Изобретение относится к измерительной технике и может быть использовано для контроля направления перемещений, когда место смены направлений не определено.
Цель изобретения - повышение экономичности устройства путем сокращения числа элементов, потребляющих сжатый воздух.
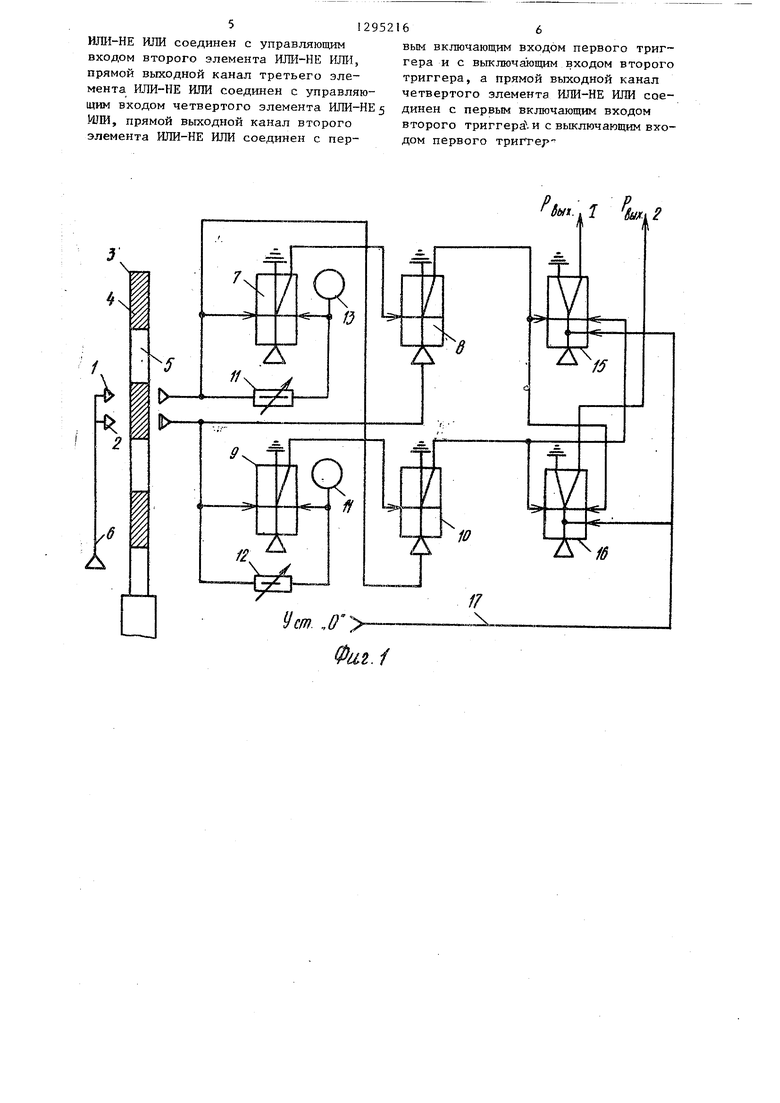
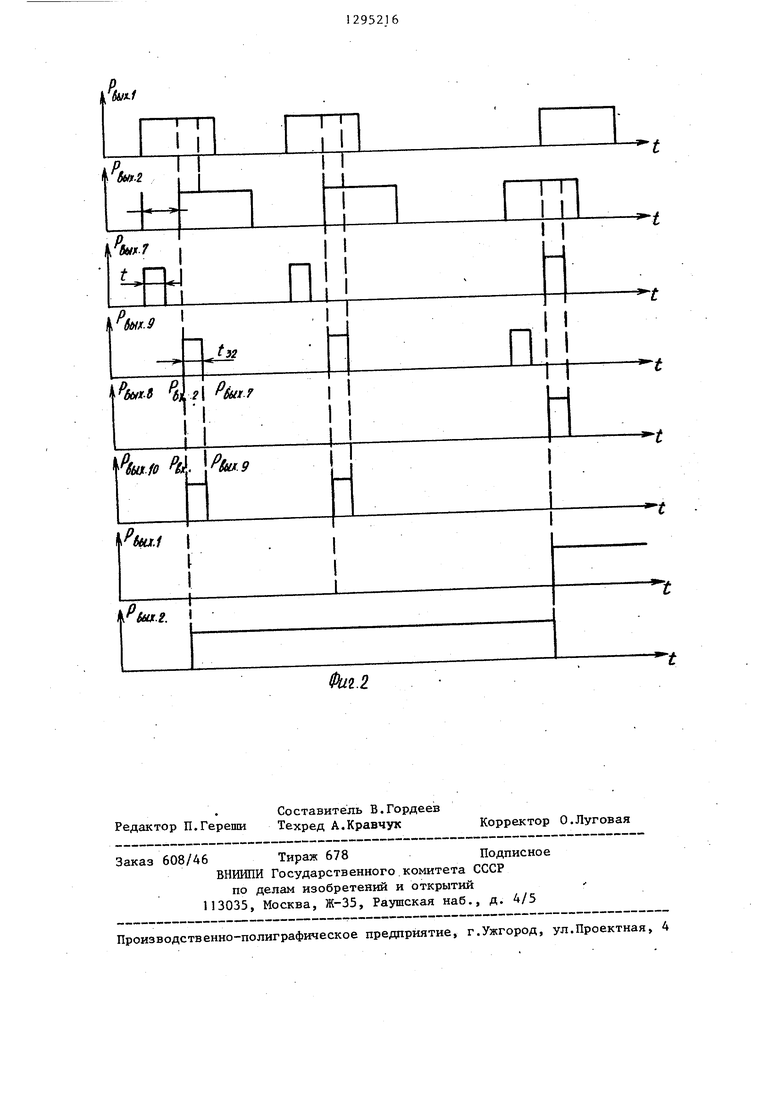
На фиг.1 представлена схема устройства для контроля направления перемещений; на фиг,2 - временная диаграмма работы элементов преобразователя, объясняющая принцип его функционирования.
Устройство, состоит из двух датчиков 1 и 2 типа сопло - сопло, экрана 3 с перемычками 4 и отверстиями 5, которые вместе с датчиками 1 и 2 расположены вдоль направления перемещения, обозначенного стрелкой. Расстояние между датчиками не превы- щает размеров отверстия в экране, а их питание осуществляется по магистрали 6. Преобразователь, сообщенный с выходами датчиков,, содержит четыре элемента РШИ-НЕ ИЛИ 7-10 два инерционных звена, включающие регулируемые пневмодроссели 1 и 12 и пневмоемкости 13 и 14, два триггера 15 и 16 и канал 17 уставки.
Выход датчика 1 соединен одновременно с управляющим входом элемента ИЛИ-НЕ ИЛИ 7, каналом питания элемента ИЛИ-НЕ ИЛИ 10, а через пневмодрос- сель 11 и пневмоемкость 13 с управляющим каналом Запрет элемента ИЛИ-НЕ ИЛИ 7. Выход датчика 2 соединен одновременно с управляющим входом элемента ИПИ-НЕ ИЛИ 9, каналом , питания элемента ИЛИ-НЕ ИЛИ 8, а через пн-г-вмодроссель 12 и пневмоемкость 14 - с управляющим каналом Запрет элемента ИЛИ-НЕ ИЛИ 9. Прямой выходной канал элемента 7 соединен с управляющим входом элемента 8, а инверсный - с атмосферой. Прямой выходной канал элемента 9 соединен с управляющим входом элемента 10, а инверсньй - с атмосферой. Прямой выходной канал элемента 8 соединен одновременно с включающим входом первого триггера 15 и первым выключающим входом второго триггера 16, а инверсный - с атмосферой. Прямой выходной канал элемента 10 соединен одновременно с включающим входом BTODoro триггера 16 и первым выклю
5
0
5
0
чающим.входом первого триггера 15, а инверсный - с атмосферой. К вторым выключающим входам триггеров 15 и 16 подключен канал 17 уставки устройства в исходное состояние.
Устройство работает следующим образом.
Предположим, что в начальном состоянии экран 3 разобщает сопла дат- чиков 1 и 2, на выходах которых сигналы Р( и Р нулевые значения. Подачей сигнала 1 в канал 17 уставки устройство приводится в исходное состояние, а на выходах триггеров 15 и 16 присутствуют нулевые сигналы, так как они, выключаясь, формируют сигнаЬы (,,., 0 и Pgba.) ° том, что перемещение экрана 3 и связанного с ним контролируемого тела отсутствует. .
При перемещении экрана (например, вниз относительно датчиков) сначала открывается сопло датчика 1, и на его выходе появляется сигнал Р(1. Этот сигнал одновременно поступает на управляющий вход элемента 7 и в канал питания элемента 10. В момент поступления сигнала Р( 1 на управляющий вход элемента 7 на его прямом выходе появляется единичный сигнал
Г
5
0
5
0
5
(фиг.2), поступающий на упра вляющий вход элемента 8. Однако, в канале питания этого элемента сигнал давления отсутствует, так как сопла датчика 2 к этому Времени еще разобщены экраном. Поэтому на прямом выходе элемента 8 сигнал также отсутствует, и триггер 16 не изменяет своего со- . стояния. После истечения времени t, (времени задержки сигнала Р, 1 инерционным звеном) сигнал с выхода датчика 1 поступает на управляющий канал Запрет элемента 7. Это приводит к выключению сигнала 1 на прямом выходе элемента 7. На протяжении всего этого времени сигнал Р 1 присутствует в канале питания элемента 10. Поэтому дальнейщее перемещение экрана 3 вниз относительно датчиков и открытие сопла датчика 2 приводит к тому, что сигнал давления поступает на управляющий вход элемента 9 в канал питания элемента 8, а через время t, t,, (время задержки сигнала инерционным звеном) на управляющий вход Запрет элемента 9. Сигнал , поступивщий в канал питания элемента 8, беспре 1
пятственно проходит в атмосферу, так как на управляющем входе этого элемента сигнал с выхода элемента 7 уже равен нулю. В это же время сигнал Р,1 присутствует в канале пита- ния элемента 10, поэтому появление сигнала управляющем входе элемента 9, обусловливающее формирование на его прямом выходе сигнала 1, приводит к тому, что данный сиг нал, поступая на заправляющий вход элемента 10, отклоняет сигнал Р, 1 из канала питания в прямой выходной канал элемента 10, соединенный с включающим входом триггера 16 и вы- ключающим триггера 15. Триггер 15 не изменяет своего состояния, а триггер 16 включается, и на его выходе появляется сигнал Рвь1Х7 сигнализирующий о перемещении экрана и связан ного с ним контролируемого тела вниз относительно датчиков. По истечении времени t сигнал Р, 1 поступает
на вход Запрет элемента 9, что
приводит к установлению на его пря- мом выходе сигнала О. Однако к этому моменту времени триггер 16 уже включился и сформировал выходной сигнал о перемещении экрана.
Дальнейшее перемещение экрана вниз приводит к разобщению сопел датчика 1 (Р, 0), однако не изменяет состояния триггеров 15 и 16. Последующее разобщение сопел датчика 2 () также не влияет на состояние триггеров.
Продолжение перемещения экрана 3 в том же направлении приводит к повторению процесса переключения сигналов в элементах 7-10 преобразова- теля и повторному появлению включающего сигнала на входе триггера 16 и выключающему на входе триггера 15, т.е. состояние триггеров подтверждается.
При смена направления перемещения экрана 3 происходит смена состояний триггеров и, соответственно, появление сигналов Pg,j( 1 и РВУХ 0.
Из циклограммы, иллюстрирующей процессы переключения сигналов в элементах преобразователя (фиг.2), видно, что для обеспечения нормальной работы устройства время задержки сигналов Р, и Р инерционными звенья ми следует выбирать, исходя из уело-
ВИЯ
tyi - t 31 t} - t..
164
где t J, - время длительности вь ходног сигнала 1 на выходе элемента 7, необходимое для надежного включения триггера 15 и выключения триггера 16 (аналогично для элемента 9); t, - промежуток времени между моментами появления сигналов на выходах датчиков 1 и 2 при перемещении экрана 3 с максимальной скоростью. Требуемые значения t и получают путем на- стройки пневмодросселей 11 и 12.
Введение инерционных звеньев и тсазанных связей позволяет исключить из схемы три струйных элемента, что уменьшает расход сжатого воздуха на питание схемы преобразователя приблизительно на 40%, т.е. предлагаемое устройство для контроля направления перемещен ш более экономично по cjpaB нению с известными.
Формула изобретения
Пневматическое устройство для контроля направления перемещений, содержащее два неподвижных датчика типа сопло - сопло, установленнный с возможностью перемещения нормально осям этих датчиков экран с рядом отверстий, датчики установлены относительно друг друга па расстоянии, не превышающем размеры отверстий экрана, преобразователь, включающий четыре элемента РШИ-НЕ ИЛИ, управляющий вход первого из которых соединен с выходным каналом первого датчика, а управляющий вход третьего - с выходным каналом второго датчика, два триггера, ко вторьпч включающим входам которых подключен канал уставки, а выходы триггеров служат выходами устройства, отличающееся тем, что, с целью повышения экономичности устройства путем сокращения числа элементов, потребляющих сжатый воздух, оно снабжено двумя инерционными звеньями, одно из которых установлено в линии связи первого датчика с управляющим каналом Запрет первого элемента ИШ1-НЕ ИЛИ, а второе - в ЛИНИИ связи второго датчика с управляющим каналом Запрет третьего элемента ИШ1-НЕ ИЛИ, первый датчик соединен с каналом питания четвертого элемента ИЛИ-НЕ ИЛИ, второй датчик соединен с каналом питания второго элемента ИЛИ-ЫЕ ИЛИ, прямой выходной канал первого элемента
512952
ИЛИ-НЕ ИЛИ соединен с управляющим входом второго элемента ИЛИ-НЕ ИЛИ, прямой выходной канал третьего элемента ИЛИ-НЕ ИЛИ соединен с управляющим входом четвертого элемента ИЛИ-НЕf ИЛИ, прямой выходной канал второго элемента ИЛИ-НЕ ИЛИ соединен с перЙ г./
166
вым включающим входом первого триггера и с выключающим входом второго триггера, а прямой выходной канал четвертого элемента ИЛИ-НЕ ИЛИ соединен с первым включающим входом второго триггерах и с выключающим входом первого
Редактор П.Гереши
Составитель В.Гордеев Техред А.Кравчук
Заказ 608/46 Тираж 678Подписное
ВНИИПИ Государственного.комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
Корректор О.Луговая
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления доильным аппаратом | 1979 |
|
SU1442978A2 |
| Пневматический лентопротяжный механизм | 1977 |
|
SU684606A1 |
| Пневматическое устройство управления весовым порционным дозатором | 1974 |
|
SU532015A1 |
| Устройство для дискретного весового многокомпонентного дозирования | 1973 |
|
SU510652A1 |
| Устройство для контроля направления перемещений | 1982 |
|
SU1078242A1 |
| Устройство для управления весовым многокомпонентным дозатором | 1978 |
|
SU744489A1 |
| Устройство для контроля направления перемещений | 1984 |
|
SU1226055A1 |
| Устройство для порционного дозирования жидкостей | 1980 |
|
SU1037076A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОВЕРХНОСТНОГО НАТЯЖЕНИЯ ЖИДКИХ СРЕД И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2208777C2 |
| Устройство для анализа состава многокомпонентных электролитных систем | 1985 |
|
SU1339538A1 |
Изобретение относится к измерительной технике и может быть использовано для контроля направлений перемещений. Цель изобретения - повышение экономичности устройства путем сокращения числа элементов. потребляющих сжатый воздух. В пневматическом устройстве нормально к осям двух датчиков типа сопло - сопло установлен экран с отверстиями, который скреплен с объектом перемещения. Обработка сигналов с датчиков производится с помощью четырех элементов ИЛИ-НЕ ИЛИ и двух триггеров. На входе в каналы Запрет двух элементов ИЛИ-НЕ ИЛИ установлены инерционные звенья, это позволяет с меньшим количеством струйных элементов осуществлять переключение триггеров и получать различные сочетания сигналов на двух выходах устройства в зависимости от направления движения экрана, а также иметь нулевые сигналы на выходах при отсутствии движения. 2 ил. с € (О С со ел 
| Устройство для транспортировки и кантовки проката на холодильнике | 1985 |
|
SU1260055A1 |
