Изобретение относится к машиностроению и может быть использовано для преобразования движения в двигателях внутреннего сгорания, компрессорах и насосах.
Цель изобретения - повышение несущей способности механизма преобразования движения.
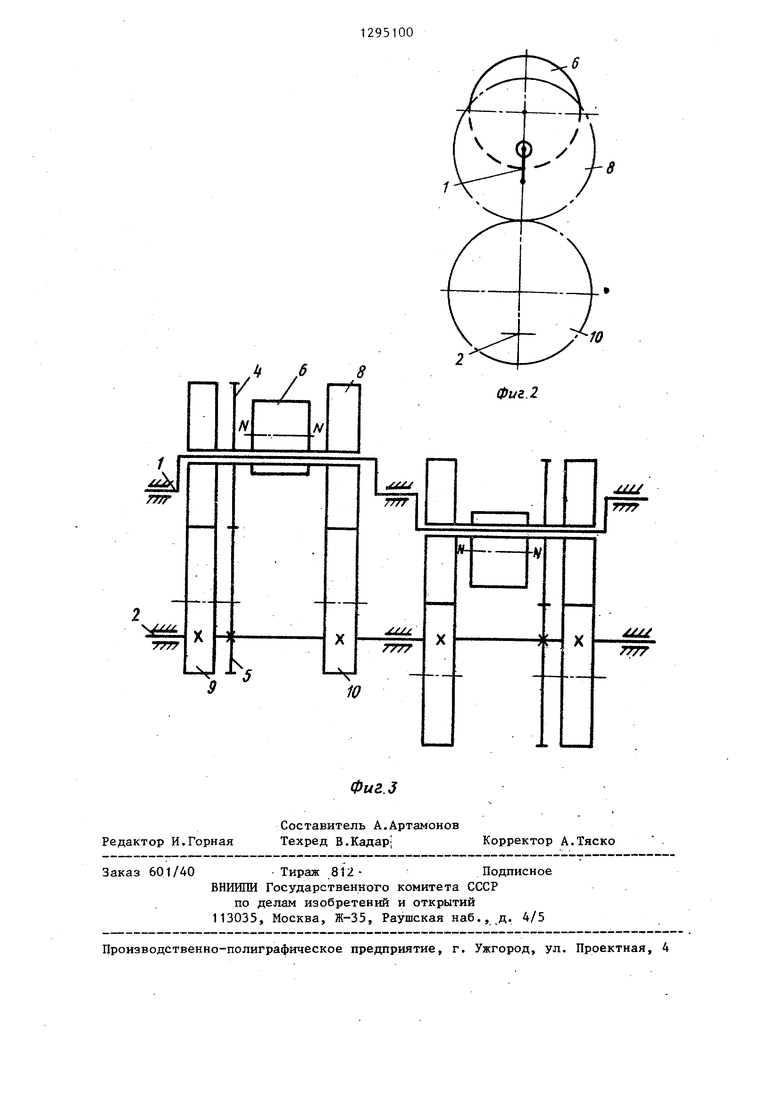
На фиг. 1 изображена схема предлагаемого механизма; на фиг, 2 - траектория движения-оси N-N ведомого звена и положение осей основного (кривошипного) и дополнительного валов ; на фиг. 3 - схема двухсекцион ного механизма.
Механизм преобразования движения содержит основной (кривошипный) 1 и дополнительный 2 валы, двухпоточный механизм синхронизации их вращения, который состоит из кинематической связи 3 (например, шестеренчатого типа) и передачи внешнего зацепления между зубчатыми колесами 4 и 5 одинакового диаметра. На кривошипной шейке основного вала шарнирно установлено ведомое звено 6 (с эксцентриситетом) , которое жестко связано с зубчатым колесом 4 и- парой дисков 7 и 8, находящихся в постоянном контакте с парой дисков 9 и 10, эксцентрично установленных на дополнительном валу 2.
При этом диаметры дисков 7-10 равны между собой, а зубчатое колесо 5 установлено на дополнительном Baofiy 2 с эксцентриситетом,, равным радиусу кривошипной окружности основного вала 1, эксцентриситету ведомого звена 6 и эксцентриситетам дисков 7 и 8 установленных на дополнительном валу 2.
Нагрузочная способность механизма повьш1ается за счет перераспределения сил, действующих на ведомое звено 6, между валами 1 и 2 (благодаря постоянному контакту дисков 7-10, воспринимающих нагрузку, и совмещению траектории движения оси ведомого звена б с плоскостью, в которой расположены оси основного и дополнительного валов).
При необходимости механизм может быть выполнен двзпссекционным (фиг. 3 В этом случае основные (кривошипные) и дополнительные валы первой и вто рой секций жестко связаны, а угол развала кривошипов основных валов секций 180°. При таком выполнении ме- ханизма отпадает необходимость в ,
установке кинематической связи 3, обеспечивающей синхронизацию вращения основного и дополнительного валов механизма при односекционном выполнении.
Механизм (при преобразовании вращательного движения в поступательное) работает следующим образоьк
Вращение от дополнительного вала 2 через синхронизирующую кинематическую связь 3 передается основному (кривошипному) валу 1. Одновременно зубчатое колесо 5, эксцентрично установленное на дополнительном валу 2, приводит во вращение зубчатое колесо 4, жестко связанное с ведомым .звеном 6. При этом последнее совершает сложное , состоящее из вращения вместе с кривошипным валом 1 с угловой скоростью сО и вращения вокруг шейки кривошипного вала с угловой скоростью .-сД В результате сложения этих вращений ось N-N ведомого звена 6 совершает возвратно-поступательное движение в плоскости расположения осей основного и дополнительного валов.
Движение может быть преобразовано и в обратном направлении.
Формула изобретения
Механизм преобразования вращательного движения Б поступательное и наоборот, содержащий основной (кривошипный) и дополнительный валы и механизм синхронизации их вращения, отличающийся тем, что, с целью повьш1ения несущей способности, на кривошипной шейке основного вала шарнирно установлено ведомое звено, механизм синхронизации выполнен двухпоточным в виде зубчатой передачи внешнего зацепления, одно из колес которой жестко связано с ведо-, звеном, а второе эксцентрично установлено на дополнительном валу, и кинематической связи, обеспечивающей одностороннее вращение валов с . равньгми скороетями при этом ведомое звено жестко связано по крайней мере с одним диском, контактирующим с другим диском эксцентрично установленным на дополнительном валу, а радиус кривошипной окружности равен эксцентриситетам ведомого звена, зубчатого колеса и диска, установленных на дополнительном валу.
. / 8
10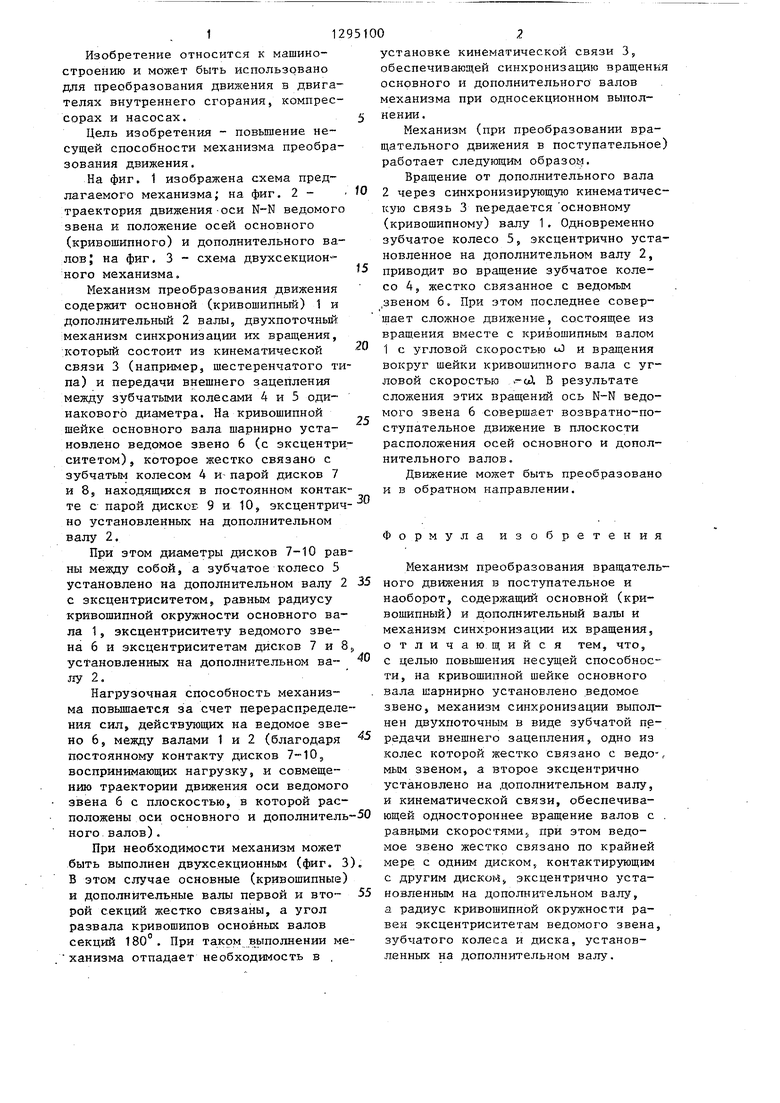
Изобретение относится к области машиностроения и может -быть использовано для преобразования движения в двигателях внутреннего сгорания, компрессорах и насосах. Целью изобретения является повьшение несущей способности механизма преобразования движения. При преобразовании враща411 ЛЧ S тельного движения в поступательное вращение оно от дополнительного вала 2 через синхронизирующую кинематическую связь 3 передается основному (кривошипному) валу 1. Одновременно зубчатое колесо 5, зксцентрично установленное на дополнительном валу 2, приводит во вращение зубчатое колесо 4, жестко связанное с ведомым звеном 6. Цри этом ведомое звено 6 совершает сложное движение, состоящее из вращения вместе с кривошипным валом 1 с угловой скоростью и вращения вокруг шейки кривошипного вала с угловой скоростью -и). В результате слежения этих вращений ось N-N ведомого звена 6 совершает возвратно-поступательное движение в плоскости расположения осей основного 1 и дополнительного 2 валов. Движение может быть преобразовано ив обратном направлении. 3 ил. i (Л to со ел Ifl Xj х К 5 Фиг.1 ю
Составитель А.Артамонов Редактор И.Горная Техред В.Кадар;Корректор А.Тяско
Заказ 601/40 Тираж.812-Подписное
ВНИШШ Государственного комитета СССР
по делам изобретен и открытий 113035, Москва, Ж-35, Раушская наб., .д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
0мг. J
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛОКАЛЬНОЙ ВЕЛИЧИНЫ ПЛОТНОСТИ ПОТОКА ТЕПЛОВОГО ИЗЛУЧЕНИЯ | 1992 |
|
RU2034244C1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
