальное положение, препятствуя обратному перемещению штанги 33 с поводком 4 при отключении пневмоцилиндра 42. Когда поводок приходит в крайнее левое положение, упор 36 воздействует на микропереключатель 37. Включается
электродвигатель 31, и по цепи: - червяк 30 - центральное колесо 29 - сателлит 27 - водило 28 лри невращающемся (благодаря наличию самотормозящего зацепления червячное колесо 23 - червяк 22) центральном колесе 26 вращения вала .электродвигателя
31передается на выходной вал дифференциала механизма 25, обеспечивая поворот смонтированного на этом валу программного диска 15 в положение, соответствующее началу намотки. В конце обратного хода (возврата) про- ГР4ММНОГО диска 15 смонтированный на нем палец 18, встречая на пути рычаг 19, поворачивает его вокруг неподвижной оси до упора в ограничитель 40, выводя собачку 39 из зацепления с фик фиксатором 38. Под действием пружины 35 расфиксированная штанга 33 подается вправо, воздействуя через тягу
32на рычаг 17, который приводит контактный ролик 16 в соприкосновение
с торцовым кулачком 14 в крайней верхней точке профиля его рабочей поверхности. При этом поводок 4 устанавливается над каркасам 3 в положение, строго соответствующее началу обмотку катушки, завершая тем самым под- готовку к намотке.
Одновременно с перемещением штанги 33 вправо упор 36 отходит от микропереключателя 37, электродвигатель 3 отключается, а питание получает электродвигатель 5. Необходимьш интервал времени (в пределах 0,2-0,5 с) между отключением электродвигателя 31 и включением двигателя 5 обеспечивается элементом задержки в электрической схеме головки (не приведена). Вращение от электродвигателя 5 при помощи шкивов 6, 8 и 10 и ремней 7 и 9 пере- дается на шпиндель 1 с поводком 4, осуществляющим намотку провода 2 на каркас 3. Одновременно с этим по цепи - червяк 22 - червячное колесо 23 гитара 24 - центральное колесо 26 - сателдит 27 - водило 28 при невращающемся (благодаря самотормозящему зацеплению колеса 29 и червяка 30) центральном колесе 29 вращение шпинделя 1 преобразуется в поворот программного диска 15.
Этот поворот программного диска 15 в прямом направлении сопровождается изменениями положения ролика 16, поджатого к поверхности торцового кулачка 14 под действием пружины
35, которые преобразуются в перемещения поводка 4 вдоль шпинделя 1 по цепи - поворотный рычаг 17 - тяга 32 - штанга 33 - вильчатый рычаг 34. Таким образом обеспечивается намотка провода 2 на каркас 3 по определенной программе, предусматривающей при необходимости раскладку, выполнение переходов провода по Секциям, заведение его в пазы ребер, наброс петли для последующего изготовления среднего вывода и т.д.
Когда программный диск 15 приходит в положение, соответствующее окончанию намотки, смонтированньй на нем радиальный кулачок 20 нажимает на микропереключатель 21, который подключает обмотку бесконтактного датчика 13 к цепи питания. При выполнении последнего витка намотки под воздействием входящего в паз датчика 13 флажка 12, расположенного на шпинделе 1, происходит отключение электродвигателя 5 и одновременное срабатывание электромеханического тормоза 11. Шпиндель 1 останавливается в определенном по углу положении.
Электросхема управления автоматом, зафиксировав окончание намотки катушки, выдает команду на поворот стола, и цикл повторяется.
Формула изобретения
Намоточная головка,к автомату для изготовления электрических катушек, содержащая шпиндель с приводом вращения и поводковью механизмом, связанным с программным диском, имеющим кинематическую связь со шпинделем,включающую червячную передачу, и снабженным механизмом возврата в исходное положение, отличающаяся тем, что, с целью повьш1ения качества электрических катушек и улучшения эксплуатационных свойств автомата путем повышения точности перемещения поводка, она снабжена электродвигателем и дифференциальным механизмом, на выходном валу которого установлен программный диск, кинематически свя- занный со шпинделем через одну дифференциального механизма, а механизм возврата программного диска в исходное положение включает в себя другую цепь дифференциального механизма и связан с электродвигателем через червячную пару.

| название | год | авторы | номер документа |
|---|---|---|---|
| Намоточная головка | 1988 |
|
SU1585839A1 |
| Намоточная головка | 1980 |
|
SU930405A2 |
| Автомат для изготовления электрических катушек | 1981 |
|
SU1023419A1 |
| Автомат для изготовления электрических катушек | 1988 |
|
SU1583987A1 |
| Автомат для изготовления электрических катушек | 1977 |
|
SU720549A1 |
| Автомат для изготовления электрических катушек | 1987 |
|
SU1555718A1 |
| Намоточная головка | 1980 |
|
SU983772A2 |
| Автомат для сварки кольцевых швов в среде защитных газов | 1974 |
|
SU519294A1 |
| Автомат для изготовления электрических катушек | 1977 |
|
SU728175A1 |
| Автомат для изготовления электрических катушек | 1973 |
|
SU474859A1 |
| Авторское свидетельство СССР № 760213, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
