Изобретение относится к области электротехники, в частности к шаговым электродвигателям, и может быть использовано для дискретного старт-стопного перемещения подвижного объекта, не создающего на валу щагового двигателя подвижного объекта.
Целью изобретения является обеспечение регулирования величины шага двигателя и уменьшение величины шага.
На чертеже схематично изображен пред- лагаемый двигатель, общий вид.
Шаговый двигатель содержит дополнительный вал 1 и выходной вал 2, расположенные соосно и независимо закрепленные в опорах. На выходном валу жестко закреп- лен зубчатый ферромагнитный ротор 3. Приводной электромагнит 4 жестко закреплен на дополнительном валу и расположен около внещней поверхности ротора вблизи его зубцов. На дополнительном валу 1 жестко закреплены не менее двух ферромагнитных дисков. На чертеже в качестве примера изображены диски 5-7, рядом с которыми подвижно закреплены ферромагнитные диски 8-Юс группами электромагнитов 11 -13, расположенные концентрично ферромагнит- ным дискам.
Неподвижные электромагнитные фиксаторы 14-16 расположены вблизи подвижных ферромагнитных дисков. Неподвижный электромагнитный фиксатор 17 расположен вблизи ферромагнитного диска 18, жестко закрепленного на дополнительном валу. Числа зубцов зубчатых ферромагнитных дисков не равны друг другу. Расстояние между электромагнитами каждой группы равн о t(m + 1/п), где / - зубцовое деление ферромагнитного диска, п - число элект- ромагнитов в группе, т - целое число.
Двигатель работает следующим образом.
Для поворота ротора на требуемый угол на данный угол предварительно поворачивают дополнительный вал. Для этого фиксируют одну из групп электромагнитов электромагнитным фиксатором, последовательно включая электромагниты данной группы, добиваются поворота дополнительного вала, в результате последовательного совмещения возбужденных электромагнитов с зубцами ферромагнитного диска соответствующего данной группе электромагнитов на угол
ft
--- где /Ci - число переключений элект- «1
ромагнитов; ti - зубцовое деление ферро- магнитного диска; п - число электромагнитов данной группы. Далее фиксируют другую группу электромагнитов, электромагнитный фиксатор первой группы отключают и поворачивают дополнительный вал с по
мощью второй группы электромагнитов на
К f угол ---, где К2, 2 и «2 - число переключения, зубцовое деление ферромагнитного диска и число электромагнитов второй группы. При необходимости дополнительный вал поворачивают с помощью третьей группы электромагнитов. Суммарный поворот вала а составляет:
, 1 ,
( IjIZ тt
П|П2Пз
После поворота дополнительный вал фиксируют электромагнитным фиксатором, включают приводящий электромагнит и ротор поворачивается на угол а относительно своего прежнего положения. Далее приводящий электромагнит отключают и при необходимости повторяют цикл.
Угол поворота ротора а может регулироваться в широких пределах путем изменения чисел переключения электромагнитов /Ci, Kz и КзТаким образом, при работе шагового двигателя реализуется следующий способ перемещения выходного вала. В периоды остановки выходного вала статор двигателя поворачивают в каком-либо направлении на несколько шагов. Величина шага перемещения определяется дискретностью устройства перемещения статора. Затем статор поворачивают в обратном направлении на несколько шагов другим устройством дискретного перемещения статора, причем число и величина шагов отличны от числа и величины шагов предыдущего перемещения. При необходимости статор перемещают третьим устройством дискретного перемещения на несколько шагов, число и величина которых отличаются от числа и величины шагов предыдущих перемещений. Суммарная величина перемещения статора равна величине шага ротора. Ротор двигателя отрабатывает каждый свой шаг при подаче импульса управления на обмотку статора.
5
0
5
Формула изобретения
Шаговый двигатель, содержащий безобмоточный ферромагнитный зубчатый ротор, закрепленный на выходном валу, и электромагнит, расположенный вблизи зубчатой поверхности ротора, отличающийся тем, что, с целью регулирования величины шага, двигатель снабжен дополнительным валом, расположенным соосно выходному валу, на котором жестко закреплен электромагнит, по крайней мере, двумя ферромагнитными зубчатыми дисками, жестко закрепленными на дополнительном валу и числа зубцов которых не равны друг другу, группами электромагнитов по числу ферромагнитных дисков, каждая из которых содержит, по крайней мере, два электромагнита, расположенных вокруг каждого из ферромагнитных
1292128 34
дисков вблизи его зубцов и подвижно за-рами по числу групп электромагнитов плюс
крепленными на дополнительном валу, и не-один, примыкающими к дополнительному
подвижными электромагнитными фиксато-валу и к каждой группе электромагнитов.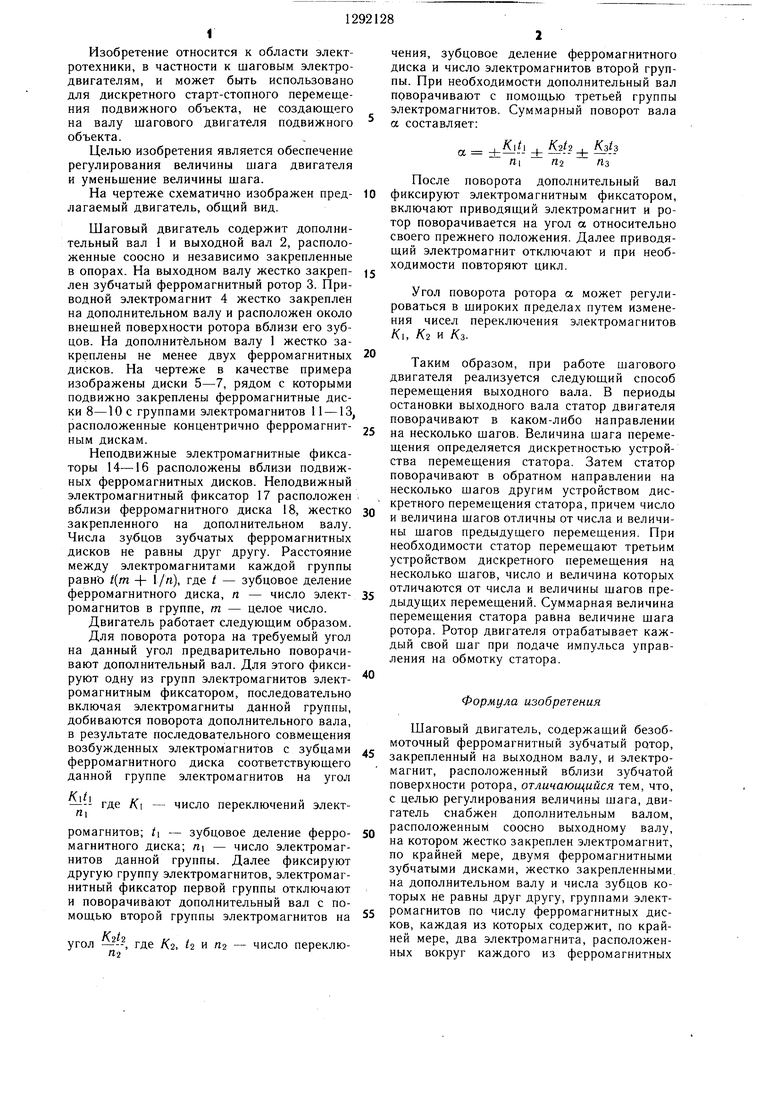
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2013 |
|
RU2544836C1 |
| Шаговый двигатель | 2016 |
|
RU2659798C1 |
| МАГНИТОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1988 |
|
RU2030075C1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1991 |
|
RU2031523C1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2015 |
|
RU2596145C1 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ДВИГАТЕЛЬ | 2014 |
|
RU2547813C1 |
| Шаговый электродвигатель | 1981 |
|
SU989696A1 |
| СПОСОБ УПРАВЛЕНИЯ КОЛЛЕКТОРНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 1969 |
|
SU248049A1 |
| Шаговый электродвигатель | 1983 |
|
SU1164830A1 |
| Дифференциальный индукционный датчик углового положения и частоты вращения | 1990 |
|
SU1796891A1 |
Изобретение относится к электротехнике и может быть использовано для дискретного старт-стопного перемещения подвижного объекта, не создающего на валу двигателя активного момента. Цель изобретения - обеспечение регулирования величины шага двигателя и уменьщение величины щага. Шаговый двигатель содержит дополнительный вал 1 и выходной вал 2, расположенные соосно и независимо закрепленные в опорах. На выходном валу жестко закреплен зубчатый ферромагнитный ротор 3. Приводной электромагнит 4 жестко закреплен на дополнительном валу и расположен около внещней поверхности ротора вблизи его зубцов. На подготовительном валу жестко закреплены зубчатые ферромагнитные диски 5-7, рядо.м с которыми подвижно закреплены ферромагнитные диски 8-10 с группами электромагнитов 11 -13, расположенные концентрично ферромагнитным дискам. Числа зубцов зубчатых ферромагнитных дисков не равны друг другу. В конструкции предусмотрены электромагнитные фиксаторы 14-17. Для обеспечения поворота ротора на требуемый шаг под действием импульса управления, подаваемого на обмотку статора з периоды остановки выходного вала, статор двигателя поворачивают в одном направлении на несколько шагов, величина которых определяется дискретностью устройства перемещения статора, а затем в обратном направлении на несколько шагов другим устройством дискретного перемещения, число и величина которых отличны от числа и величины шагов предыдущего перемещения. Суммарная величина перемещения статора равна величине щага ротора и может регулироваться в широких пределах. 1 ил. SP (Л Ю СО ISD N3 сх ю 18
| Волновой шаговый электродвигатель | 1978 |
|
SU936265A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Шаговой электродвигатель | 1970 |
|
SU443444A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
