1291936
кости в емкости содержит безнапорный канал 1, емкость (пульповодосборник) 2, всасывающее устройство 3 с органом 4 управления, напорный канал 5 с органом 6 управления, датчики 7, 8,
1
Изобретение относится к автоматическому регулированию уровня в емкостях (пульповодосборниках) по притоку жидкости (гидросмеси) и может быть использовано на производствах, содержащих безнапорное и напорное гидротранспортирование материала со случайными прерываниями во времени номинального значения расхода.
Цель изобретения - повышение точности и расширение области применения системы.
На фиг.1 показана структурная схема системы, на фиг. 2 - графа состояний всасывающего устройства;на фиг.3- функциональная схема дешифратора;на фиг.4 - функциональная схема блока прогноза; на фиг.5 - функциональная схема блока сравнения.
Система регулирования уровня жидкости в емкости содержит безнапорный канал 1, емкость (пульповодосборник) 2, всасывающее устройство 3 с органом 4 управления, напорный канал 5 с запорным устройством и органом 6 управления, датчики 7-10 расхода,датчик 11 уровня, дешифратор 12, блок 13 прогноза, блок 14 компараторов, блок 15 логики и блок 16 исполнительных механизмов.
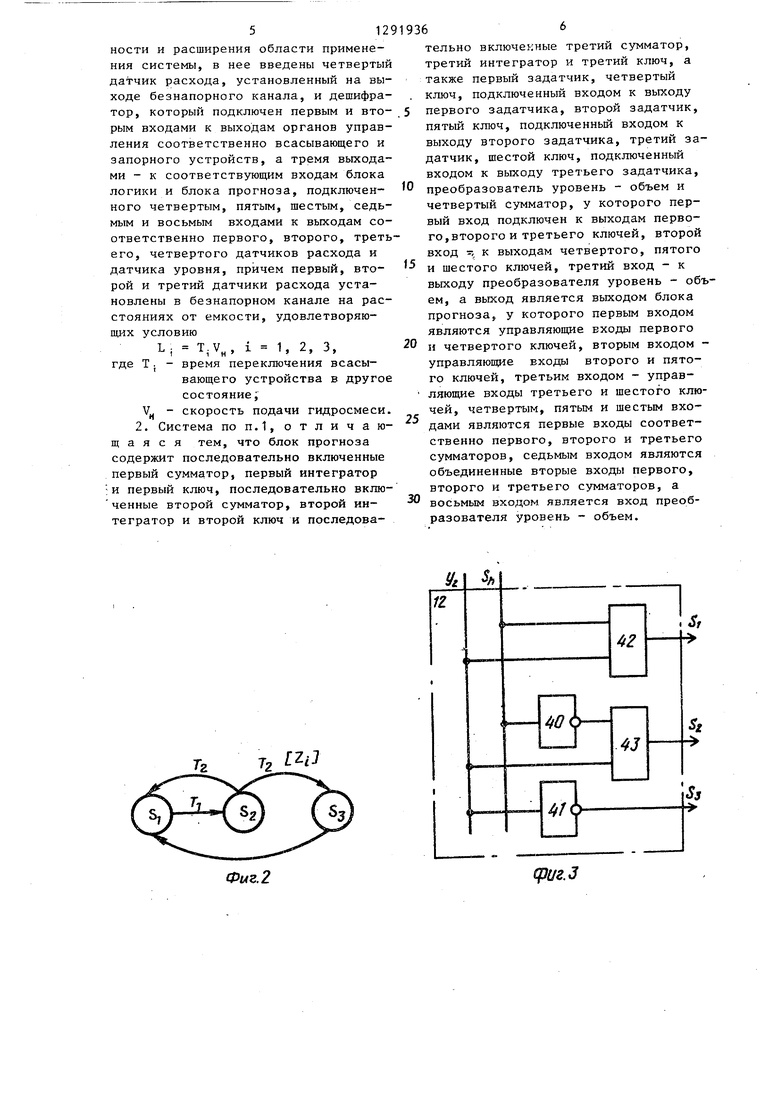
Блок 13 прогноза содержит сумматоры 17-20, интеграторы 21-23, ключи 24-29, задатчики 30-32 и преоб- разователь 33 уровень - объем.
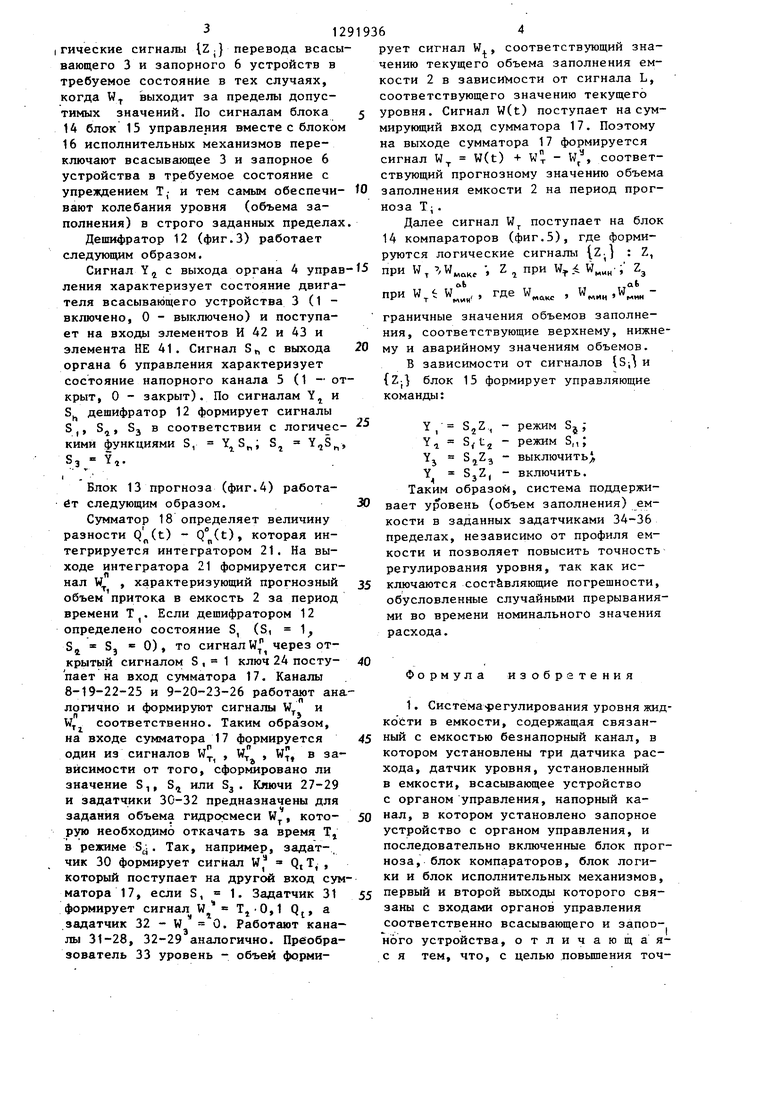
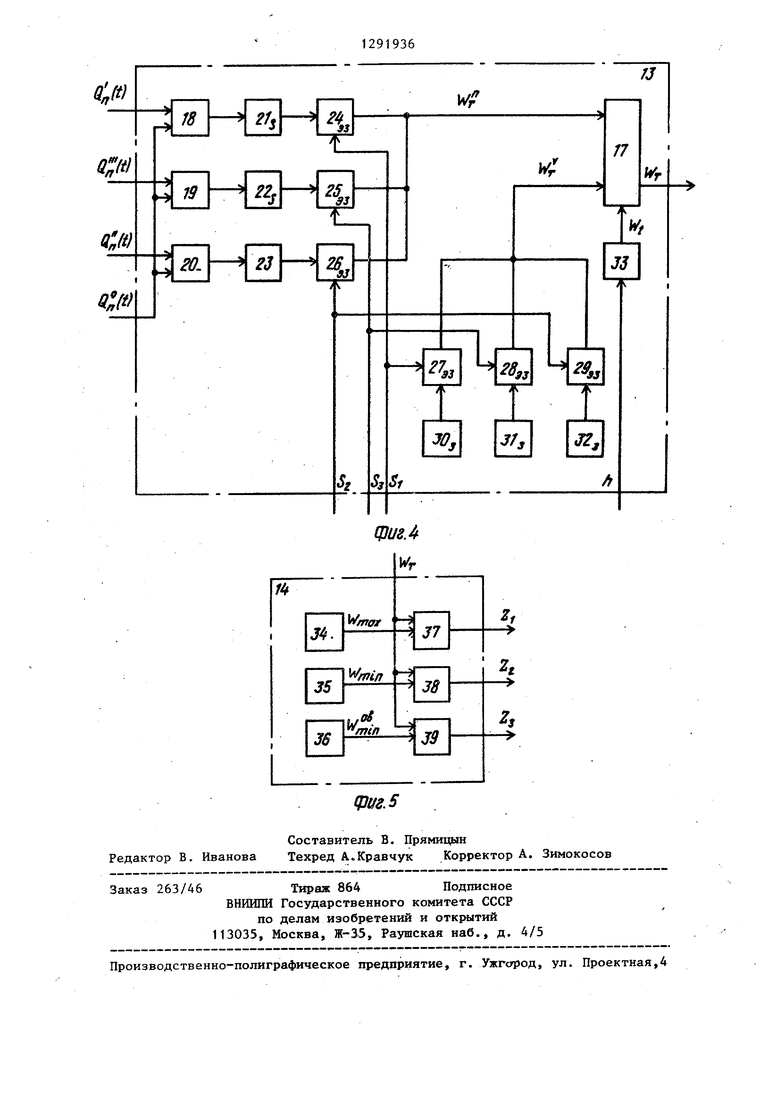
Блок 14 компараторов (Содержит задатчики 34-36 и компараторы 37-39. Дешифратор. 12 содержит злемен- ты НЕ 40 и 41 и элементы И 42 и 43.
Всасывающее устройство 3 (фиг.1 и 2) может находиться в одном из трех состояний: S, - с подачей Q, (пЬ гидросмеси), Sj - с подачей 0,1 Q, (по воде) и S - выключено. Каждое состояние характеризуется инерционностью Т (временем переключения в другое состояние). Численное значе9, 10 расхода,, датчик 11 уровня,дешифратор 12, блок 13 прогноза, блок 14 компараторов, блок 15 логики и блок 16 исполнительных механизмов. 1 п.з. ф-лы,.5 ил.
5
0
ние инерционности определяется конкретными типами всасывающего 3 и запорного 6 устройств и параметрами напорного канала 5. Типичные значения инерционности Т; находятся в пределах: 8-12 мин для Т,, 2-3 мин )для Tj, 6-10 мин для Т. Поэтому управлять всасывающим устройством 3 так, чтобы уровень L заполнения емкости 2 находился в строго заданных пределах, можно лишь рассчитывая объем притока W в емкость за период времени Т-.-Это позволяет своевременно (с упреждением) выработать управляющее воздействие, обеспечивающее заданный уровень жидкости. С этой цедью для притоков гидросмеси со случайными прерываниями во времени номинального значения расхода Q датчики 7-9 устанавливаются на безнапорном канале 1 на расстояниях LJ от емкости 2 так, чтобы удовлетворялось следующее соотношение:
25
L Т,У„
1 2 3 -
где V - скорость номинального значения расхода Q.
Устройство работает следующим образом.
Сигналы датчиков 7-10 расхода соответственно (Qh(t), Q o(t), Qn(t), (t)), пропорциональные притокам, поступают на блок 13 прогноза, на ругие входы которого поступают с деифратора 12 логические сигналы (Sj), характеризующие текущее состояние всасывающего устройства 3 Блок 13 определяет прогнозную величину объема заполнения (уровня) W в емкости 2 на период прогноза Т , однозначно заданного состоянием S. . Значение W поступает далее на блок 14, где осуществляется сравнение его с верхним и нижним значениями допустимых границ заполнения. Блок 14 формирует ло12919364
перевода всасы- рует сигнал W,, соответствующий знаIгические сигналы (Z } вающего 3 и запорного 6 устройств в требуемое состояние в тех случаях, когда W выходит за пределы допустимых значений. По сигналам блока 5 14 блок 15 управления вместе с блоком 16 исполнительных механизмов переключают всасывающее 3 и запорное 6 устройства в требуемое состояние с упреждением Т,- и тем самым обеспечи- tO вают колебания уровня (объема заполнения) в строго заданных пределах.
Дешифратор 12 (фиг.З) работает следующим образом.
Сигнал YJ с выхода органа 4 управ-15 при W а Р м«н э
чению текущего объема заполнения емкости 2 в зависимости от сигнала L, соответствующего значению текущего уровня. Сигнал W(t) поступает на сум мирующий вход сумматора 17. Поэтому на выходе сумматора 17 формируется сигнал W W(t) + w - W, соответствующий прогнозному значению объема заполнения емкости 2 на период прогноза Т; .
Далее сигнал W поступает на блок 14 компараторов (фиг.5), где формируются логические сигналы {Z.j : Z, Z при W.-4 й„„„ , Z.
ления характеризует состояние двигателя всасывающего устройства 3(1- включено, О - выключено) и поступает на входы злементов И 42 и 43 и элемента НЕ 41 . Сигнал S, с выхода органа 6 управления характеризует состояние напорного канала 5(1- открыт, О - закрыт). По сигналам Y и S дешифратор 12 формирует сигналы
( э
кими функциями S,
соответствии
5.
Блок 13 прогноза (фиг.4) работает следующим образом.
Сумматор 18 определяет величину разности Qn(t) - Q (t), которая интегрируется интегратором 21. На выходе интегратора 21 формируется сигнал W , характеризующий прогнозный объем притока в емкость 2 за период времени Т . Если дешифратором 12 определено состояние S, (S, 1 S Sj 0), то сигнал W через открытый сигналом S, 1 ключ 24 посту- пает на вход сумматора 17. Каналы 8-19-22-25 и 9-20-23-26 работают аналогично и формируют сигналы W и W, соответственно. Таким образом, на входе сумматора 17 формируется один из сигналов wlj. , W , W, в зависимости от того, сформировано ли значение S,, S или 83. Ключи 27-29 и задатчики 30-32 предназначены для задания объема гидросмеси W, которую необходимо откачать за время Т в режиме S. Так, например, задат-, чик 30 формирует сигнал WJ QiT, , который поступает на другой вход сумматора 17, если S, 1. Задатчик 31 формирует сигнал W, ,1 Q, а задатчик 32 - W 0. Работают каналы 31-28, 32-29 аналогично. Преобразователь 33 уровень - объем форми
при W а Р м«н э
чению текущего объема заполнения емкости 2 в зависимости от сигнала L, соответствующего значению текущего уровня. Сигнал W(t) поступает на суммирующий вход сумматора 17. Поэтому на выходе сумматора 17 формируется сигнал W W(t) + w - W, соответствующий прогнозному значению объема заполнения емкости 2 на период прогноза Т; .
Далее сигнал W поступает на блок 14 компараторов (фиг.5), где формируются логические сигналы {Z.j : Z, Z при W.-4 й„„„ , Z.
&Ь .- .,cib
мнн
W.
,w
при W, , где W
граничные значения объемов заполнения, соответствующие верхнему, нижнму и аварийному значениям объемов. В зависимости от сигналов (S-Д и (Zj) блок 15 формирует управляющие команды:
Таким образом, система поддерживает уровень (объем заполнения) емкости в заданных задатчиками 34-36 пределах, независимо от профиля емкости и позволяет повысить точность регулирования уровня, так как исключаются составляющие погрешности, обусловленные случайными прерываниями во времени номинального значения расхода.
Формула изобретения
1. Система-регулирования уровня жидкости в емкости, содержащая связанный с емкостью безнапорный канал, в котором установлены три датчика расхода, датчик уровня, установленный в емкости, всасывающее устройство с органом управления, напорный канал, в котором установлено запорное устройство с органом управления, и последовательно включенные блок прогноза, блок компараторов, блок логики и блок исполнительных механизмов,
первый и второй выходы которого связаны с входами органов управления соответственно всасывающего и запоо-. ного устройства, отличающая- с я тем, что, с целью повышения точности и расширения области применения системы, в нее введены четвертый датчик расхода, установленный на выходе безнапорного канала, и дешифратор, который подключен первым и вторым входами к выходам органов управления соответственно всасывающего и запорного устройств, а тремя выходами - к соответствующим входам блока логики и блока прогноза, подключенного четвертым, пятым, шестым, седьмым и восьмым входами к выходам соответственно первого, второго, третьего, четвертого датчиков расхода и датчика уровня, причем первый, второй и третий датчики расхода установлены в безнапорном канале на расстояниях от емкости, удовлетворяющих условию
Li Т.У„, 1 1,2, 3, где Т; - время переключения всасывающего устройства в другое состояние ,
V - скорость подачи гидросмеси. 2. Система поп.1, отличающаяся тем, что блок прогноза содержит последовательно включенные первый сумматор, первый интегратор и первый ключ, последовательно включенные второй сумматор, второй интегратор и второй ключ и последова5
0
5
0
5
0
тельно включенные третий сумматор, третий интегратор и третий ключ, а также первый задатчик, четвертый ключ, подключенный входом к выходу первого задатчика, второй задатчик, пятый ключ, подключенный входом к выходу второго задатчика, третий задатчик, шестой ключ, подключенный входом к выходу третьего задатчика, преобразователь уровень - объем и четвертый сумматор, у которого первый вход подключен к выходам первого,второго и третьего ключей, второй вход к выходам четвертого, пятого и шестого ключей, третий вход - к выходу преобразователя уровень - объем, а выход является выходом блока прогноза, у которого первым входом являются управляющие входы первого и четвертого ключей, вторым входом - управляюв е входы второго и пятого ключей, третьим входом - управляющие входы третьего и шестого ключей, четвертым, пятым и шестым входами являются первые входы соответственно первого, второго и третьего сумматоров, седьмым входом являются объединенные вторые входы первого, второго и третьего сумматоров, а восьмым входом является вход преобразователя уровень - объем.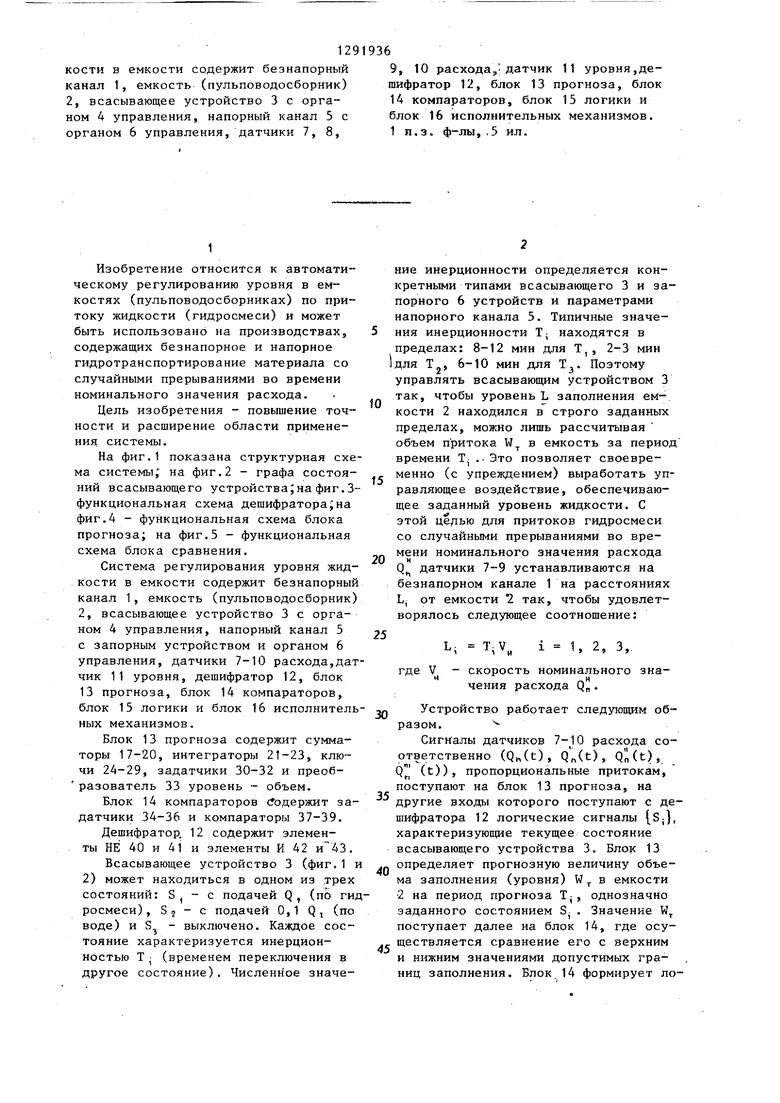
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования уровняжидКОСТи B ЕМКОСТи | 1979 |
|
SU830332A2 |
| Устройство для регулирования уровня жидкости в емкости | 1978 |
|
SU723527A1 |
| Устройство для контроля расхода гидросмеси в призматическом русле | 1985 |
|
SU1296843A1 |
| Устройство для управления землесосным снарядом | 1990 |
|
SU1721191A1 |
| Устройство для автоматического контроля и регулирования режима безнапорного трубопроводного гидротранспорта | 1981 |
|
SU1000359A2 |
| Дискретный уровнемер | 1986 |
|
SU1332150A1 |
| СПОСОБ ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ПРОЦЕССА УБОРКИ ЗЕРНА КОМБАЙНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2462019C1 |
| Устройство для контроля за уровнем промывочной жидкости в скважине и выявления аварийных ситуаций | 1987 |
|
SU1498914A2 |
| Следящая система | 1987 |
|
SU1631513A1 |
| Устройство для управления водоснабжением участка гидрошахты | 1985 |
|
SU1275376A2 |
Изобретение относится к автоматическому регулированию уровня в емкостях (пульповодосборниках) по притоку жидкости (гидросмеси) и может быть использовано на производствах, содержащих безнапорное и напорное гидротранспортирование материала со случайными прерываниями во времени номинального значения расхода.Цель изобретения - повышение точности и расширение области применения системы путем обеспечения возможности нормального функционирования при случайных прерываниях во времени номинального значения расхода и с емкостями различного профиля. Для этого система регулирования уровня жид$ (Л
Т2 fZ,-J
Фиг. 2
(риг.З
ЦЗигЛ
Редактор В. Иванова
fpifz.s
Составитель В. Пряьялцлн
Техред А.Кравчук Корректор А. Зимокосов
Заказ 263/46 Тираж 864 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,4
| Спиваковский А.О | |||
| и др | |||
| Автоматизация трубопроводного транспорта в горной промьпнленности | |||
| М.: Недра, 1972, с | |||
| Способ передачи радиотелеграфных сигналов | 1922 |
|
SU394A1 |
| Устройство для управления гидро-ТРАНСпОРТНОй уСТАНОВКОй | 1978 |
|
SU822150A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для регулирования уровняжидКОСТи B ЕМКОСТи | 1979 |
|
SU830332A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Q/i«/ | |||
