Изобретение относится к электромашиностроению, а именно к устройствам измерения мертвых ходов механизмов электроприводов без съема их с изделий, в которых они выполняют рабочие функции, и может быть исползовано во всех отраслях народного хозяйства для встроенного (безразборного) контроля мертвого хода механических передач.
Цель изобретения - упрощение датчика контроля мертвого хода механической передачи в процессе эксплуатации электропривода.
На фиг, 1 изображена блок-схема электропривода с устройством для встроенного контроля мёртвого хода механизмов; на фиг, 2 - временные диаграммы работы устройства.
Электропривод содержит контролируемую механическую передачу 1, нагрузку 2 приводного двигателя 3 постоянного тока, датчик 4, выход которого соединен с входом формирователя 5 импульсов, выход которого соединен с входом коммутатора 6, Выход коммутатора 6 соединен с одним из входов логической схегф И 7, генератора 8 импульсов, выход которого подключен к второму входу логической схемы И 7, Кроме того, электропривод содержит счетную схему 9 с табло, вход которой соединен с выходом логической схемы И 7.
Нагрузка 2, механическая передача 1 и привод двигателя 3 являются одновременно элементами системы, в которой выполняет рабочие функции контролируемая механическая передача 1 ,
В качестве датчика 4 используется активное сопротивление малой величины, включенное последовательно в якорную обмотку приводного двигателя 3, Величина сопротивления датчика 4 выбирается на один-два порядка меньше сопротивления обмотки якоря двигателя 3, поэтому датчик 4 практически не оказывает влияние на режим работы двигателя 3, Роль формирователя 5 импульсов выполняет дифференцирующая цепь и импульсный усилитель-ограничитель, а коммутатора 6 и генератора импульсов 8 - тригер и блокинг-генератор соответственно. Логическая схема И 7 выполнена на диодах. Счетная схема 9 включает в себя двоичный счетчик, дешиф
5
0
8
5
10
15
0
5
0
55
ратор, переводящий двоичные числа в десятичную форму, и табло информации ,
Устройство работает следующим образом.
Перед началом процесса измерения мертвый ход механической передачи 1 устанавливают в максимальное положение. Генератор 8 импульсов вырабатывает импульсы с периодом следования Т; (фиг, 2г), которые подаются на один из входов логической схемы И 7, На втором входе логической схемы И 7 сигнала нет и он закрыт.
В момент времени t, (фиг, 2) запускается приводной двигатель 3, В обмотке якоря 3 возникает импульс пускового тока, который вызьшает импульс напряжения на датчике 4 U- и, (момент времени t, фиг, 2а), Фронт импульса напряжения датчика 4 подается на формирователь 5 импульсов, дифференцируется, усиливается и ограничивается. Сформированный импульс напряжения формирователя 5 (момент времени t, фиг, 26) подается на вход коммутатора 6 и приводит его в состояние, характеризуемое высоким потенциалом на выходе (момент времени t, , фиг, 2в), С выхода коммутатора b высокий потенциал подается на второй вход логической схемы И 7, которая с момента времени t пропускает импульсы, вырабатываемые генератором 8 импульсов, на счетную схему 9, последняя начинает счет импульсов,
В интервал времени t t t (фиг, 2) двигатель 3 приходит во вращение, пусковой ток и напряжение на датчике 4 уменьшаются по экспоненте (интервал t t t , фиг, 2а), на тихоходный вал механической передачи 1 не двигается, так как Мертвый ход еще не выбран. Счетная схема 9 производит счет импульсов, поступающих с генератора 8 импульсов, через открытую схему И 7„ Входной сигнал счетной схемы 9 показан на фиг, 2д,
В момент времени t- (фиг, 2) мертвый ход выбранр приводится во вращение тихоходный вал механической передачи 1, нагрузка на двигатель 3 скачкообразно возрастает, что вызывает импульс тока якоря двигателя 3 и импульс напряжения на датчике U (момент времени t, фиг, 2а), Импульс напряжения датчика 4 поступает
3
на формирователь 5 импульсов, (напряжение на выходе U,,), который вырабатывает второй импульс (момент времени t, фиг. 26). Этот импульс с формирователя 5 подается на комму- татор 6 и переводит его в состояние нулевого потенциала на выходе (момент времени t , фиг. 2в). Нулевой потенциал выхода коммутатора 6 (U) подается на логический элемент И 7 и закрывает его. Поступление импульсов с генератора 8 импульсов (U|:) на вход счетной схемл 9 прекращается (момент времени t, фиг. 2д). На табло индикации счетной схемы 9 (U) высвечивается число импульсов п, сосчитанное за время выбора мертвого хода At, Так как период повторегдая импульсов Т, вьфабатываемых генератором 8 импульсов, известен, то
4t
2 и(1)
Определяют математическое выражение , по которому при известной величине at можно рассчитать величи- ну мертвого хода.
Дифференциальное уравнение движения двигателя 3 имеет вид
V-3P(t).S.. (2)
где J(t) - текущая угловая скорость вращения двигателя 3 в переходном режиме; Яц- номинальная скорость вращения двигателя 3 в установившемся режиме; - Та - злектромеханическая постоянная времени двигателя 3.
Величины 2 и Т. имеются в технической документации и справочниках, кроме того, их достаточно просто определить экспериментально.
Подставляя выражение (1) в выражение (2) и рещая его, получают расчетную формулу мертвого хода
сЛ баДпТ +Т 5(),,3, (3)
.Представляют выражение (3) в виде удобном для проведения практических вы шслений. В технической документа
5 0 5 0
5
5
5 .
0
3014
ции и справочниках номинальная скорость вращения Л приводится в размерности об/мин.
При расчете мертвого хода oL по формуле (3) в нее необХ одимо подставить 9. (об/мин); , (с); Т - период повторения импульсов генератора импульсов 8 (с); п - количертво импульсов, снятое с табло информации счетной схемы 9 (величина безразмерная) .
После вычисления мертвого хода 1 устройство приводится в исходное состояние, и в случае необходимости переходят к следующему контрольному положению механической передачи I, В каждом контрольном положении перед измерением необходимо установить максимальный мертвый ход.
Предложенное устройство позволяет контролировать мертвый ход механизмов с электроприводом постоянного тока без демонтажа их с изделий, в которых они выполняют свои рабочие функции.
Формула изобретения
Электропривод постоянного тока, содержащий электродвигатель, соединенный с нагрузкой через механическую передачу, датчик контроля мертвого хода механической передачи, встроенный в электродвигатель, коммутатор, соединенный с входом логической схемы И, выход которой подключен к счетной схеме, отличающийся тем, что, с целью упрощения датчика контроля мертвого хода механической передачи в процессе эксплуатации электропривода, он снабжен формирователем импульсов, генератором импульсов, а датчик контроля выполнен в виде активного сопротивления, включенного последовательно в якорную цепь электродвигателя, при этом вход формирователя импульсов подключен к выходу датчика контроля, а выход его соединен с коммутатором, причем выход генератора импульсов соединен р вторым входом логической схемы И.
с/г2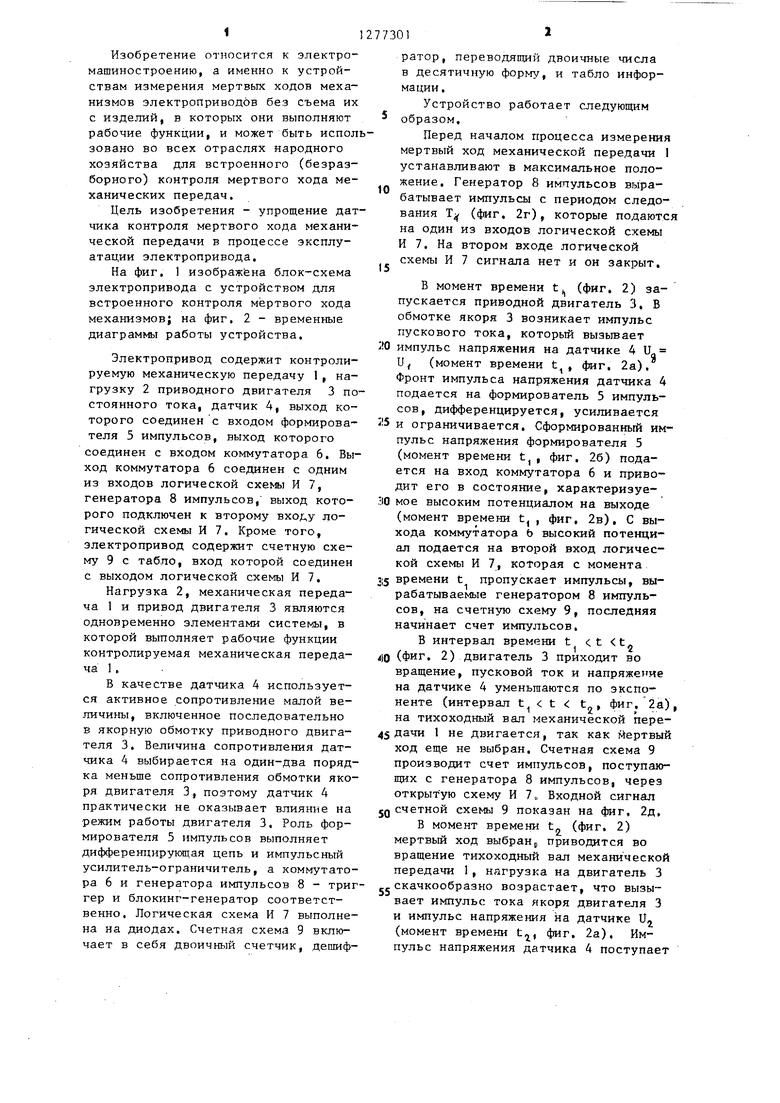
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля мертвого хода механической передачи электропривода | 1988 |
|
SU1557633A1 |
| Электропривод постоянного тока с двухступенчатой механической передачей | 1986 |
|
SU1410250A1 |
| Устройство для контроля мертового хода механической передачи электропривода | 1989 |
|
SU1677792A1 |
| Электропривод переменного тока | 1984 |
|
SU1328918A1 |
| Управляемый вентильный электродвигатель | 1978 |
|
SU746827A1 |
| Синхронизированный бесконтактный электропривод постоянного тока | 1977 |
|
SU731521A1 |
| Электропривод | 1985 |
|
SU1295497A1 |
| Многодвигательный электропривод переменного тока | 1985 |
|
SU1307521A1 |
| Управляемый вентильный электродвигатель | 1979 |
|
SU860225A2 |
| Система позиционирования с двухзонным регулированием скорости электропривода | 1991 |
|
SU1798765A1 |

Изобретение относится к электромашиностроению, а именно к устройствам измерения мертвых ходов механизмов электроприводов. Цель изобретения - упрощение датчика контроля мертвого хода механической передачи в процессе эксплуатации электропривода. Электропривод содержит контролируемую механическую передачу 1, нагрузку 2 приводного двигателя постоянного тока 3, датчик 4, выход которого соединен с входом формирователя импульсов 5, вход которого соединен с входом коммутатора 6. Выход коммутатора 6 соединен с одним из входов логической схемы И 7. Выход генератора импульсов 8 подключен к второму входу логической схемы И 7, выход которой соединен со счетной схемой 9 с табло. Изобретение позволяет контролировать мерт- вйй ход механизмов с электроприводом постоянного тока без демонтажа их с изделий, в которых они выполняют свои рабочие функции. 2 ил. с (П ю vj vj со о tfut.f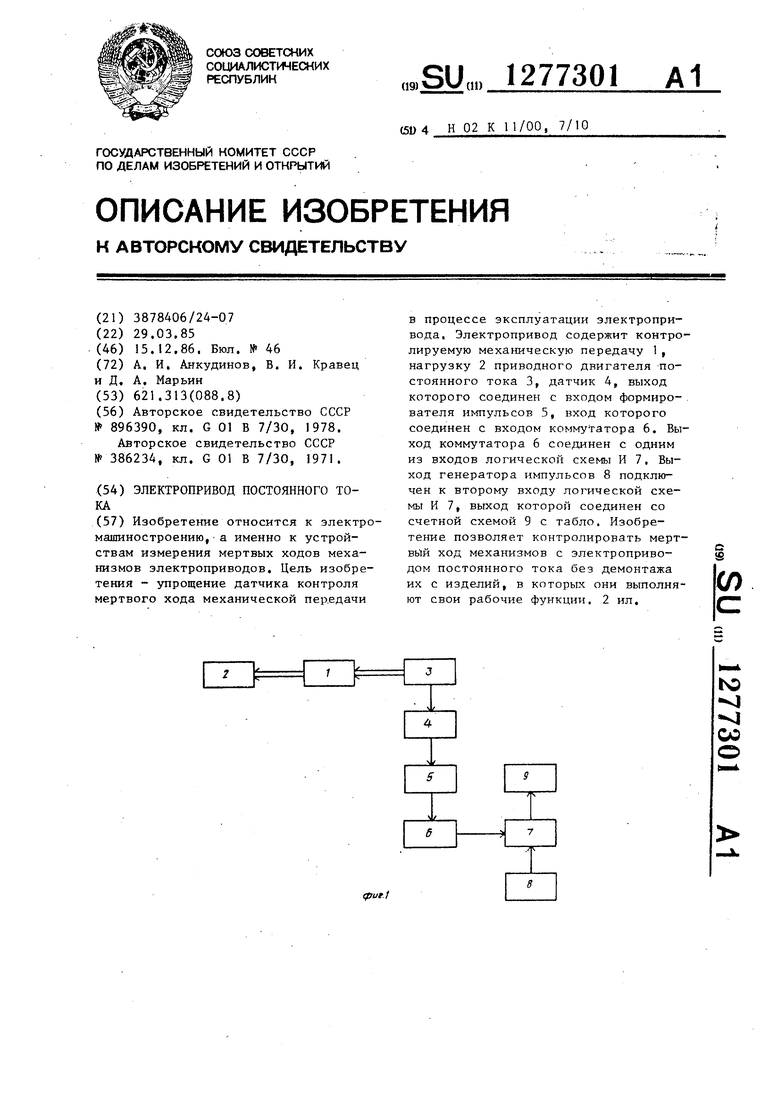
| Способ контроля кинематической погрешности зубчатых передач | 1977 |
|
SU896390A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ МЕРТВОГО ХОДА МЕХАНИЗМОВ | 0 |
|
SU386234A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
