Изобретение относится к (механизации загрузоч.но-разтрузочных работ в 0:бласти машиностроения, в частности к жонструкцик схватов промышленных робото-в.
Известен схват, содержаший. корпус, губки и -привод перемешения губок в направлении, перпендикулярном к оси схвата 1.
iC целью обеспечения возможности захвата деталей различных размеров без снижения быстродействия губки выполнены в виД кареток, имеюших равномерно расположенные отверстия с осями, параллельными оси схвата, в которых смонтированы с возможностью осевого перемеш;ения подпружиненные пальцы, установленные таким образом, что они выступают над торцовой поверхностью кареток и утапливаются под воздействием детали на их тарцозые поверхности.
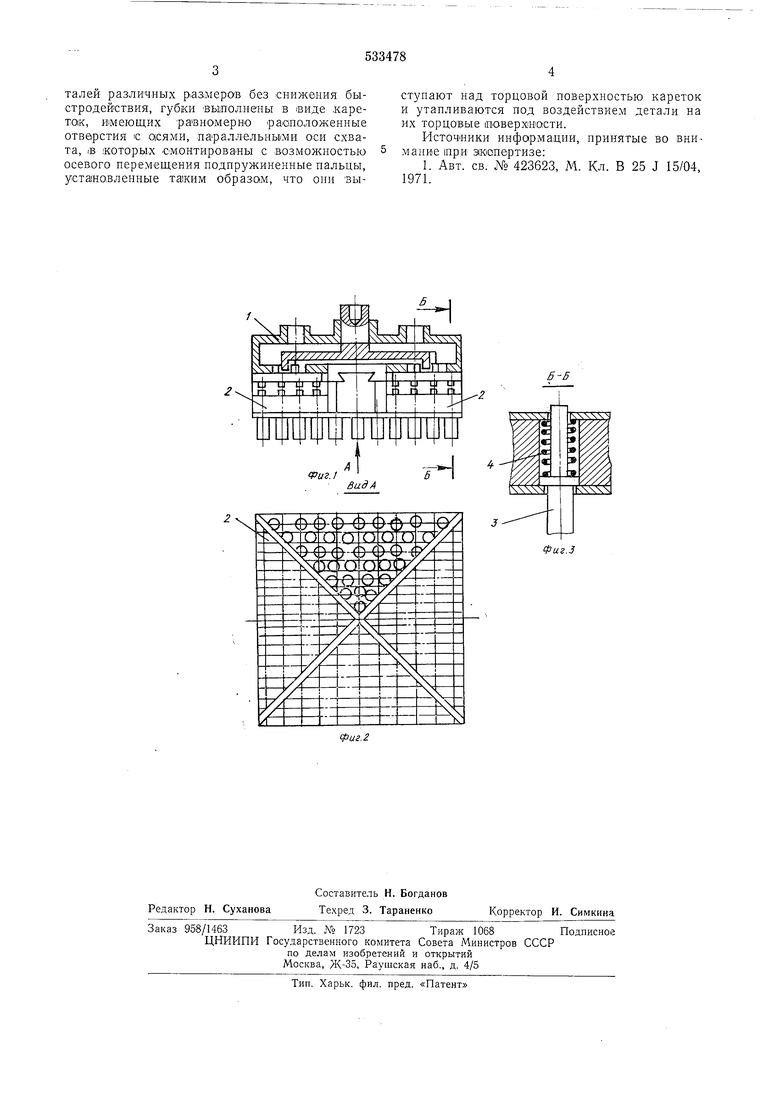
На фиг. 1 показан схват нромышленного робота в поперечном разрезе; на фиг. 2 - вид по стрелке А на фиг. 1; на фиг. 3 - разрез по Б-Б на фиг. 1.
Схват промышленного робота содержит Корпус / и губки 2, выполненные в форме юаретак и установленные на передней торцовой поверхности корпуса с возможностью перемешения в направлении, перпендикулярном 1К оси схвата от привода перемешения губок (не показан). В равномерно размешенных иа торцовых поверхностях губок отверстиях, оси которых параллельны оси корпуса 1 схвата, смонтированы с возмол ностью осево-го перемешенпя п-альды 5, подпружиненные пружинами 4.
Схват промышленного робота работает следующим образом.
Прп подходе схвата к захватываемой детали часть подпружиненных пальцев 3 упирается в нее торцами и утапливается в теле губок 2. Пальцы, не вошедшие в соприкосновение с деталью, остаются неутонленными. При сближении губок 2 под действием привода ближайшие к детали неутопленные пальцы зажимают деталь боковыми поверхностя;ми. При этом ход губок 2 не превышает шага размешения пальцев 3 на торцовых noiBepXHостях губок.
Использование изобретения позволяет сохранить высокое быстродействие схвата при манипулировании объектами с большим диапазоном измепепия размеров без замены или переналадки захватного органа.
Формула изобретения
Схват прО1Мышленного робота, содержащий корпус, губки и привод перемещения губок в направлении, перпендикулярном к оси схвата, отличающийся тем, что, с целью обеспечения возможности захвата деталей различных размеров без снижения быстродействия, губки Бышолнены в виде кареток, имеющих равномерно расположенные отверстия с асями, параллельными оси схвата, (В которых СМонтироваНЫ с возможностью осевого перемещения нодпружиненные пальцы, установленные тажим образ:ам, что они выступают над торцовой поверхностью кареток и утапливаются под воздействием детали на их торцовые поверхности.
Источники информации, принятые во внимание |при экспертизе:
1. Авт. св. № 423623, М. Кл. В 25 J 15/04, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительный схват промышленного робота | 1988 |
|
SU1634489A1 |
| Схват промышленного робота | 1984 |
|
SU1291389A1 |
| Захват промышленного робота | 1985 |
|
SU1288051A1 |
| Групповой схват промышленного робота | 1981 |
|
SU975389A1 |
| Гибкий производственный модуль | 1988 |
|
SU1593915A1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| Схват манипулятора | 1983 |
|
SU1098792A1 |
| Робототехнологический комплекс | 1985 |
|
SU1271742A1 |
| Схват промышленного робота | 1989 |
|
SU1703452A1 |
| Схват промышленного робота | 1983 |
|
SU1177150A2 |
Вид А
Фиг.З
