Изобретение относится к автоматическому регулированию, предназначено для стабилизации температуры в заданной точке теплофизического объекта с распределенными параметрами (РП-объекта), содержащего тельные запаздывания в передаче различных воздействий и подверженного влиянию контролируемых и неконтролируемых возмущений, и может быть использовано в термостатах, предназначенных для поддержания температуры с высокой .точностью.
Целью изобретения является повышение точности.
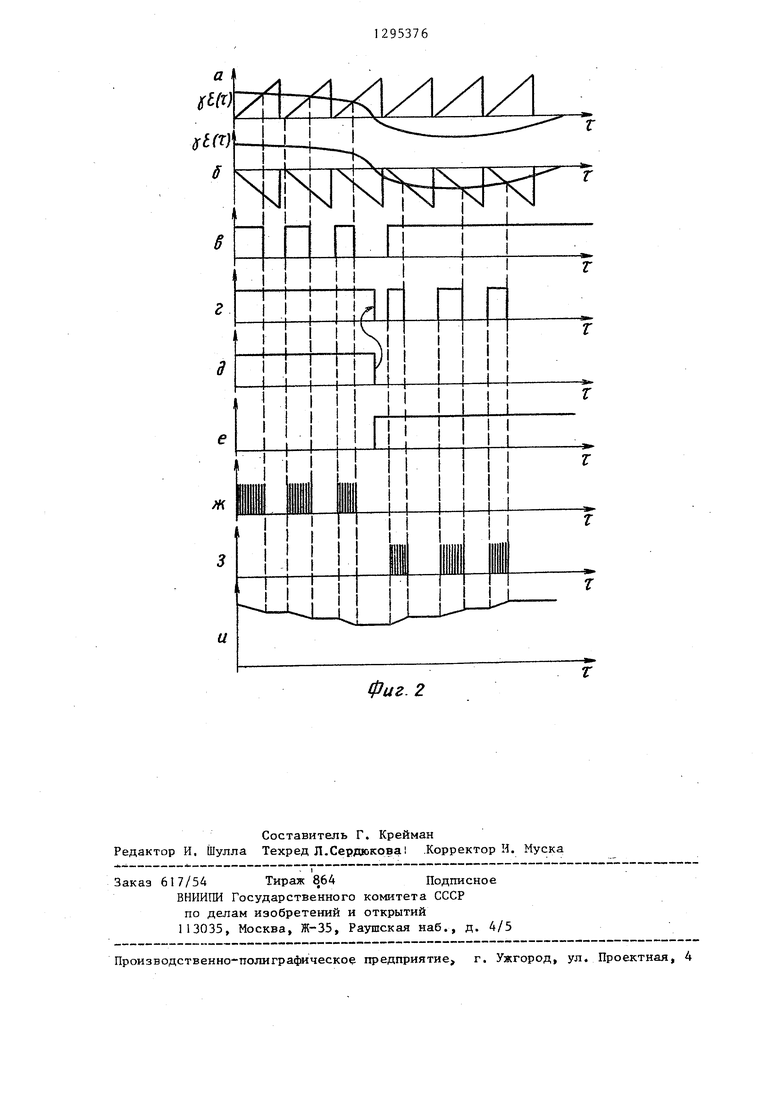
На фиг. 1 приведена блок-схема устройства; на фиг. 2 - временные диаграм№.1 его работы.
Устройство для регулирования температуры содержит датчики 1 температуры в количестве п штук; сумматор 2, первый элемент 3 сравнения, блок 4 управления, усилитель 5, нагреватель 6, задатчик 7 температуры, опоный датчик 8 температуры, опорный задатчик 9 температуры, второй элемент 10 сравнения, блок 11 коррекции, содержащий первый компаратор 12, второй компаратор 13, третий компаратор 14, четвертый компаратор 15, генератор 16 линейно изменяющегося напряжения, инвертирукиций усилитель 17, первый триггер 18, второй триггер 19, генератор 20 импульсов j первый 2, второй 22, третий 23, четвертый 24 элементы И, задатчик 7 температуры состоит из последовательно соединенных ревер- сивного счетчика 25 и цифроаналого- вого преобразователя 26, задатчик 7 снабжен установочным входом 27,
Устройство работает следующим образом.
Поскольку объект управления имеет пространственную форму и представляет собой объект с распределенными параметрами, датчики 1-1-1-п температуры рассредоточены по всему
пространству термостатируемого объек- CQ туру ) в заданой точке М РП- та. Малая постоянная времени - основ- объекта. Результат этого измерения ное требование, предъявляемое к датчикам 1, поэтому их желательно выползатем сравнивают с помощью элемента 10 с заданньш значением темпера туры статирования Т в этой точке
нять на терморезисторах, например.
затем сравнивают с помощью элемента 10 с заданньш значением температуры статирования Т в этой точке.
бусинкового типа, которые при этом « снимаемого с опорного задатчика 9,
обеспечивают и достаточную точность измерения температуры. Опорный датчик 8 температуры устанавливается в заданную точку объекта термостати-
и при наличии отклонения температуры T(t) от заданного значения Т изменяют (по определенному закону) ранее установленное значение средрования, для которой необходимо под- держивать прецизионное термостатиро- вание (в установившемся режиме).
В результате приложения возмущающих воздействий к граничным или к внутренним точкам РП-объекта изменяется его температура. Причем температура в точках РП-объекта, куда подается тепловое возмущающее воздействие, начинает изменяться сразу же в момент подачи возмущений. Во всех остальшлх точках РП-объекта температура изменяется с .некоторым определенным запаздыванием. В ре-. зультате воз1 1ущающих воздействий сразу же без запаздывания начинает изменяться средняя температура тела
Т(, С ь). Для оперативной компенсации возмущений с помощью датчиков 1 и сумматора 2 измеряют среднее значение температуры Т, Сс) РП-объекта, кот орому соответствует напряжение на выходе сумматора 2, т.е.
25
Тср() Ucp()-Ilu;(),
где п - количество датчиков температуры, подключаемых к соответствукицим входам сумматора 2.
Результат этого измерения затем сравнивают с помощью элемента 3 с соответствующим значением
) поступающего с задатчика 7, и при наличии отклонения среднего значения () от заданного изменяют с помощью блоков 4 и 5 мощность нагревателя 6 до устранения
этого отклонения, т.е. блок 4 управления отрабатывает ошибку рассогласования в соответствии с заложенным в него законом регулирования (репейный, пропорциональный, пропорционально-интегральный и т.д.), сигнал управления которого через усилитель 5 поступает на нагреватель 6.
При этом одновременно с помощью опорного датчика 8 измеряют температуру ) в заданой точке М РП- объекта. Результат этого измерения
затем сравнивают с помощью элемента 10 с заданньш значением температуры статирования Т в этой точке.
и при наличии отклонения температуры T(t) от заданного значения Т изменяют (по определенному закону) ранее установленное значение средней температуры объекта устранения этого отклонения,
Б качестве конкретного примера осуществления устройства взят принцип непрерывной (пошаговой) адаптации задающего напряжения (f) к возмущающим воздействиям. Таким образом, при изменении напряжения- задания (tr) на выходе цифроанало- гового преобразователя 26 или при подаче единичного скачка с выхода сумматора 2 система отрабатывает задание по двум контурам регулирования - основного контура регулирования и контура адаптации. Причем основной контур регулирования .с минимальным запаздыванием и с максимальным запаздыванием и с максимальным быстродействием реагирует на все возмущения в РП-объекте,осуществляя грубую регулировку температуры в заданной точке М, Контур адаптации работает в более медленном темпе и осуществляет точную (пошаговую) регулировку температуры в точке М, В качестве цели итеративного процесса адаптации, исходя из которой выбирается алгоритм изменения
и
д, ( С ), берется цель управления
чОk«
(1)
(itOк«
Е( г)т„(г)-т
аА
inin.
где , 2, ... - номер итерации, а Т „(С ) - температура в заданной точке
«
М РП-объекта, в которой необходимо с определенной точностью поддерживать заданное значение Т,дд температуры. Дпя достижения цели (1) применяется градиентный метод, состоящий в изменении задающего напряжения и,д (€) в направлении, противоположном градиенту функции ) по
К+1 , ,
настраиваемому параметру U,,g(.T;.
При этом градиентный алгоритм адаптации функции (1) принимает вид
Сд ()(ЕТЬ.
где Д| О - множитель, характеризующий длину шага алгоритма, выбор которого осуществляется из условия работоспособности систе.
Контур адаптации работает следующим образом.
Сигнал l( i) с выходной переменной РП-объекта управления в заданной точке М поступает на второй элемент 10 сравнения, где из него вычи, v10
f5
20
25
2953764
тается сигнал . о заданном значении. В зависимости от знака сигнала ошибки () T(i) , на выходах компараторов 12 и 15 устанавливаются логические сигналы О или l (фиг. 2 д и е). Импульсами с выхода генератора 20 импульсов периодически запускается генератор 16 линейно изменяющегося напряжения и устанавливаются в единичное состояние триггеры 18, 19 (фиг. 2 в и г). Линейно изменяющееся напряжение с выхода генератора 16 и инвертирующего усилителя 17 сравнивается на компараторах 13 и 14 с сигналом уЕ( с ), поступаю- дам с выхода элемента 10 сравнения (фиг. 2 а и б). На выходах триггеров 18 и 19 формируются импульсы, ширина которых пропорциональна сигналу рассогласования E(t) и которые заполняются с помощью элементов И 23 и 24 импульсами стабилизированной частоты с выхода генератора 20 им-, пульсов (фиг. 2 ж и з). На реверсивном счетчике 25 получается алгебраическая сумма начальных условий и импульсов, поступающих с выходов элементов И 23 и 24. Таким образом, на выходе цифроаналогового преобразователя 26 периодически с периодом
,;v .. ,
1- -ion с-обР °оть1 генератора 16 линейно изменяющегося напряжения формируется напряжение задания ), равное и,:; д(и,„д ()) (фиг. 2 и), где г оГ - максимальное запаздывание в какой-либо точке РП-объекта относительно управ- ляющегочвоздействия,/TO - постоянная времени объекта. При необходимости приведенный или какой-либо другой алгоритм адаптации может осуществлять микропроцессор, подключенный в контур адаптации.
Предлагаемое устройство позволяет добиться инвариантности точности, быстродействия и запаса устойчивости самонастраивающейся системы от детерминированных и случайных возмущений на РП-объект в установившемся режиме.
Формула изобретения
Устройство для регулирования температуры, содержащее датчики температуры, сумматор, последовательно соединенные первый элемент сравнения, управления, усилитель и нагре30
35
40
45
50
55
ватель, а также задатчик температуры, опорный датчик температуры, опорный задатчик температуры, второй элемент сравнения, а тарсже блок коррекции содержащий три компаратора, генератор линейно изменяющегося напряжения, инвертирующий усилитель и первый триггер, причем датчики температуры соединены с входами сумматора, рыходы задатчика температуры и сумматора подключены к входам первого элемента сравнения, а выходы опорных датчика и задатчика температуры - к входам второго элемента сравнения, выход которого подключен к вход блока коррекции, отличающее с я тем, что, с целью повышения точности, выходы блока коррекции связаны с управляющими входами задатчика температуры, состоящего из последовательно соединенных реверсивного счетчика и цифроаналогового Преобразователя, причем счетные входы реверсивного счетчика подключены к входам задатчика-температуры, а выход цифроаналогового преобразователя - к его выходу, установочный вход реверсивного счетчика соединен с установочным входом задатчика, блок коррекции дополнительно содержит генератор импульсов, четвертый Компаратор, второй триггер и четыре
/
элемента И, причем один из входов каждого компаратора соединен с входом блока коррекции, другие входы первого и четвертого компараторов соединены с общей щиной, другой вход второго компаратора соединен с выходом генератора линейно изменяющегося напряжения и входом инвертирующего усилителя, к выходу которого подключен другой вход третьего компаратора, выхода первого и второго компараторов соединены с входами первого элемента И, а выходы третьего и четвертого компараторов - с входами второго 5 элемента И, выходы первого и второго элементов И соединены с одним из входов каждого триггера, выход первого триггера связан с первым входом третьего элемента И, а выход второго триггера - с первым входом четвертого элемента И, выход генератора импульсов соединен с управляющим входом генератора линейно изменяющегося напряжения, с другими входами каждого триггера и с вторыми входами третьего и. четвертого элементов И, третьи входы которых связаны соответственно с выходами первого и чет- вертрго койпараторов, а выходы третьего и четвертого элементов И сое- динены с выходами блока коррек - ции.
0
5
0
.
(Ptil. i
«bl 2 1xV1/l
6
JIJVNV
IIII
и
Фиг. 2

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАГРУЖЕНИЕМ ПРИ ПРОГРАММНЫХ ИСПЫТАНИЯХ МЕХАНИЧЕСКИХ КОНСТРУКЦИЙ НА УСТАЛОСТНУЮ ПРОЧНОСТЬ | 2007 |
|
RU2365963C2 |
| Устройство для регулирования температуры | 1986 |
|
SU1403025A1 |
| Устройство для управления многоканальным вибростендом | 1980 |
|
SU924665A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАГРУЖЕНИЕМ ПРИ ПРОГРАММНЫХ ИСПЫТАНИЯХ МЕХАНИЧЕСКИХ КОНСТРУКЦИЙ НА УСТАЛОСТНУЮ ПРОЧНОСТЬ | 2007 |
|
RU2365965C2 |
| Термостатирующее устройство | 1983 |
|
SU1193647A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНОЙ ВОСПРИИМЧИВОСТИ РУДНЫХ МАТЕРИАЛОВ | 1992 |
|
RU2006046C1 |
| Устройство для моделирования оптимальной системы управления | 1984 |
|
SU1254432A1 |
| Устройство для моделирования силовыхпАРАМЕТРОВ пРОцЕССА зубОфРЕзЕРОВАНияпО МЕТОду ОбКАТКи | 1979 |
|
SU805353A1 |
| Устройство для регулирования неэлектрических величин | 1979 |
|
SU860017A1 |
| Регулятор температуры | 1983 |
|
SU1161929A1 |

Изобретение относится к автоматике и предназначено для стабилизации температуры в заданной точке объекта с распределеннь ми параметрами. Устройство содержит п измерительных датчиков, распределенных по объекту и один опорный датчик, установленный в точке, где необходимо стабилизировать температуру, с целью повышения точности. Сигналы с п датчиков сум№-1руются и сравниваются со значением задатчика, выходной сигнал которого определяется величиной отклонения температуры в точке установки опорного датчика от заданной и регулируется при помощи блока коррекции, формирующего управляющий сигнал для задатчика. При этом задат- чик состоит из последовательно соединенных реверсивного счетчика и ЦАП, а блок коррекции выполнен в виде широтно-импульсного модулятора с заполнением импульсов импульсным сигналом генератора опорной часто- ты, причем выходы блока коррекции соединены со счетными входами входами реверсивного счетчика, 2 ил. SS
| Термостат | 1983 |
|
SU1101795A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| 0 |
|
SU334559A1 | |
| Кипятильник для воды | 1921 |
|
SU5A1 |
