f1 Изобретение относится к машиностроению, а именно к средствам контроля зубчатых передач. Цель изобретения - повышение точности, производительности и информативности контроля за счет учета неравномерности вращения быстроходного звена, применения быстродействунщего вычислительного устройства и уменьшения дискретности датчика тихоходного звена. На чертеже изображена блок-схема устройства для контроля кинематической погрешности передач. Устройство для контроля кинематической погрешности передач включает в себя импульсные датчики 1 и 2 быст роходного и тихоходного звеньев конт ролируемой передачи 3, подключенные к ним, соответственно первый и второ счетчики-4 и 5 импульсов, два ключа 6 и 7, блок 8 управления, вычислительный блок 9, последовательно соединенные запоминаюш;ий и регистрглрую1ЦИЙ блоки 10 и 11, причем вычислительньй блок 9 выполнен в виде после довательно соединенных множительного и вычитающего блоков 12 и 13 и суммирующего блока 14, выход которого соединен со вторым входом вычитающег блока 13. Далее устройство снабжено оперативньЕм запоминающим блоком 15, первый вход которого соединен с выходом первого счетчика 4 импульсов, счетчи1сом 16 адреса, выход которого подключен ко второму входу оператив.ного запоминающего блока 15, первый, вход - к выходу первого ключа 6, выход оперативного запоминающего блока 15 соединен с первым входом второго ключа 7, выход второго ключа 7 подключен к первому входу множительного блока 12, двумя компараторами 17 и 18 первый вход первого компаратора 17 связан с выходом второго счетчика 5 импульсов, выход - с вторым входом второго счетчика 5 и первым входом первого ключа 6, четырьмя кодонабирателями 19 - 22, первый из которых соединен с вторым входом первого ком паратора 17, второй - с вторым входо второго компаратора 18, третий - с вторым входом множительного блока 12 четвертый - с первым входом суммирующего блока 14, третьим счетчиком 23 импульсов, вход которого подключен к выходу первого компаратора 17, выход - к первомз входу второго ком02паратора 18, выход второго компаратора 18 соединен с первым входом блока 8 управления, с вторым входом первого ключа бис вторым входом регистрирующего блока 11, регистром 24 текущего значения суммы, выход которого подключен ко второму входу суммирующего блока 14, первый вход - к первому выходу суммирующего блока 14, выход регистрирующего блока 11 соединен со вторым входом блока 8 управления, выход вычитающего блока 13 соединен с входом запоминающего блока 10, первый выход блока 8 управления подключен ко вторым входам счетчики 16 адреса и регистра 24 текущего значения суммы, второй и третий - к вторым выходам второго ключа 7 и запоминающего блока 10 соответственно, а первый счетчик 4 импульсов выполнен реверсивным. Устройство работает следующим образом. Перед запуском контролируемого механизма 3 на кодонабирателе 19 устанавливают число п, определяющее необходимый интервал контроля (т.е. коэффициент деления числа импульсов датчика 2). На кодонабирателе 20 устанавливают число контролируемых положений N, определяющих диапазон контроля передачи. На кодонабирателе 21 устанавливают цену импульса А. датчика 1, приведенную к тихоходному звену А i где А - цена импульса датчика 1; io - расчетное передаточное число контролируемой передачи. На кодонабирателе 22 устанавливают цену А,,у импульса с компаратора 17 АКУ Ау п где Ау - цена импульса датчика 2; п - число, набранное в кодонабирателе 19. Затем запускают контролируемый механизм 3. При зтом сигналы с датчиков 1 и 2 поступают на соответствующие счетчики 4 и 5 импульсов, Со счетчика 4 сосчитанное текущее число импульсов подается в оперативный запоминающий блок 15 (ОЗБ), в котором значение числа импульсов, поступивш:их с датчика быстроходного звена, записывается в соответствующие ячейки памяти. Запись 312705 осуществляется по команде счетчика 16 адреса, который управляет импульсами датчика 2, прошедшими через счетчик 5 и компаратор 17. Таким образом, в ОЗБ 15записывается массив количества 5 импульсов, характеризующих положение быстроходного звена, соответствующих контролируемым положениям тихоходного звена. В момент времени, когда счетчик 22 сосчитает число импульсов, со-Ю ответствующее числу контролируемых положений N тихоходного звена, компаратор 18 закроет ключ 6 и включит регистрирующий блок 11 и блок 8 управления. На этом заканчивается про цесс измерения погрешности и начинается процесс обработки информации записанной в ОЗБ 15 с целью получени результатов измерения кинематической погрешности. При этом регистрирующий блок 11 тактирует блок 8 управления, задавая ему скорость выдачи управляющих сигналов Hj, а и aj, сдвинутых по вре мени, например с помощью линий за- держки блока 8 управления. По сигналу а., поступающему на счетчик 16 адреса, число импульсов, записанное в соответствующую ячейку памяти (адреса) ОЗБ 15, через ключ 7, который открывается по сигналу а блока 8 управления, поступает в множительньш блок 12. Множительный блок 12 осущес ляет перемножение этого -числа импзль сов К; на число А , набранное на кодонабирателе 21, с выхода множительного блока 12 на блок 13 вычитания поступает, таким образом, действительное значение угла поворота тихоходного звена о . KI А -с 1Г Расчетное значение угла поворота тихоходного зве-на получают с помошькГ суммирующего блока 14, регистра 24 текущего значения суммы и кодонабирателя 22 следующим образом. Сигнал aj с блока В управления поступает на регистр 24, по команде которого суммирующий блок 14 производит суммирование числа, набранного в кодонабирателе 22 со значением сум мы, имеющейся в регистре 24 (первоначальное значение суммы равно нулю) и заносит его в блок 13 вычитания и в регистр 24. Расчетное значение угл поворота Цр , таким образом, равно 0 Блок 13 вычитания позволяет получить значение кинематической погрешности передачи ЛЧ; в каждом контролируемом положении как разность между действительным и расчетным углом по орота тихоходного звена тс д f л,. -д, , . L Полученные значения кинематической погрешности записываются в запоминаю-. щий блок 10 по сигналу а блока 8 управления, а затем поступают на регистрируюЕ1ий блок 11. Формула изобретения Устройство для контроля кинематической погрешности передач, содержащее импульсные датчики быстроходного и тихоходного звеньев контролируемой передачи, подключенные к ним соответственно первый и второй счетчики импульсов, два ключа, блок управления, вычислительньш блок, последовательно соединенные запоминающие и регистрирующий блоки, отличающееся тем, что, с целью повьппения точности, производительности и информативности контроля, вычислительный блок выполнен в виде последовательно соединенных множительного и вычитаю1цего блоков и суммирующего блока, выход которого соединен с вторым входом выЧ1 тающего блока, устройство снабжено оперативным запоминающим блоком, первый вход которого соединен с -выходом первого счетчика импульсов, счетчиком адреса, выход которого подключен к второму входу оперативного запоминающего блока, первый вход - к выходу первого ключа, выход оператив- ( ного запоминающего блока соединен с первым входом второго ключа, вых-од второго ключа подклгочен к первому входу множительного блока, двумя компараторами, первый вход первого компаратора связан с выходом второго счетчика импульсов, выход - с вторым входом второго счетчика импульсов и первым входом первого ключа, четырьмя кодонабирателями, первьй из которых соединен с вторым входом первого компаратора, второй - с вторым входом второго компаратора, третий - с вторым входом множительного блока, четвертый - с первым входом суммирующего блока, третьим счетчико м импульсов, вход которого подключен к выходу первого компаратора, выход -. к первому входу второго компаратора, выход второго компаратора соединен с перв1э1м входом блока управления и с вторым входом первого ключа, и с вторым входом- регистрирующего блока, регистром текущего значения суммы, выход которого подключен к второму входу суммирующего блока, первый вход к первому выходу суммирующего блока, выход регистрирующего блока соединен с вторым входом блока управления, выход вычитающего блока соединен с входом запоминающего блока, первый выход блока управления подключен к вторым входам счетчика адреса и регистра тянущего значения суммы, второй и третий - к вторым выходам второго ключа и запоминающего блока соответственно, а первый импульсов выполнен реверсивным.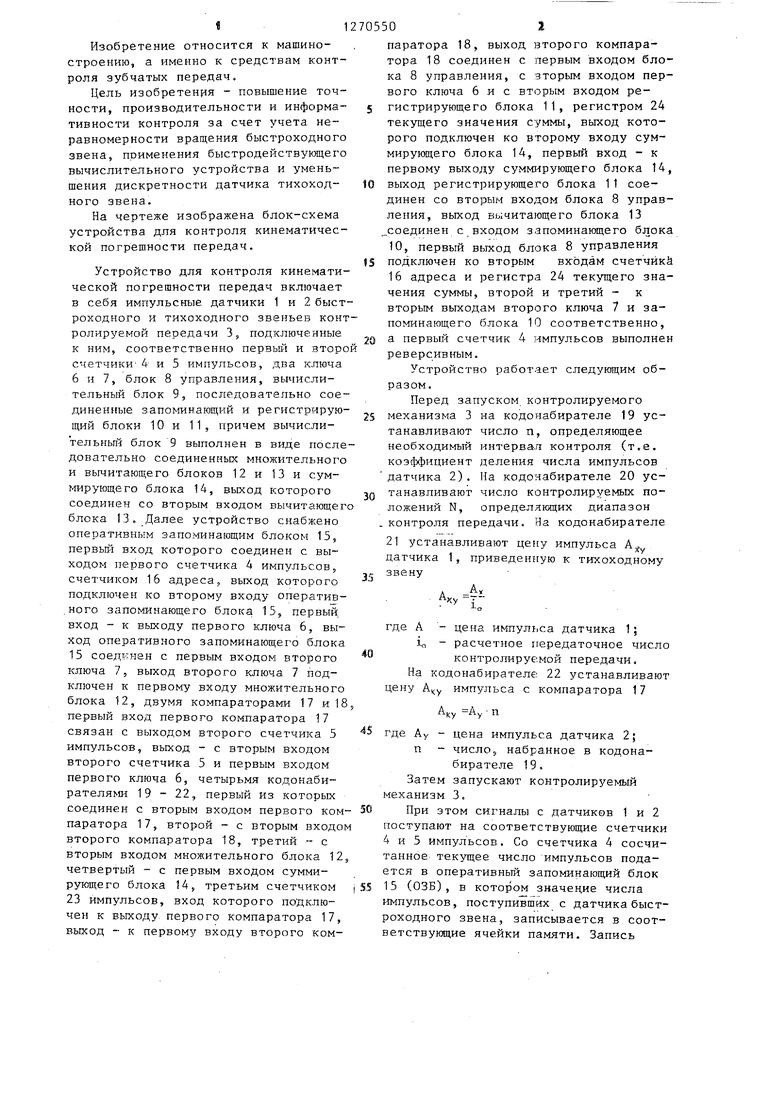
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля кинематической погрешности передач | 1985 |
|
SU1362912A1 |
| Устройство для измерения погрешностей деления лимбов | 1986 |
|
SU1411583A1 |
| Устройство для контроля погрешностей лимбов | 1986 |
|
SU1384951A1 |
| Устройство для передачи информации с обратной связью | 1986 |
|
SU1322356A1 |
| Устройство для измерения мертвого хода отсчетных и зубчатых передач | 1985 |
|
SU1293479A1 |
| Устройство для измерения колебаний скорости перемещения | 1985 |
|
SU1303944A1 |
| Способ измерения угловой погрешности положения штрихов лимба | 1986 |
|
SU1326884A1 |
| Устройство для адаптивной дискретизации | 1982 |
|
SU1070566A1 |
| Устройство для измерения мощности | 1990 |
|
SU1751685A1 |
| УСТРОЙСТВО СЧИТЫВАНИЯ и ПРЕОБРАЗОВАНИЯ | 1964 |
|
SU164718A1 |
Изобретение Относится к машиностроению, а именно к средствам контроля зубчатьк передач. Цель изобретения - повышение точности, производительности и информативности контроля за счет учета неравномерности вращения быстроходного звена, применения быстродействующего вычислительного устройства и уменьшения дискретности датчика тихоходного звена. Для этого вычиcлиteльный блок 9 выполнен в виде умножительного блока 12, блока 13 вычитания и суммирующего блока 14. На блок 13 вычитания поступает сигнал, несущий информацию, о действительном угле поворота тихоходного звена и с суммирующего блока 14 теоретическое значение угла повос рота тихоходного звена. Блок 13 вы® читания выдает значение кинематичес(Л кой погрешности на запоминающий блок 10 и регистрирующий блок 11. 1 ил.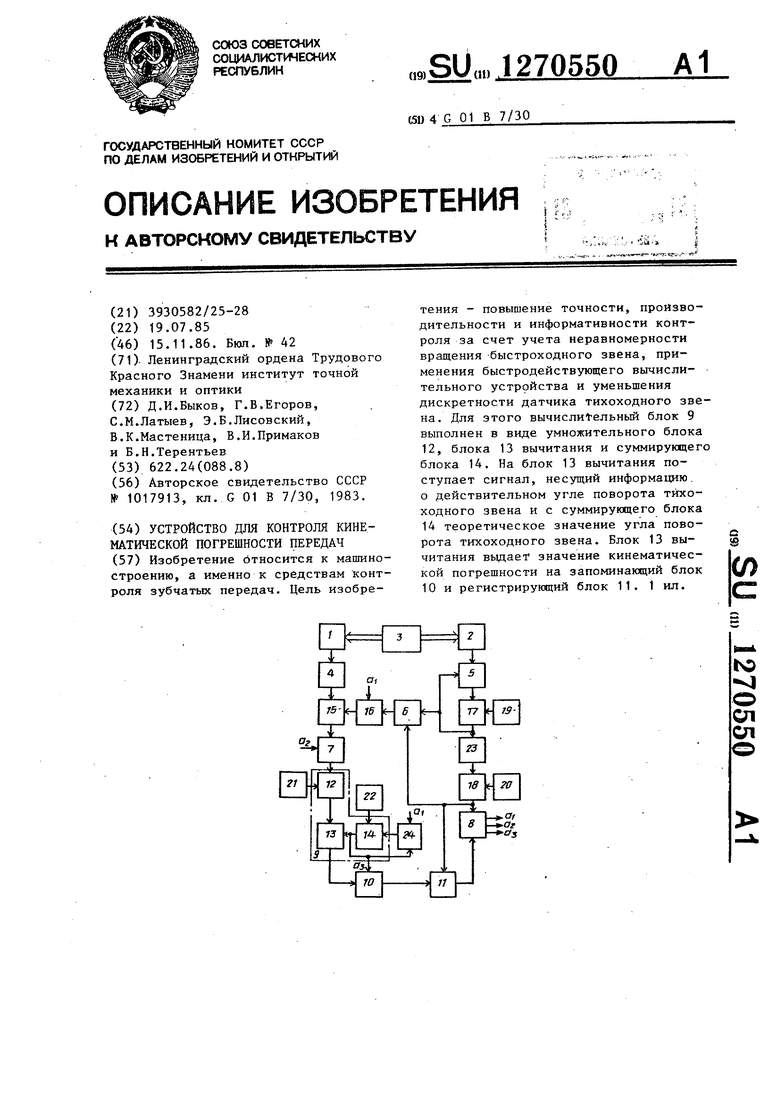
| Цифровое устройство для измерения кинематической погрешности зубчатых передач | 1981 |
|
SU1017913A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
