Изобретение относится к машиностроению, а именно к робототехнике, и может быть использовано в роботах, осуществляющих операции контроля и сортировки.
Цель изобретения - расширения функциональных возможностей схвата за счет обеспечения возможности определения формы и размеров детали в процессе ее захвата, а также использования данных, получаемых в процессе захвата, для последуювыходом генератора 9 и выходами операционных усилителей 14.
Схват промыщленного робота работает следующим образом.
При подходе схвата к захватываемой детали часть стержней 3 упирается в нее торцами пальцев и утапливается в теле кареток 2. Стержни, не вошедшие в соприкосновение с деталью, остаются неутопленными. При сближении кареток 2 под
щей идентификации деталей, с которыми ра-Ю действием привода ближайшие к детали не- ботает робот.утопленные стержни зажимают деталь
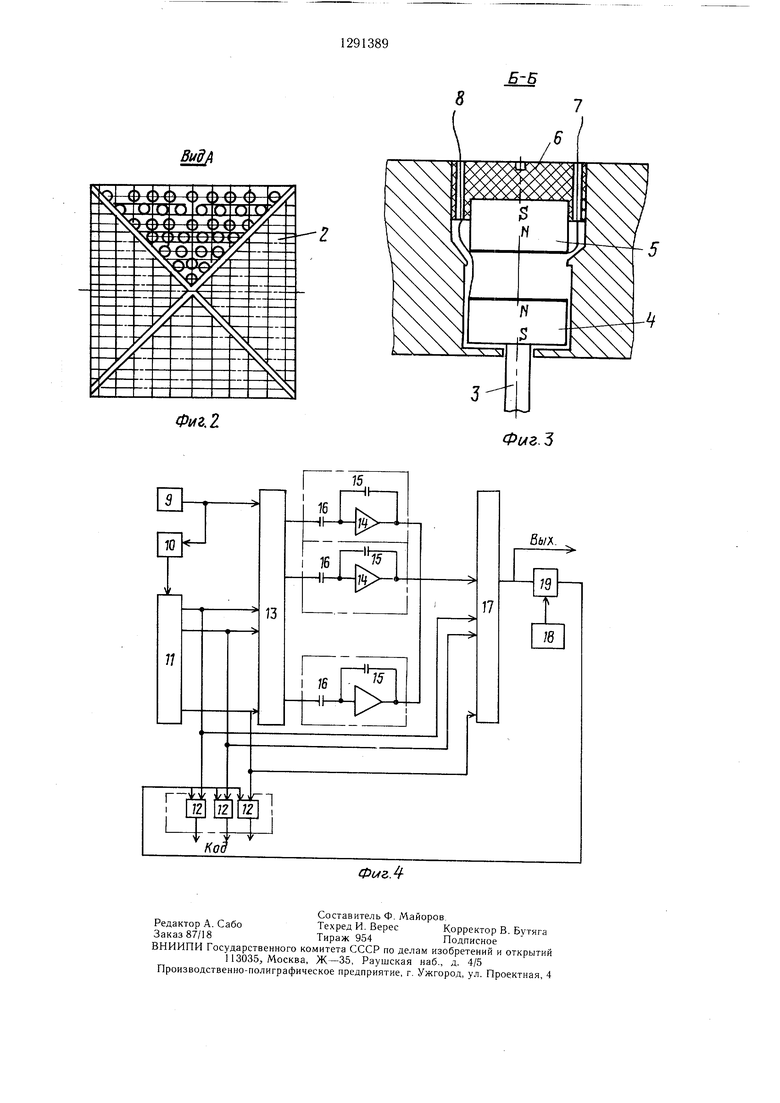
На фиг. 1 изображен схват, общий вид;боковыми поверхностями. При этом ход кана фиг. 2 - вид А на фиг. 1; на фиг. 3 -реток 2 не превышает шага равномерного
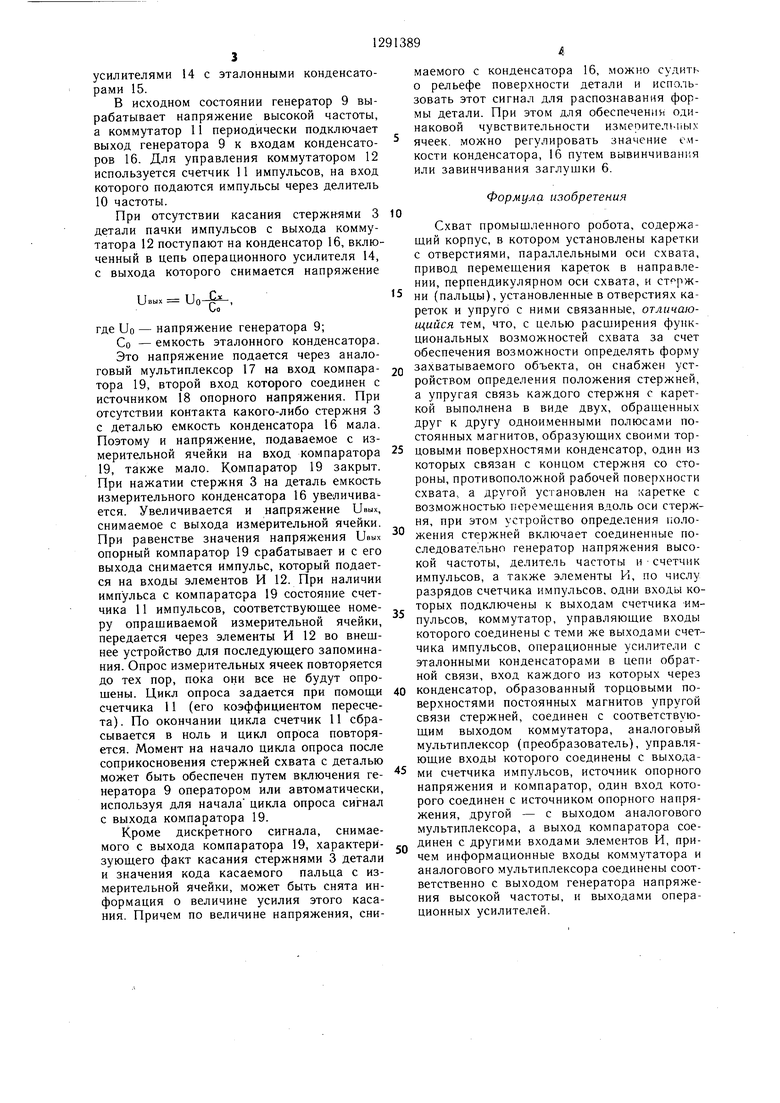
разрез Б-Б на фиг. 1; на фиг. 4 - изме-размещения пальцев 3 на торцовых поверхрительная цепь чувствительного устройства ностях кареток 2.
В процессе соприкосновения с деталью утопленные стержни 3 перемещают постоянный магнит 4 (каждый палец на свой магнит), который приближается к магниту 5. Так как торцовые поверхности постоянных магнитов 4 и 5 образуют конденсатор 16, то под действием прикладываемого усилия из-за соприкосновения схвата с деталью расстояние между его обкладками уменьшается. Конденсатор 16 соединен с входом операционного услителя 14, который содержит эталонный конденсатор 15, включенный в цепь обратной связи. В результате изменения расстояния между обкладками конденсатора 16 его емкость изменяется в соответствии с зависимостью
25
захвата.
Схват промыщленного робота (фиг. 1) содержит корпус 1 с каретками 2, установленными на передней торцовой поверхности корпуса с возможностью перемещения в направлении, перпендикулярном 20 к оси захвата от привода их перемещения (не показан). В равномерно размещенных на торцовых поверхностях кареток 2 отверстиях, оси которых параллельны оси корпуса 1 схвата, смонтированы с возможностью перемещения стержни 3 (фиг. 2 и 3), которые упруго связаны с кареткой с помощью постоянных магнитов 4 и 5, ориентированных относительно друг друга одноименными полюсами. Магнит 5 помещен в заглущку 6, имеющую возможность перемещения относительно кареток 2. Торцовые поверхности постянных магнитов 4 и 5 образуют обкладки измерительного конденсатора с выводами 7 и 8. Кроме того, схват содержит устройство для определения положения стержней 3 (фиг. 4), которое включает соединенные последовательно генератор 9 напряжения высокой частоты, делитель 10 частоты и счетчик 11 импульсов, элементы И 12 по числу разрядов счетчика 11 импульсов, одни входы которых подключе30
с
е-5
35
где е - диэлектрическая проницаемость воздуха;
S - площадь торцовых поверхностей магнитов;
d - расстояние между торцовыми поверхностями магнитов 4 и 5.
Конденсаторы 16 вместе с постоянными магнитами 4 и 5 являются чувствительк входам счетчика 11 импуль- 40 ными элементами, каждый из которых в
45
ны
сов, коммутатора 13, управляющие входы которого соединены также с выходами счетчика 11 импульсов, операционные усилители 14 по числу стержней 3 с эталонными конденсаторами Со 15 в цепи обратной связи, вход каждого из которых через конденсатор Сх 16, образованный торцовыми поверхностями магнитов 4 и 5, соединен с соответствующим выходом коммутатора 13, аналоговый мультиплексор 17, управляющие входы которого соединены с вы- JQ ходами счетчика импульсов, источник 18 опорного напряжения и компаратор 19. Один вход компаратора 19 соединен с источником опорного напряжения, другой - с выходом аналогового мультиплексора 17, а выход компаратора 19 соединен с другими входами элементов И 12, причем информационные входы коммутатора 13 и аналогового мультиплексора 17 соединены соответственно с
55
плоскости торцовой поверхности губок имеет свои координаты, а их совокупность представляет собой дискретную информационную поверхность. В процессе соприкосновения с деталью сочетание нажатых и ненажатых стержней 3 позволяет получить информацию о ее форме. Для этого необходимо определить какой из стержней 3 утоплен, а какой нет, т.е. определить координаты нажатого стержня, а по совокупности нажатых стержней и форму детали в процессе ее захвата. Устройство позволяет определить координаты стержней в цифровых значениях для каждого стержня, которые считываются во внещние устройства.
Определение координат пальца осуществляется по изменению величины емкости конденсатора 16 в измерительной цепи путем последовательного опроса измерительных ячеек, образованных операционными
выходом генератора 9 и выходами операционных усилителей 14.
Схват промыщленного робота работает следующим образом.
При подходе схвата к захватываемой детали часть стержней 3 упирается в нее торцами пальцев и утапливается в теле кареток 2. Стержни, не вошедшие в соприкосновение с деталью, остаются неутопленными. При сближении кареток 2 под
20
30
с
е-5
где е - диэлектрическая проницаемость воздуха;
S - площадь торцовых поверхностей магнитов;
d - расстояние между торцовыми поверхностями магнитов 4 и 5.
Конденсаторы 16 вместе с постоянными магнитами 4 и 5 являются чувствитель5
Q
5
плоскости торцовой поверхности губок имеет свои координаты, а их совокупность представляет собой дискретную информационную поверхность. В процессе соприкосновения с деталью сочетание нажатых и ненажатых стержней 3 позволяет получить информацию о ее форме. Для этого необходимо определить какой из стержней 3 утоплен, а какой нет, т.е. определить координаты нажатого стержня, а по совокупности нажатых стержней и форму детали в процессе ее захвата. Устройство позволяет определить координаты стержней в цифровых значениях для каждого стержня, которые считываются во внещние устройства.
Определение координат пальца осуществляется по изменению величины емкости конденсатора 16 в измерительной цепи путем последовательного опроса измерительных ячеек, образованных операционными
усилителями 14 с эталонными конденсаторами 15.
В исходном состоянии генератор 9 вырабатывает напряжение высокой частоты, а коммутатор 11 периодически подключает выход генератора 9 к входам конденсаторов 16. Для управления коммутатором 12 используется счетчик 11 импульсов, на вход которого подаются импульсы через делитель 10 частоты.
При отсутствии касания стержн-ями 3 детали пачки импульсов с выхода коммутатора 12 поступают на конденсатор 16, включенный в цепь операционного усилителя 14, с выхода которого снимается напряжение
,
jO
где Uo - напряжение генератора 9;
Со - емкость эталонного конденсатора.
Это напряжение подается через аналоговый мультиплексор 17 на вход компаратора 19, второй вход которого соединен с источником 18 опорного напряжения. При отсутствии контакта какого-либо стержня 3 с деталью емкость конденсатора 16 мала. Поэтому и напряжение, подаваемое с измерительной ячейки на вход компаратора 19, также мало. Компаратор 19 закрыт. При нажатии стержня 3 на деталь емкость измерительного конденсатора 16 увеличивается. Увеличивается и напряжение Увых, снимаемое с выхода измерительной ячейки. При равенстве значения напряжения Увых опорный компаратор 19 срабатывает и с его выхода снимается импульс, который подается на входы элементов И 12. При наличии импульса с компаратора 19 состояние счетчика 11 импульсов, соответствующее номеру опрашиваемой измерительной ячейки, передается через элементы И 12 во внешнее устройство для последующего запоминания. Опрос измерительных ячеек повторяется до тех пор, пока они все не будут опро10
20
25
30
35
маемого с конденсатора 16, можно судить о рельефе поверхности детали и использовать этот сигнал для распознавания формы детали. При этом для обеспечении одинаковой чувствительности измерительных ячеек, можно регулировать значение емкости конденсатора, 16 путем вывинчивания или завинчивания заглушки 6.
Формула изобретения
Схват промышленного робота, содержащий корпус, в котором установлены каретки с отверстиями, параллельными оси схвата, привод перемещения кареток в направлении, перпендикулярном оси схвата, и 15 ни (пальцы), установленные в отверстиях кареток и упруго с ними связанные, отличающийся тем, что, с целью расширения функциональных возможностей схвата за счет обеспечения возможности определять форму захватываемого объекта, он снабжен устройством определения положения стержней, а упругая связь каждого стержня с кареткой выполнена в виде двух, обращенных друг к другу одноименными полюсами постоянных магнитов, образующих своими торцовыми поверхностями конденсатор, один из которых связан с концом стержня со стороны, противоположной рабочей поверхности схвата, а другой установлен на каретке с возможностью перемещения вдоль оси стержня, при этом устройство определения положения стержней включает соединенные последовательно генератор напряжения высокой частоты, делитель частоты исчетчик импульсов, а также элементы И, по числу разрядов счетчика импульсов, одни входы которых подключены к выходам счетчика -импульсов, коммутатор, управляющие входы которого соединены с теми же выходами счетчика импульсов, операционные усилители с эталонными конденсаторами в цепи обратной связи, вход каждого из которых через
шены. Цикл опроса задается при помощи 40 конденсатор, образованный торцовыми посчетчика 11 (его коэффициентом пересчета). По окончании цикла счетчик 11 сбрасывается в ноль и цикл опроса повторяется. Момент на начало цикла опроса после соприкосновения стержней схвата с деталью может быть обеспечен путем включения ге- нератора 9 оператором или автоматически, используя для начала цикла опроса сигнал с выхода компаратора 19.
Кроме дискретного сигнала, снимаемого с выхода компаратора 19, характеризующего факт касания стержнями 3 детали и значения кода касаемого пальца с измерительной ячейки, может быть снята информация о величине усилия этого касания. Причем по величине напряжения, сни50
верхностями постоянных магнитов упругой связи стержней, соединен с соответствующим выходом коммутатора, аналоговый мультиплексор (преобразователь), управляющие входы которого соединены с выходами счетчика импульсов, источник опорного напряжения и компаратор, один вход которого соединен с источником опорного напряжения, другой - с выходом аналогового мультиплексора, а выход компаратора соединен с другими входами элементов И, причем информационные входы коммутатора и аналогового мультиплексора соединены соответственно с выходом генератора напряжения высокой частоты, и выходами операционных усилителей.
маемого с конденсатора 16, можно судить о рельефе поверхности детали и использовать этот сигнал для распознавания формы детали. При этом для обеспечении одинаковой чувствительности измерительных ячеек, можно регулировать значение емкости конденсатора, 16 путем вывинчивания или завинчивания заглушки 6.
Формула изобретения
10
0
5
0
Схват промышленного робота, содержащий корпус, в котором установлены каретки с отверстиями, параллельными оси схвата, привод перемещения кареток в направлении, перпендикулярном оси схвата, и 5 ни (пальцы), установленные в отверстиях кареток и упруго с ними связанные, отличающийся тем, что, с целью расширения функциональных возможностей схвата за счет обеспечения возможности определять форму захватываемого объекта, он снабжен устройством определения положения стержней, а упругая связь каждого стержня с кареткой выполнена в виде двух, обращенных друг к другу одноименными полюсами постоянных магнитов, образующих своими торцовыми поверхностями конденсатор, один из которых связан с концом стержня со стороны, противоположной рабочей поверхности схвата, а другой установлен на каретке с возможностью перемещения вдоль оси стержня, при этом устройство определения положения стержней включает соединенные последовательно генератор напряжения высокой частоты, делитель частоты исчетчик импульсов, а также элементы И, по числу разрядов счетчика импульсов, одни входы которых подключены к выходам счетчика -импульсов, коммутатор, управляющие входы которого соединены с теми же выходами счетчика импульсов, операционные усилители с эталонными конденсаторами в цепи обратной связи, вход каждого из которых через
0
верхностями постоянных магнитов упругой связи стержней, соединен с соответствующим выходом коммутатора, аналоговый мультиплексор (преобразователь), управляющие входы которого соединены с выходами счетчика импульсов, источник опорного напряжения и компаратор, один вход которого соединен с источником опорного напряжения, другой - с выходом аналогового мультиплексора, а выход компаратора соединен с другими входами элементов И, причем информационные входы коммутатора и аналогового мультиплексора соединены соответственно с выходом генератора напряжения высокой частоты, и выходами операционных усилителей.
Budf(
Фиг,2
0i/3.5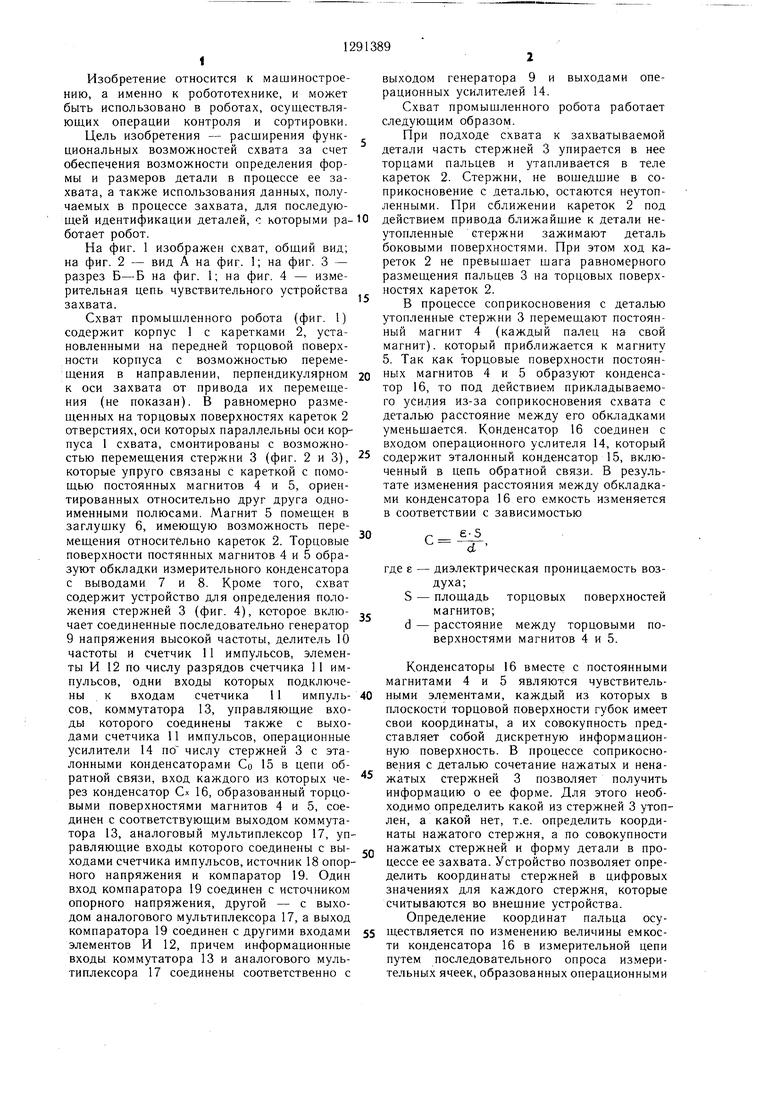
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ НАПРЯЖЕНИЯ В ИНТЕРВАЛ ВРЕМЕНИ | 2004 |
|
RU2263321C1 |
| Измерительный схват промышленного робота | 1988 |
|
SU1634489A1 |
| МНОГОКАНАЛЬНОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СРЕДНЕКВАДРАТИЧЕСКОГО ЗНАЧЕНИЯ НАПРЯЖЕНИЯ | 2000 |
|
RU2198410C2 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
| Многоканальный компаратор напряжения с гальванически изолированными каналами | 2015 |
|
RU2618356C1 |
| ПРЕОБРАЗОВАТЕЛЬ НАПРЯЖЕНИЯ В ИНТЕРВАЛЫ ВРЕМЕНИ | 2014 |
|
RU2552605C1 |
| Аналого-цифровой преобразователь | 1987 |
|
SU1481887A1 |
| Устройство контроля электромагнитных параметров гибкого магнитного диска | 1988 |
|
SU1578627A1 |
| Многоканальное устройство ввода аналоговой информации | 1987 |
|
SU1418726A1 |
| Система диагностики заболеваний | 1983 |
|
SU1140132A1 |
Изобретение относится к машиностроению, а именно к робототехнике, и может быть использовано в роботах, осуществляющих операции контроля и сортировки. Целью изобретения является расширение функциональных возможностей схвата за счет обеспечения возможности определения формы и размеров детали в процессе ее захвата, а также использования данных, получаемых в процессе захвата для последующей идентификации деталей, с которыми работает робот. Схват промышленного робота содержит корпус 1 с каретками 2, имеющими равномерно расположенные отверстия с осями, параллельными оси схвата, в которых смонтированы с возможностью осевого перемещения стержни 3, упруго связанные с кареткой 2 с помощью двух посто V 4 Л янных магнитов, размещенных соосно со стержнем и ориентированных относительно друг друга одноименными полюсами. Один из постоянных магнитов связан со стержнем, а второй закреплен неподвижно в заглушке, имеющей возможность перемещения относительно каретки 2. Торцовые поверхности магнитов образуют конденсатор измерительной цепи, которая содержит последовательно включенные генератор напряжения высокой частоты, делитель частоты и счетчик импульсов, коммутатор, элементы И по числу разрядов счетчика, измерительную ячейку по числу пальцев, включающую в себя операционный усилитель, к входу которого подключен измеряемый конденсатор и охваченный обратной связью, в которую включен эталонный конденсатор, последовательно включенные мультиплексор и компаратор, второй вход которого подсоединен к источнику опорного напряжения, а выход - к входам элементов И. Выходы разрядов счетчика подключены к вторым входам элементов И, к управляющим входам коммутатора и мультиплексора, информационные входы которых подключены соответственно к входу генератора напряжения высокой частоты и к выходам операционных усилителей. 4 ил. to (Л to со со оо со гНдашииФМ ФМ iI Тл и ,1
Составитель Ф. Майоров,
Редактор А. СабоТехред И. ВересКорректор В Бутяга
Заказ 87/18Тираж 954Подписное
ВНИИПИ Государственного комитета СССР го делам изобретений и открытий
И3035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Ф(гЛ
| Схват промышленного робота | 1975 |
|
SU533478A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
