Изобретение относится к машиностроению, а именно к средствам-конт- роля зубчатых передач.
Цель изобретения - повьшение точ- .ностй измерений люфта путем подсчета количества импульсов датчика быстроходного звена за время выборки люфта за счет использования управляемого реверсивного счетчика импульсой.
На фиг.1 изображена структурная схема устройства для измерения мертвого хода отсчетных и зубчатых передач J на фиг„2 - то же, блока управления счетчиком импульсов; на фиг.З - диаграмма напряжений устройства.
Устройство для измерения мертвого хода отсчетных и зубчатЬгх передач включает импульсные датчики 1 и 2 углов поворота быстроходного и тихоходного валов контролируемого механизма 3,5 приводной двигатель 4 быстроходного вала с блоком 5 управления, нагрузочный механизм б тихоходного вала, счетчик 7 импульсов, датчик 8 скорости, блок 9 управления счетчиком 7 импульсов, первый вход которого соединен с выходом импульсного датчика 2 тихоходного вала, второй вход - с выходом блока 5 управления двигателем 4, первый, второй, третий и чет- вертьй выходы - соответственно с первым., вторым, третьим и четвертым входами счетчика 7 импульсов, и измерителем 10 скорости, связанньп с выходом датчика 8 скорости.
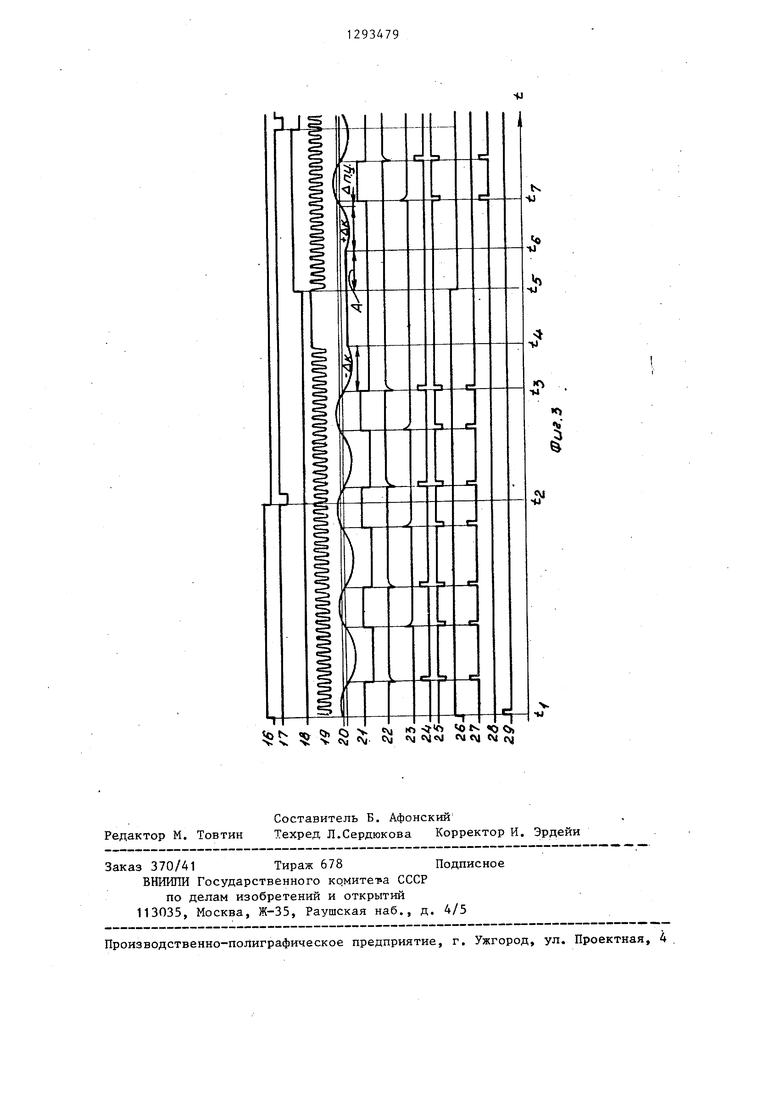
Для пояснения работы устройства на фиг,3 приняты следующие обозначения: 16 - сигнал Прямой ход блока управления двигателем, 17 - сигнал Стоп блока управления двигателем; 18 - сигнал Обратньй ход блока управления двигателем 19 - сигнал импульсного датчика быстроходного вала, 20 - сигнал импульсного датчика тихоходного вала 21 - сигнал на выходе порогового блока; 22 - продиф- ференцироваиньй и ограниченный сверху сигнал порогового блока; 23 - продифференцированный и ограниченный снизу сигнал порогового устройства; 24 - . инверсия сигнала 22J 25 - суммарный инверсный сигнал из сигналов 23 и 24 26 - сигнал Вычитание блока управления счетчиком импульсов; 27 - сиг- нал Сброс блока управления счетчиком импульсов; 28 - сигнал Стоп блока управления счетчиком импульсов 29 - сигнал Старт блока управления счетчиком импульсов; А - мертвый ход контролируемого механизма; 4ПУ - по- грешность порогового устройства, -ДК - погрешность (угловая) меяаду последним фронтом (или спадом) порого вого устройства и положением, при котором происходит остановка выходного вала контролируемого механизма н-АК угловая погрешность между первым спадом или фронтом импульса порогового устройства и положением, при котором происходит начало движения
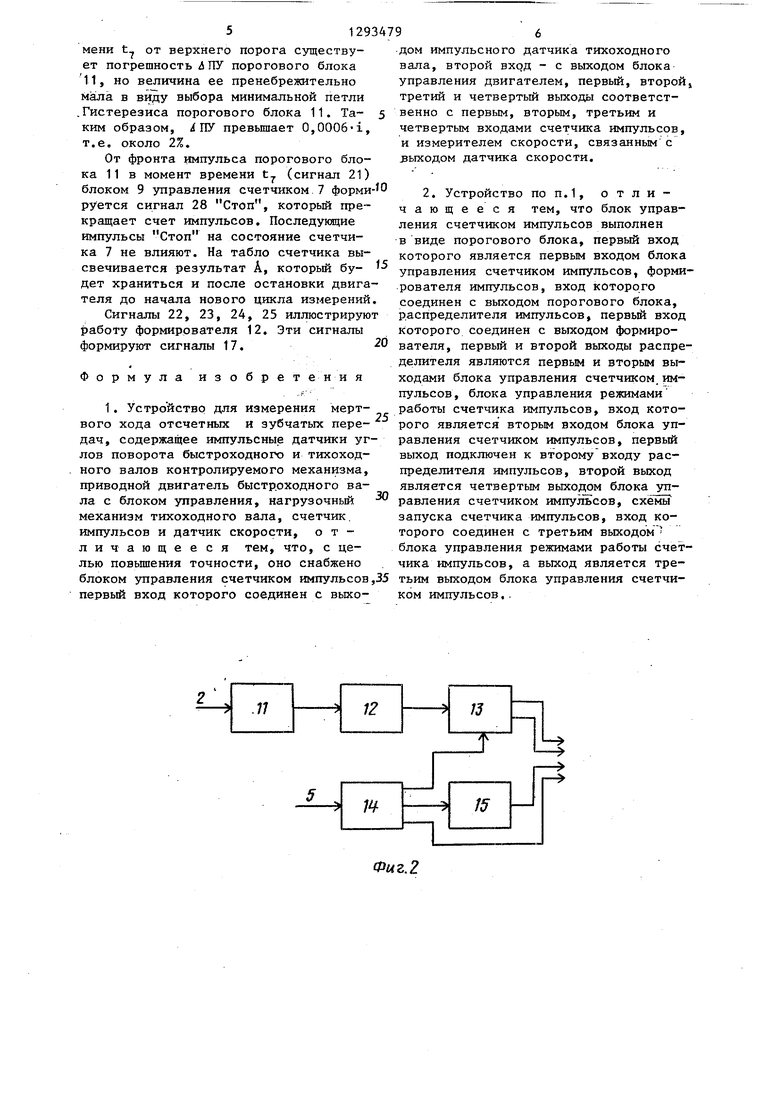
Блок 9 управления счетчиком 7 импульсов выполнен в виде порогового блока 11, первый вход которого является первым входом блока 9 управления,40 выходного вала контролируемого меха- счетчиком 7 импульсов, формирователя 12 импульсов, вход Которого соединен с выходом порогового блока 11, распределителя 13 импульсов, первый вход которого соединен .с выходом формирова-45 теля 12, первый и второй вых,оды распределителя 13 являются первым и вторым выходами блока 9 управления счет- -чиком 7;импульсов, блока 14 управления режимами работы счетчика 7 имнизма, t - текущее время.
Устройство работает следующим образом.
Нажатием кнопки Прямой ход (не показана) блока 5 управления двигателеи 4 включают приводной двигатель 4, .вращающий быстроходный вал контролируемого механизма 3- с импульсным дат- 50 .чиком 1 в прямом направлении, при
пульсов, вход которого является вторым входом блока 9 управления счетчиком импульсов 7, первый выход подклю-. чен к второму входу распределителя 13 импульсов, второй выход является четвертым выходом блока 9 управления счетчи1сом 7 импульсов, схемы 15 запуска счетчик- а 7 импульсоё, вход которого соединен с третьим выходом
5
блока 14 управления режимами работы счетчика 7 импульсов, а выход является третьим выходом блока 9 управления счетчиком 7 импульсов.
Для пояснения работы устройства на фиг,3 приняты следующие обозначения: 16 - сигнал Прямой ход блока управления двигателем, 17 - сигнал Стоп блока управления двигателем; 18 - сигнал Обратньй ход блока управления двигателем 19 - сигнал импульсного датчика быстроходного вала, 20 - сигнал импульсного датчика тихоходного вала 21 - сигнал на выходе порогового блока; 22 - продиф- ференцироваиньй и ограниченный сверху сигнал порогового блока; 23 - продифференцированный и ограниченный снизу сигнал порогового устройства; 24 - . инверсия сигнала 22J 25 - суммарный инверсный сигнал из сигналов 23 и 24, 26 - сигнал Вычитание блока управления счетчиком импульсов; 27 - сиг- нал Сброс блока управления счетчиком импульсов; 28 - сигнал Стоп блока управления счетчиком импульсов; 29 - сигнал Старт блока управления счетчиком импульсов; А - мертвый ход контролируемого механизма; 4ПУ - по- грешность порогового устройства, -ДК - погрешность (угловая) меяаду последним фронтом (или спадом) порогового устройства и положением, при котором происходит остановка выходного вала контролируемого механизма н-АК угловая погрешность между первым спадом или фронтом импульса порогового устройства и положением, при котором происходит начало движения
0
0
5
0 выходного вала контролируемого меха- 5
выходного вала контролируемого меха-
низма, t - текущее время.
Устройство работает следующим образом.
40 выходного вала контролируемого меха- 45
Нажатием кнопки Прямой ход (не показана) блока 5 управления двигате. леи 4 включают приводной двигатель 4, .вращающий быстроходный вал контролируемого механизма 3- с импульсным дат- 50 .чиком 1 в прямом направлении, при
этом блок 9 управления счетчиком 7 имгсульсов фор1 шрует рмпульс Старт (фиг,3), включающий счетчик 7, работающий в режиме вычитания (суммирует 5 импульсы со знаком минус), Тихоходный вал контролируемого механизма 3 при- водит в движение датчик 2, которьш вьщает сигнал синусоидальной формы на блок 9 управления счетчиком 7 импульсов, формирующий сигнал синусоидальной формы на блок 9 управления счетчиком 7 импульсов, формирующий сигнал прямоугольной формы со скважностью 2 от фронта и спада которых формируются короткие импульсы, идущие через распределитель импульсов блока 9 управления счётчиком 7 импульсов на вход Сброс счетчика 7 импульсов, после чего оператор производит остановку приводного двигателя 4 кнопкой Стоп (не показана) на блоке 5 управления двигателем 4, двигатель 4 продолжает вращаться по инерции, а счетчик 7 импульсов - работать в прежнем режиме, подсчитывая импульсы датчика 1 и периодически их сбрасьгоая на О. Полная остановка двигателя 4 происходит произвольно независимо от показаний счетчика 7 импульсов.
При нажатии кнопки Обратньй ход (не показана) блока 5 управления двигателем 4 сигнал с блока 5 управления двигателем 4 поступает на блок 9 управления счетчиком 7 импульсов, переключая счетчик 7 с режима Вычитание в режим Суммирование, при этом импульсы с датчика 1 поступают на счетчик 7 импульсов и алгебраически суммируются с имеющимся там результатом. Показания счетчика 7 со знаком - уменьшаются до нуля и далее возрастают со знаком +. На табло счетчика 7 фиксируется чистое значение мертвого хода контролируемого механизма 3, выраженное в делениях (импульсах) датчика 1 быстроходного звена.
По окончании мертвого хода контролируемого механизма 3 начинает вращаться его тихоходный вал, соединенный с датчиком 2, сигнал которого поступает на блок 9 управления счетчиком 7 импульсов и сформированный направляется на первый вход счетчика 7, прекращая его работу.
В момент времени t (фиг.З) сигна- дом 16 Прямой ход включают прямой ход приводного двигателя 4. При этом блок 9 управления счетчиком 7 импульсов запускает счётчик 7 импульсом 29 Старт, работающий в режиме Вычитание, и под воздействием сигнала 26 (вычитание). Счет импульсов в счетчике 7 импульсов производится со ,знаком -. Привозной двигатель 4 вращает быстроходный вал контролируемого механизма 3 и датчик 1 вырабаты
5
0
5
0
5
0
5
0
5
вает сигнал 19. Счетчик 7 подсчитывает количество импульсов в этом сигнале.
Вращение тихоходного вала контролируемого механизма 3 передается на датчик 2, вырабатывающий сигнал 20. Его частота в i раз меньше частоты сигнала датчика 1 (i - передаточное отношение контролируемого механизма).
Из сигнала датчика 2 пороговьй блок 11 формирует последовательность прямоугольных импульсов 21, от каждого фронта и спада которых формируются импульсы 17 Сброс, сбрасывающие на О показания счетчика 7 импульсов. I
При нажатии оператором кнопки
Стоп сигнал 17 в момент времени t отключает питание двигателя 4. В период с t по Ц вращение быстроходного и тихоходного валов контролируемого механизма 3 происходит по инерции, при этом счетчик 7 работает в прежнем режиме. В момент времени t- из сигнала 20 датчика 2 формируется последний перед остановкой вращения фронт или спад импульсного сигнала 21. До полной остановки валоя датчика 1 формирует -дК импульсов, которые фиксируются счетчшсом 7 -и хранятся в его памяти в период с t по tj. После полной остановки быстроходного вала оператор включает обратный ход. В момент включения обратного хода блок 9 управления счетчиком
7переводит счетчик в режим Суммирование подачей нулевого уровня сигнала 26. Сигнал 19 датчика 1, шкала которого теперь вращается в обратном направлении, формируется в зеркальном отображении и в счетчике 7 происходит уменьшение показаний за счет алгебраического суммирования с имею- щимся предыдущим результатом -4К.
8момент tg выбора мер-ввого хода контролируемого механизма 3 начинает
вращаться тихоходный вал и датчик 2 формирует сигнал в зеркальном отображении. До момента срабатывания порогового блока 11 выходной вал, повернется в обратную сторону на такой же угол, на которьш он повернулся в пе- риод с tj по t. , и датчик 2, связанный через кинематическую цепь контролируемого механизма 3 с тихоходным валом, сформирует +АК импульсов. При работе порогового блока 11 в момент tj от нижнего порога, а в момент времени t от верхнего порога существует погрешность 4ПУ порогового блока 11, но величина ее пренебрежительно мала в виду выбора минимальной петли .Гистерезиса порогового блока 11. Та- 5 КИМ образом, 4ПУ превышает 0,0006-1, т.е. около 2%.
От фронта импульса порогового блока 1 1 в момент времени t (сигнал 21) блоком 9 управления счетчиком. 7 форми- О руется сигнал 28 Стоп, который прекращает счет импульсов. Последующие импульсы Стоп на состояние счетчика 7 не влияют. На табло счетчика выдом импульсного датчика тихоходного вала, второй вход - с выходом блока управления двигателем, первый, второйj третий и четвертый выходы соответственно с первым, вторым, третьим и четвертым входами счетчика импульсов, и измерителем скорости, связанным с выходом датчика скорости.
2. Устройство ПОП.1, отличающее ея тем, что блок управления счетчиком импульсов выполнен в виде порогового блока, первый вход которого является первым входом блока
свечивается результат А, который бу- -5 управления счетчиком импульсов, формидет храниться и после остановки двигателя до начала нового цикла измерений. Сигналы 22, 23, 24, 25 иллюстрируют работу формирователя 12. Эти сигналы формируют сигналы 17.
Формула изобрет е н и я
1. Устройство для измерения мертвого хода отсчетных и зубчатых пере- дач, содержащее импульсные датчики углов поворота быстроходного и тихоходного валов контролируемого механизма, приводной двигатель быстроходного ва20
30
ла с блоком управления, нагрузочньй механизм тихоходного вала, счетчик.
20 вателя, первый и второй выходы распределителя являются первым и вторым выходами блока управления счетчиком,импульсов, блока управления режимами работы счетчика импульсов, вход которого является вторым входом блока управления счетчиком импульсов, первый выход подключен к второму входу распределителя импульсов, второй выход является четвертым выходом блока управления счетчиком импульсов, схемы запуска счетчика импульсов, вход которого соединен с третьим выходом блока управления режимами работы счетчика импульсов, а выход является треимпульсов и датчик скорости, отличающееся тем, что, с целью повышения точности, оно снабжено блоком управления счетчиком импульсов ,35 тьим выходом блока управления счетчи- первый вход которого соединен с выхо- ком импульсов,.
дом импульсного датчика тихоходного вала, второй вход - с выходом блока управления двигателем, первый, второйj третий и четвертый выходы соответственно с первым, вторым, третьим и четвертым входами счетчика импульсов, и измерителем скорости, связанным с выходом датчика скорости.
2. Устройство ПОП.1, отличающее ея тем, что блок управления счетчиком импульсов выполнен в виде порогового блока, первый вход которого является первым входом блока
управления счетчиком импульсов, формирователя импульсов, вход которого соединен с выходом порогового блока, распределителя импульсов, первый вход Которого соединен с выходом формиро0 вателя, первый и второй выходы распределителя являются первым и вторым выходами блока управления счетчиком,импульсов, блока управления режимами работы счетчика импульсов, вход которого является вторым входом блока управления счетчиком импульсов, первый выход подключен к второму входу распределителя импульсов, второй выход является четвертым выходом блока управления счетчиком импульсов, схемы запуска счетчика импульсов, вход которого соединен с третьим выходом блока управления режимами работы счетчика импульсов, а выход является тре0
5 тьим выходом блока управления счетчи- ком импульсов,.
Фиг. 2
I I I I
«ftNwv Sitiv 1 Ч) N. v S V 3 «NJ N «м«у «vJcJ
I
4-0
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля мертвого хода механизмов | 1980 |
|
SU945638A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ МЕРТВОГО ХОДА МЕХАНИЗМОВ | 1973 |
|
SU386234A1 |
| Электропривод постоянного тока с двухступенчатой механической передачей | 1986 |
|
SU1410250A1 |
| Устройство для контроля кинематической погрешности передач | 1985 |
|
SU1270550A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2078324C1 |
| Электропривод постоянного тока | 1985 |
|
SU1277301A1 |
| Устройство для выделения сигнала верхней мертвой точки двигателя внутреннего сгорания | 1982 |
|
SU1038533A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ МЕРТВОГО ХОДА МЕХАНИЗМОВ | 1973 |
|
SU377613A1 |
| Способ измерения углового положения вала | 1989 |
|
SU1728642A1 |
| Устройство для управления пневмомеханической прядильной машиной | 1985 |
|
SU1294885A1 |
Изобретение относится к машиностроению, а именно к средствам контроля зубчатых передач. Цель изобретения - повьшение точности измерения люфта путем подсчета количества импульсов датчика быстроходного звена за счет использования управляемого реверсивного счетчика импульсов. Устройство дополнительно снабжено блоком 9 управления счетчиком 7 импульсов. При вращении быстроходного и тихоходного валов контролируемого механизма 3 в одну из сторон счетчик 7 считает импульсы прямого хода. При вращении в другую сторону счетчик 7 фиксирует количество импульсов, вьщаваемых датчиком 1 до выбора контролируемым механизмом 3. мертвого хода, и результат выдается в количестве импульсов датчика 1 на табло счетчика 7. Относительная погрешность измерения мертвого хода 2%. 1 з.п.ф-лы, 3 ил. « сл с ю &д 4i Ч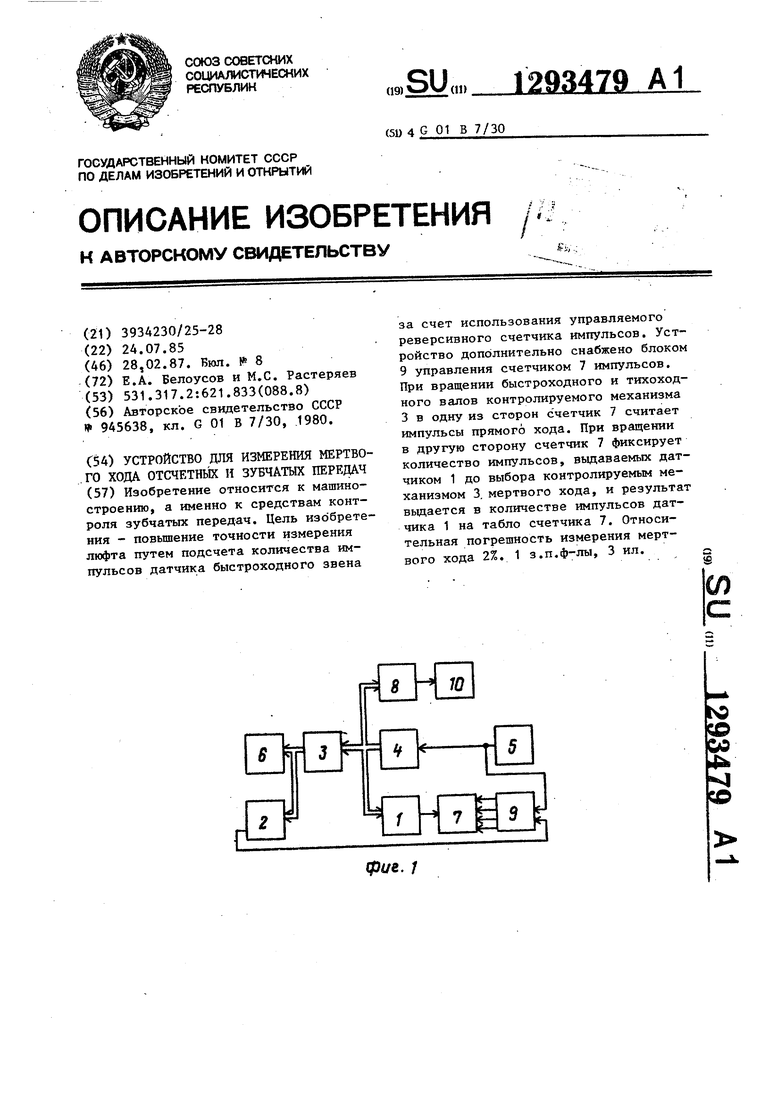
Составитель Б. Афонский Редактор М. Товтин Техред Л.Сердюкова Корректор И. Эрдейи
Заказ 370/41 Тираж 678Подписное
ВНИИПИ Государственного комите ра СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Устройство для контроля мертвого хода механизмов | 1980 |
|
SU945638A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
