В ОСНОВНОМ авт. св. Л 1280оЗ описана система для систем автоматического регулирования и унравления с монотонно ллн ступенчато возрастающим законом изменения коэффициента усиления, вкоторой применен фильтр, проиускающий частоты, лежащие ниже частоты авто колебаний системы авторегулирования, блок суммирования, вырабатывающий управляющий сигнал нри возникновении в системе автоколебаний, и блок унравления коэффициентом усилеиня канала АРУ.
Предлагаемое дополнительное изобретение расширяет область использоваиня основного авт. св. Ла 128053, позволяя применить его для автоматического регулирования уснления при произвольиом, а ие только монотонно и ступенчато-возрастающем законе измеиення коэффициентов усиления. Это достигается тем, что в исполнительное устройство введена дополнительиая цепь лсестко обратиой связи.
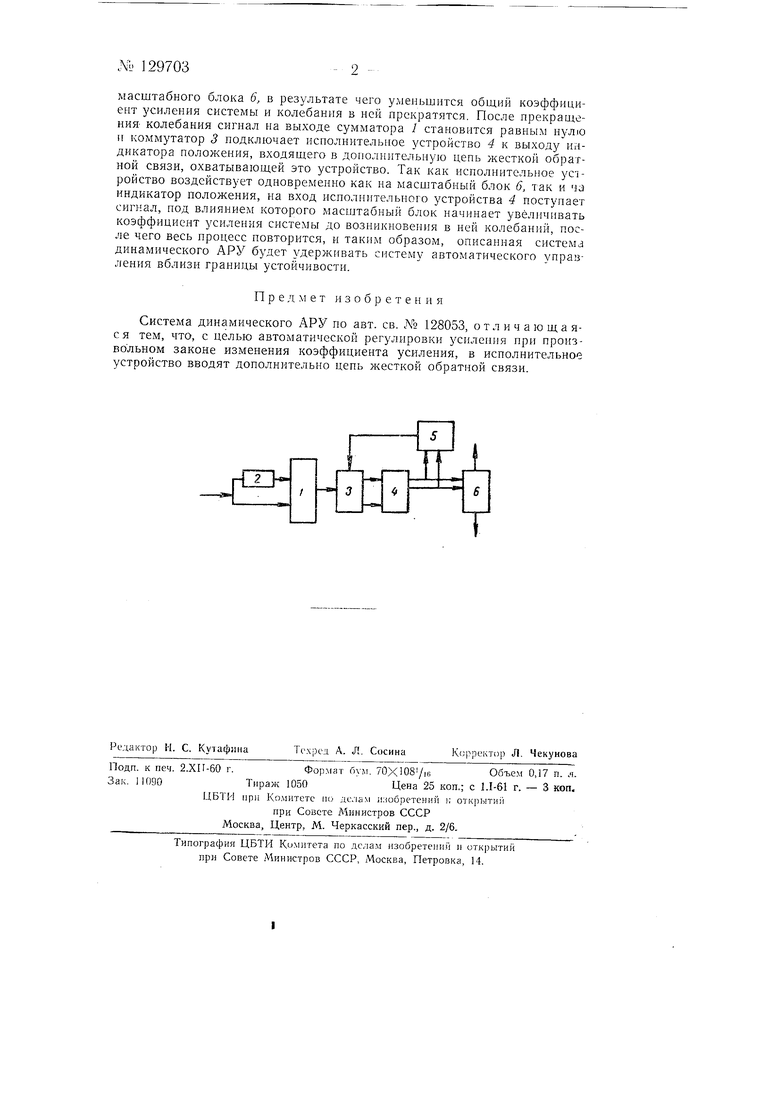
Входной сигнал иостуиает на сумматор / (см. блок-схему), в качестве которого могут быть использованы двухобмоточное релеили магнитный усилитель, через полосовой фильтр 2 низких частот и непосредственно. Сигнал, полученный на выходе сумматора /, используется дли управления коммутатором 3, служащим для подключения вход,а иснолнительного устройства 4, например серводвигателя, к выходу коммутатора 3 или к выходу индикатора полол ения 5 масщтабногоблока 6, з качестве которого может быть использован вращающийся трансформатор или нотенциометр. В случае увеличения коэффициента усиления в системе, охваченной динамическим АРУ, нарущается равнов есие и эта система переходит в колебательный режнм. При наличии колебательного режима низкочастотные составляющие через фильтр 2 постуиают на сумматор и коммутатор 3, отключает исполнительное устройство 4 от масщтабного блока 6. Сигнал с выхода сумматора / поступает на исполнительное устройство 4, которое уменьшает коэффициент передачи
масштабного блока 6, в результате чего ул1еньшится общий коэффициент усиления системы и колебания в ней прекратятся. После прекращения- колебания сигнал на выходе сумматора / становится равным нулю и коммутатор 3 подключает исполнительное устройство 4 к выходу индикатора положения, входящего в доиолиительиую цепь жесткой обратной связи, охватывающей это устройство. Так как исполнительное устройство воздействует одновременно как на масщтабиый блок 6, так и ча индикатор положения, на вход исполнительного устройства 4 поступает сигнал, под влиянием которого Л1асщтабный блок начинает увеличивать коэффициент усиления системы до возникновения в ней колебаний, после чего весь процесс повторится, и таким образом, описанная система динамического АРУ будет удерживать систему автоматического упрагзлеиия вблизи границы устойчивости.
Предмет изобретения
Система динамического АРУ по авт. св. № 128053, отличающаяся тем, что, с целью автоматической регулировки уснлепия при произвольном законе изменения коэффициента усиления, в исполнительное устройство вводят доиолиительно цепь жесткой обратной связи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесконтактное трехпозиционное реле | 1956 |
|
SU111155A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ РАЗЛОЖЕНИЯ КОРРЕЛЯЦИОННОЙ ФУНКЦИИ В РЯД ЛАГЕРРА | 1973 |
|
SU394806A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ НАСТРОЙКИ КОЛЕБАТЕЛЬНОГО КОНТУРА УСИЛИТЕЛЯ МОЩНОСТИ | 1990 |
|
RU2017327C1 |
| МЕТАЛЛООБНАРУЖИТЕЛЬ | 1994 |
|
RU2098848C1 |
| СИСТЕМА НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2191345C2 |
| СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ ИНЕРЦИОННОГО ОБЪЕКТА | 2002 |
|
RU2225633C1 |
| СЛЕДЯЩАЯ СИСТЕМА | 2003 |
|
RU2252435C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МОЩНОСТЬЮ ГИДРОАГРЕГАТА ГЭС | 2024 |
|
RU2830453C1 |
| Устройство для ранней диагностики образования и развития микротрещин в деталях машин и конструкциях | 2022 |
|
RU2788311C1 |
| Устройство для автоматического управления инерционным объектом при ограниченном управляющем воздействии | 1978 |
|
SU930251A2 |
